








总结
感觉点云重点的应该是三部分:基础点云类型,配准,聚类
配准:NDT。icp。SAC_IA+FPFH
聚类:VFH描述子,区域生长等
不熟悉部分:对于各种特征点,描述子,以及聚类相关接触较少,可以重点了解下。
点云配准
ICP
PLC基础
PointT类型
- PointXYZ中石是有四个data的,其目的是为了对齐

- PointXYZI中是两个data[4],原因是因为,如果把强度放到第一个datap[4]的第四位后,会影响xyz的点积。
- Normal成员,里边包含了法向量和曲率,这个类似于PointXYZI
- PointNormal,包含点的坐标,法向量和曲率

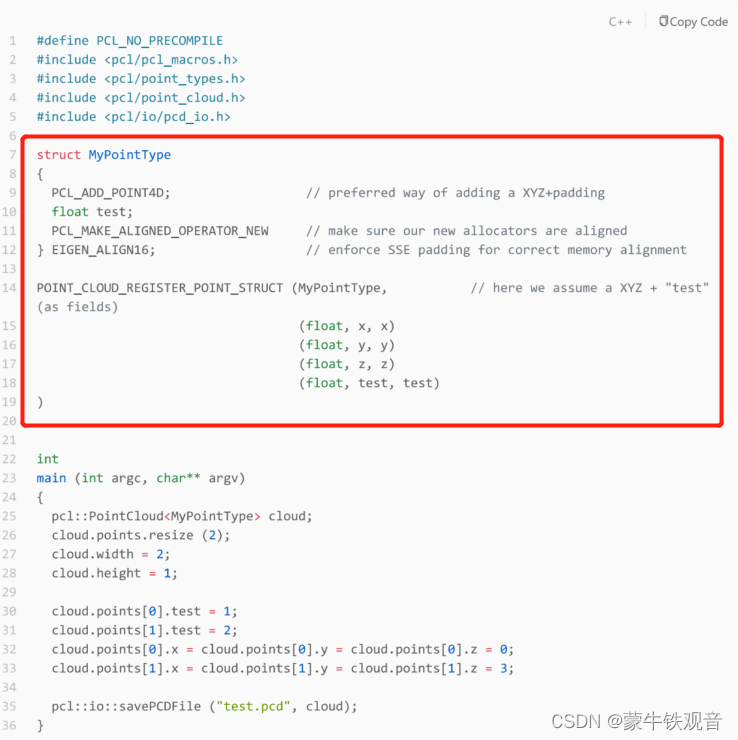
- 定义自己的点类型
PCD文件的相关内容
- 除了pcd文件,pcl还可以操作ply格式的点云文件
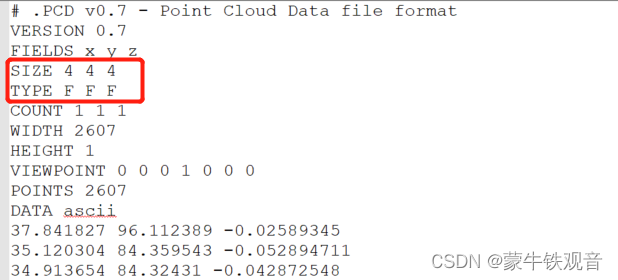
