






参考:https://ww2.mathworks.cn/help/physmod/sm/cad-import.html
第一步: CAD->XML multibody description file
参考:https://ww2.mathworks.cn/help/physmod/sm/ug/installing-and-linking-simmechanics-link-software.html
1、下载相应版本的Simscape Multibody Link Plug-In
下载目录:
https://ww2.mathworks.cn/campaigns/offers/download_smlink_confirmation.html?elqsid=1550726219587&potential_use=Student
如包含:
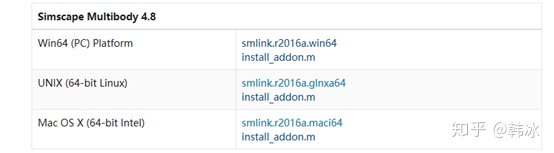
2、以管理员运行MATLAB,并在命令行窗口执行install_addon('smlink.r2016a.win64')
3、在命令行窗口执行smlink_linksw,生成SolidWorks所使用的插件cl_sldwks2sm.dll
4、打开SolidWorks ,进入工具(Tools)->插件(Add-Ins),选择 Simscape Multibody Link 复选框
注:加载模型后才会显示Simscape Multibody Link选项(在“工具”下),利用该选项可导出XML multibody description file。测试发现加载stl模型时没有出现Simscape Multibody Link选项,加载.step, .sldasm均可出现。
5、在SolidWorks中,选择工具->Simscape Multibody Link->Export-> Simscape Multibody导出XML multibody description file(.xml)
注:执行该步时,需在MATLAB命令行窗口运行regmatlabserver,开启自动服务。
第二步: XML multibody description file-> Simscape Multibody Link
参考:https://ww2.mathworks.cn/help/physmod/sm/ug/import-a-cad-assembly-model.html
MATLAB命令行窗口运行smimport('sm_robot'),会生成.slx,内部是Simscape Multibody模型。
注:1)sm_robot为XML multibody description file的文件名。
2)生成的模型不一定是所希望的模型结构,其结构取决于SolidWorks所建立的模型,可能需要做局部修改后才能使用。















 3040
3040

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









