






 本文从工程实现和新手入门的角度探讨机械臂的力控和动力学辨识,介绍了基于电流环、末端六维力传感器、关节力矩传感器的方案,并详细讲解了如何在低速状态下仅辨识重力和摩擦力,提供了一个简单易行的辨识方法。
本文从工程实现和新手入门的角度探讨机械臂的力控和动力学辨识,介绍了基于电流环、末端六维力传感器、关节力矩传感器的方案,并详细讲解了如何在低速状态下仅辨识重力和摩擦力,提供了一个简单易行的辨识方法。
本菜从工程实现角度和新手入门来介绍力控和动力学辨识拖动问题,高手勿喷啊~!
(首先给自己打个科研小广告,本菜私人学生小团队正在做,XX最优轨迹规划,有志同道合的小伙伴希望私下交流哈)
机械臂力控方案(以下方案都是本菜实际用过的):
1基于电流环控制,传统的工业动力学辨识,电流稳定性与控制品质或者辨识效果有很大关系
2.基于末端六维力传感器,就是导纳控制,可以参考我之前代码很容易实现末端的柔顺控制。
3.基于关节力矩传感器,替代电流辨识,虽然数值稳定,但是仍然需要辨识动力学
如果单纯从控制稳定性和工程应用角度来讲
针对末端任务肯定是 六维力最好,有力反馈精度。如果考虑到人机协作那么关节力矩优势就出来了,可实现连杆上的柔顺。最后才是电流,因为这个精度和干扰,包括摩擦力很难说。
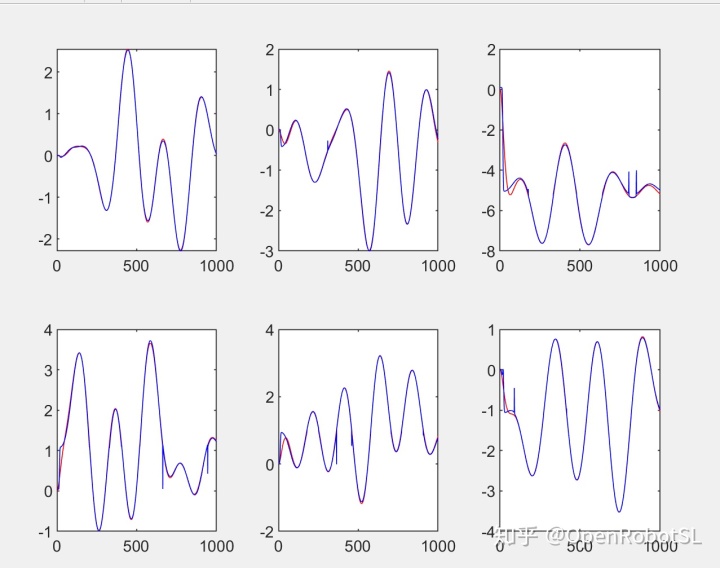
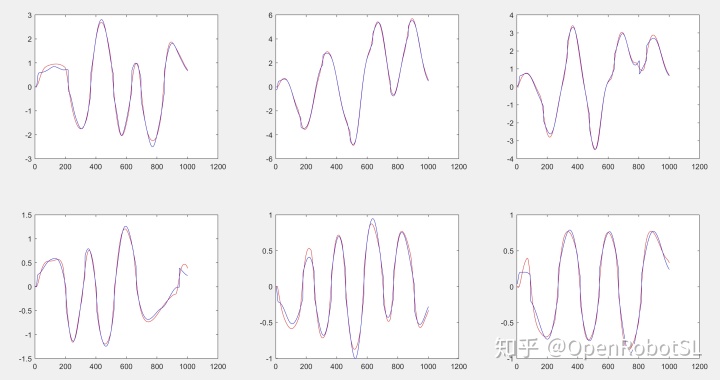
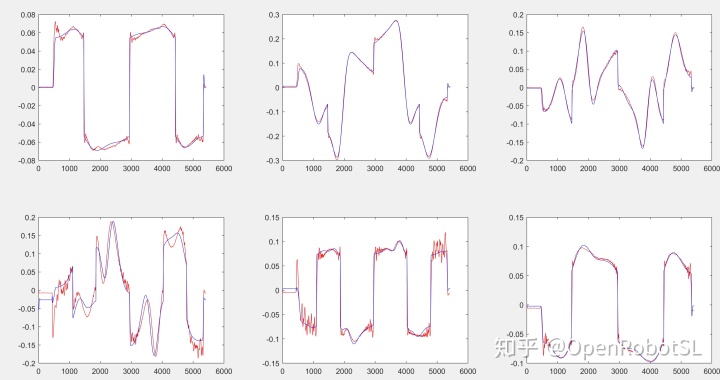
下面附上我用电流和力矩传感器分别做的全动力学辨识效果图,六维力传感器大家已经司空见惯了。(这部分为本菜论文内容暂时不做介绍,干货在下面)
下图基于力矩传感器全动力学辨识
下图基于电流全动力学辨识
干活来了~!
好了,现在来告诉大家如何工程或者入门级别实现动力学辨识
首先我们要知道机器人动力学模型是MCGF形式,M惯性,C耦合力,G重力,F摩擦力,那么在拖动的时候机械臂是出于低速状态,静止的时候就是速度加速度为0,所以MC几乎是没有影响的,那么只需要辨识重力G+摩擦力F就可以了。
是的,你没听错,那么如何辨识呢,首先基于标准DH建模,拉格朗日动力学建模就能帮我门建立出机器人G重力项,而且非常简单,可以看到公式
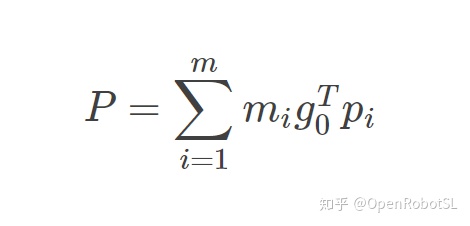
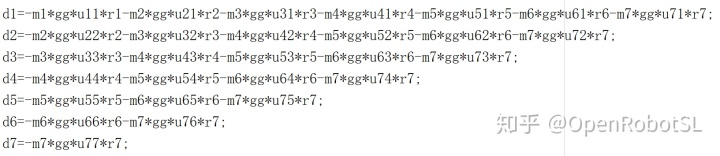
P(程序中d)为重力势能,是不是灰常简单呢,里面只有质量m,重力加速度g0(gg),质心位置p(r),上面还少了Uii旋转变换矩阵(程序中Uii),大家可以看书哈。 那么你把这个表达式仔细看一下,会发现他最后展开结果就是m, mx,my,mz的线性组合,所以直接可以用最小二乘辨识有木有!是不是灰常简单!
tau=W*P
W是系数只与关节位置有关,通过U旋转变换可以获取,P就是上面的质量和质心未知参数。
最后大家补一个摩擦力就行了!
还需要注意的是:我们因为只需要辨识重力,所以机械臂在获取运动轨迹数据的时候一定要低速运行,避免激发出惯性和耦合力项!
好了现在大家可以下手试试啦,下面给他加看看只辨识重力+摩擦力的结果,实际拖动会非常自如。
希望大家把自己成功辨识和拖动实现发出来开森开森~~~!

















 5715
5715

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