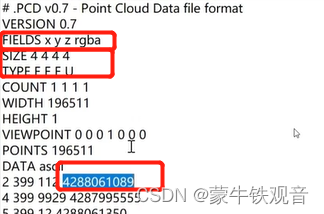
- pcd的文件
kdtree和八叉树介绍及应用示例
- 都是只讲理论,没有意思
点云可视化
- 用处也不是很大
- PCLVisualizer讲了pcl的可视化,但是我们用的时候多数是在ros上,用rviz可视化会更方便一些
- PCLPlotter可视化特征直方图(FPFH)
快速点特征直方图(FPFH)描述子
这个是指对于某个特征点,其周围其他点的分布情况构成的一个直方图。
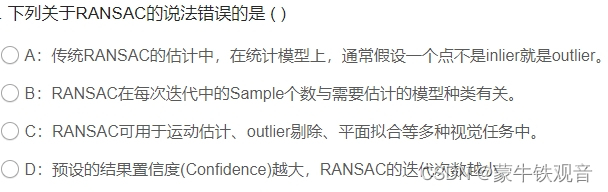
随机采样一致性
- 一个面试题。答案是D, 置信度越高即精度越高, 停止迭代的误差阈值越小, 迭代次数越多
PCL关键点
需要自己去查一查,这个人讲的不好
NARF
基础
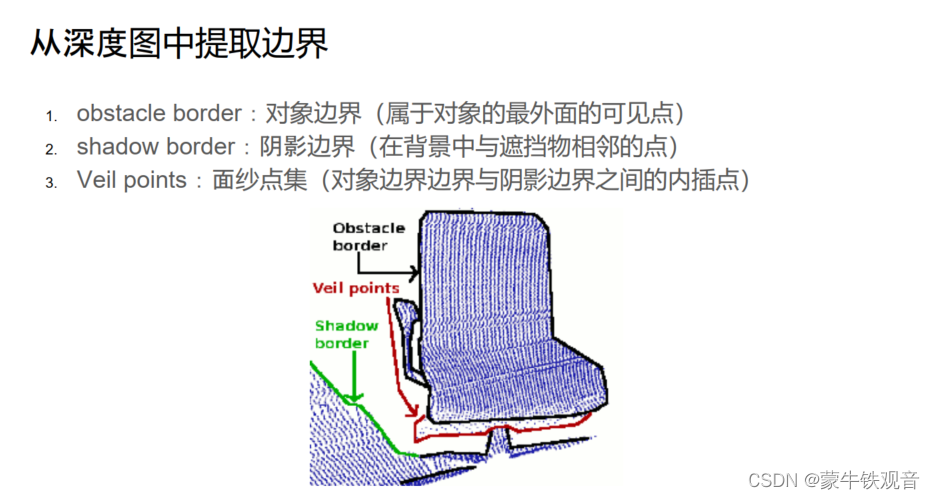
- NARF是基于深度图的(RangeImage)
- 了解三种深度图的边界点,object borders; shadow borders;veil points;这三种点pcl提供了提取方法
关键点的内容
- Normal Aligned Radial Feature
- 要求
- 提取的过程必须将边缘以及物体表面变化信息考虑在内
- 关键点位置必须稳定,可以被重复探测,即使换了不同的视角
- 关键点所在的位置必须有稳定的支持区域,可以计算描述子并进行唯一的方向量估计
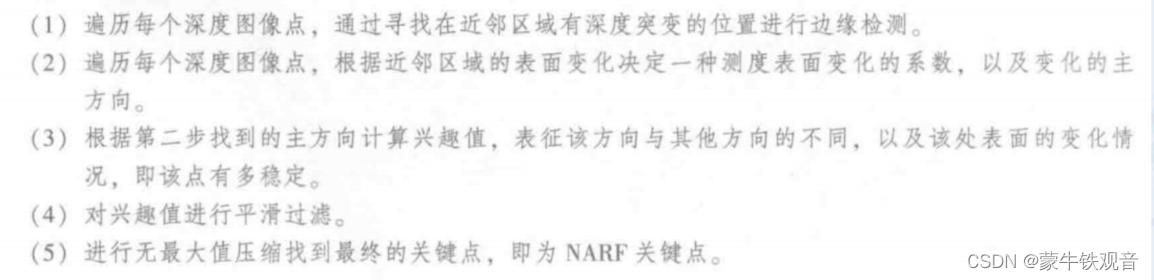
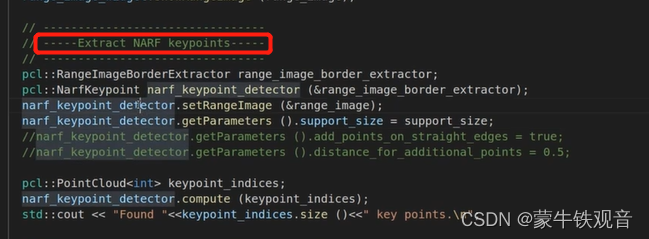
- 步骤
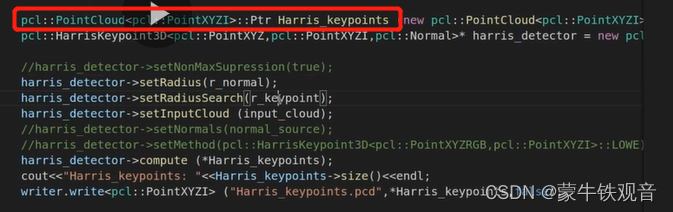
Harris
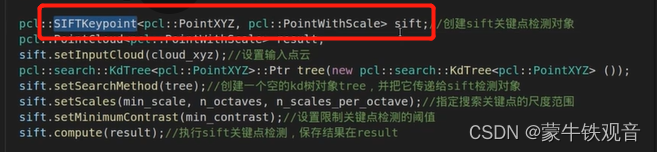
SIFT
被申请了专利,商业上不可以随便用
描述子
PFH,FPFH,vfh
滤波方法
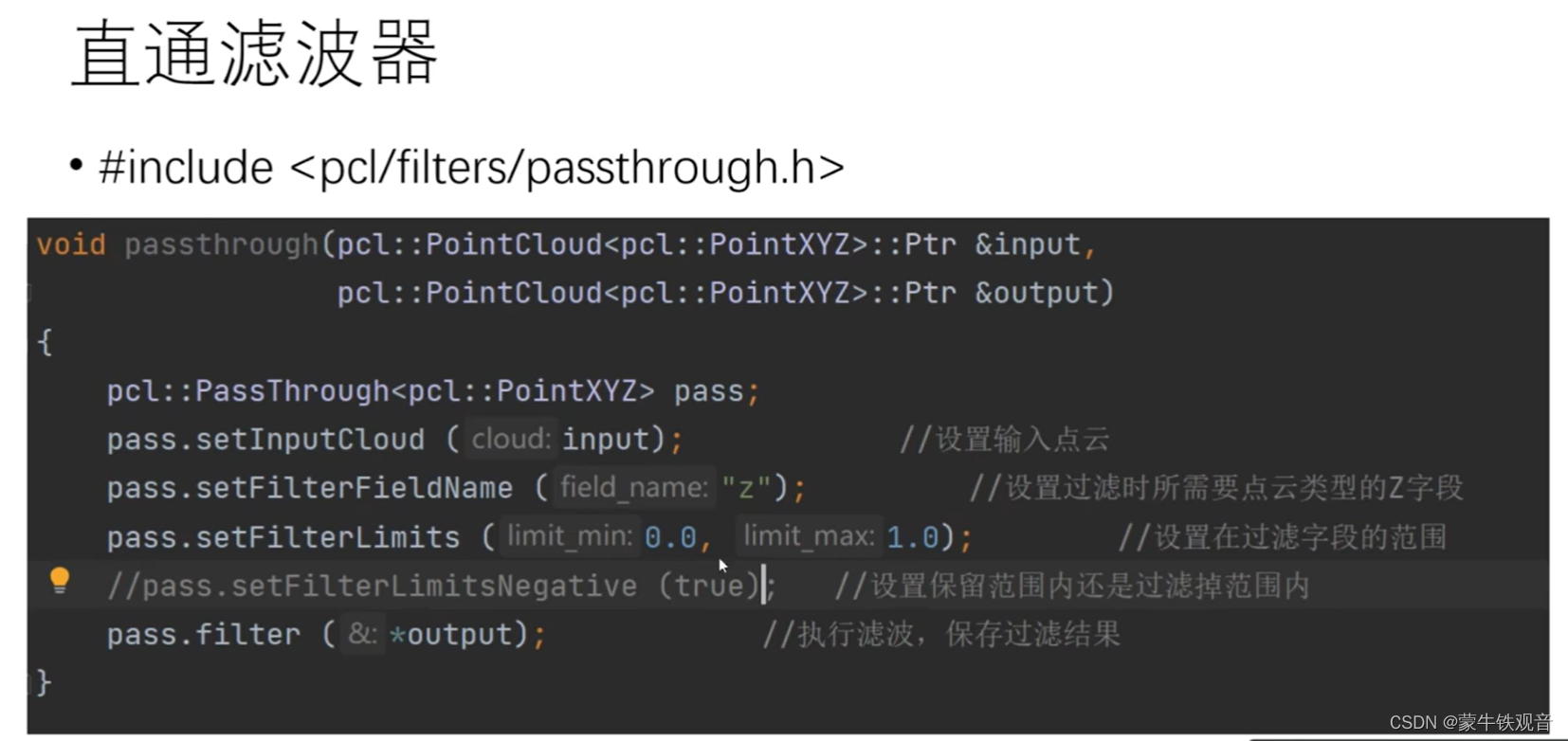
直通滤波
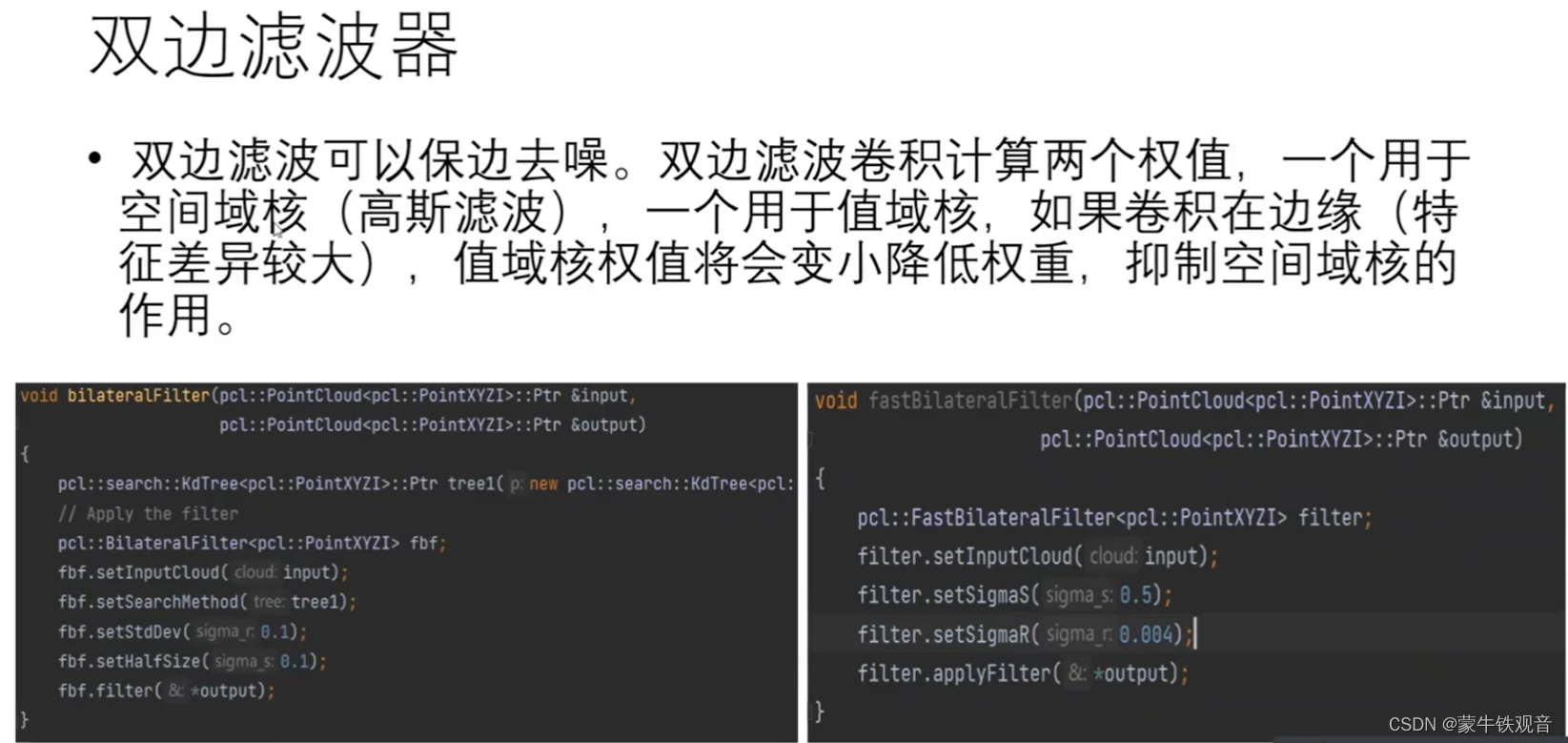
双边滤波器
体素滤波器
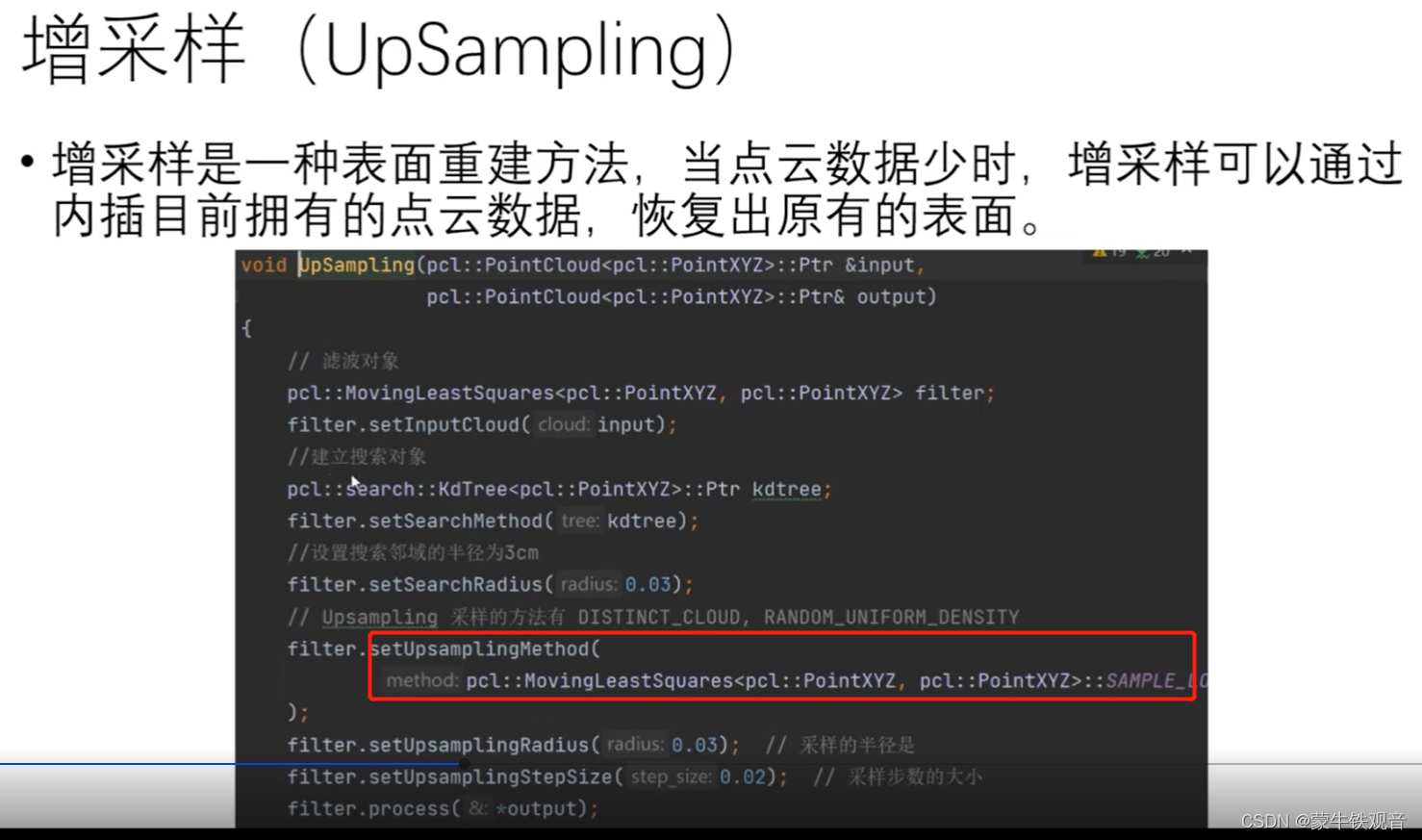
增采样
统计滤波器
- 可以用于去除噪点
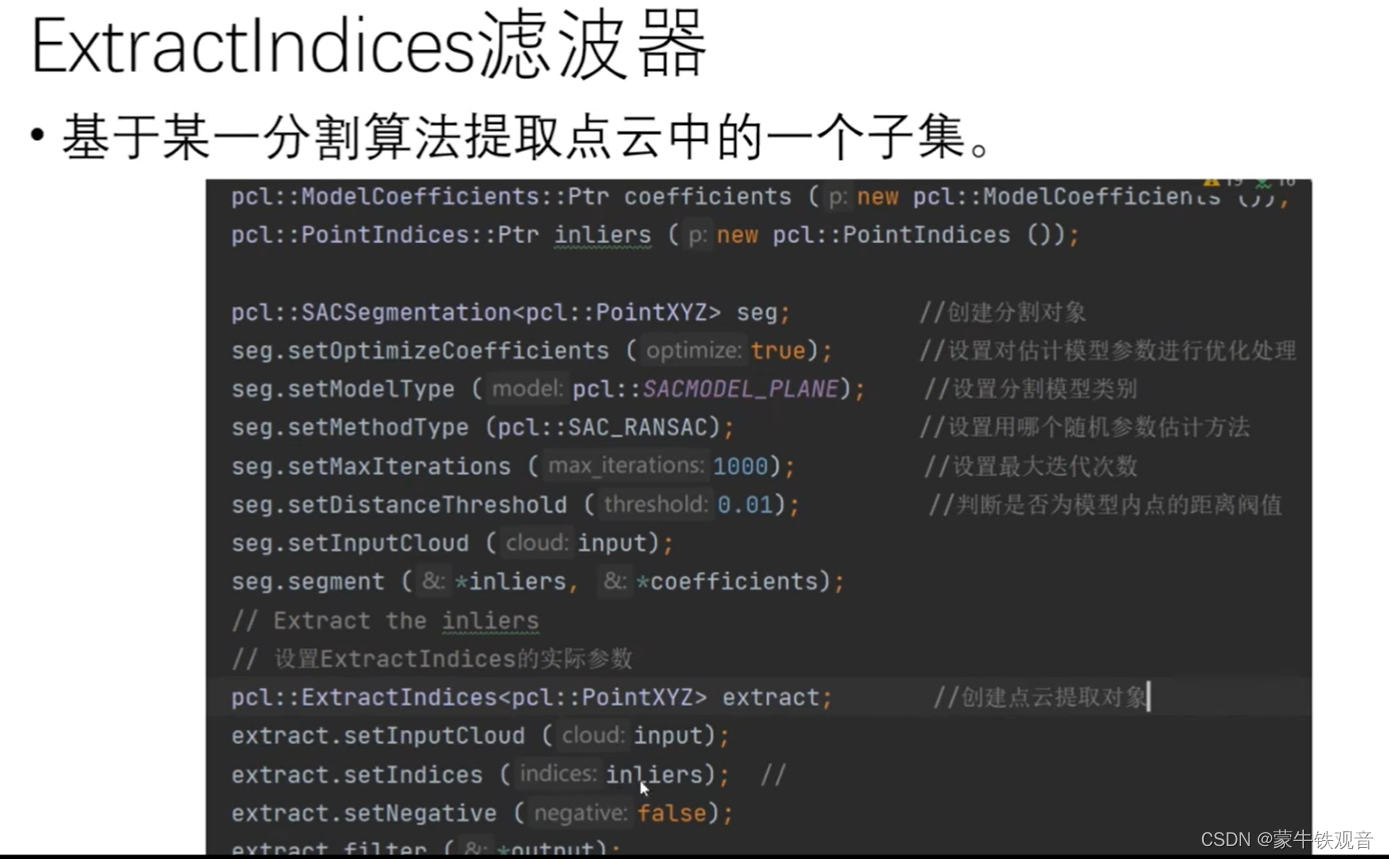
ExtractIndices
- 分割算法
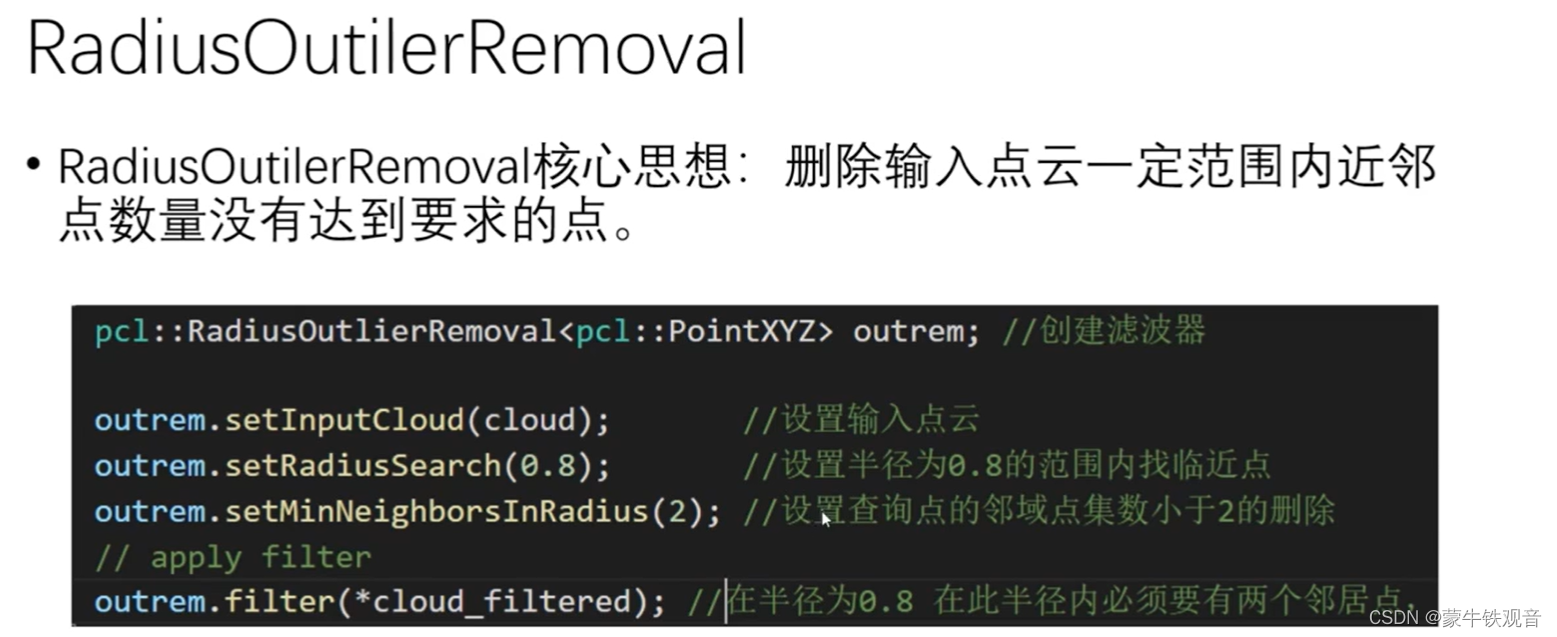
径向滤波器
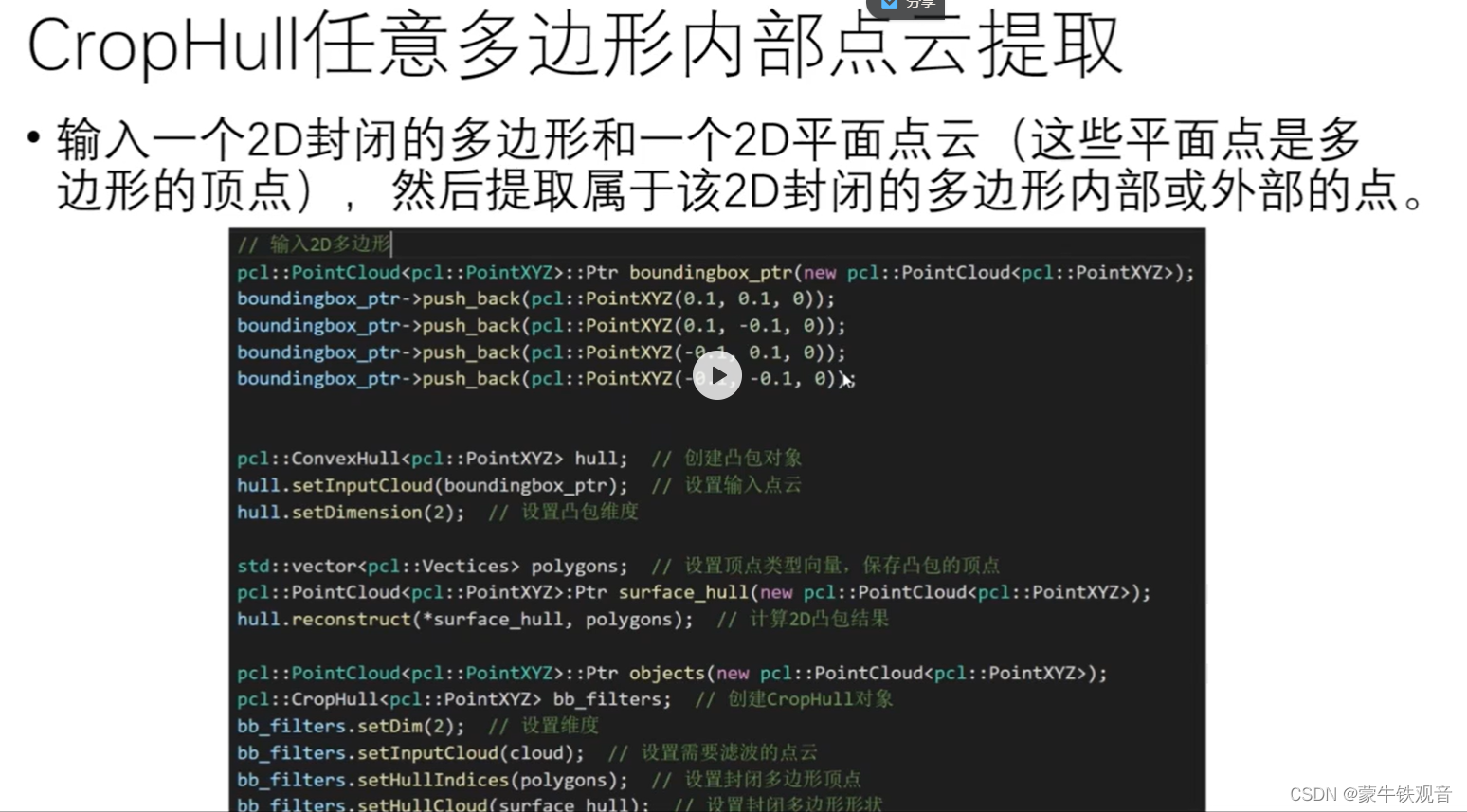
任意多边形内部点云提取















 36万+
36万+











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









