







 本文详细解释了如何将深度图中的(x, y, z)坐标转换为鸟瞰图(BEV)坐标系,涉及深度值与点云坐标的对应关系,以及使用相机内参intrix进行坐标变换的公式。理解这些转换对于点云处理和自动驾驶至关重要。
本文详细解释了如何将深度图中的(x, y, z)坐标转换为鸟瞰图(BEV)坐标系,涉及深度值与点云坐标的对应关系,以及使用相机内参intrix进行坐标变换的公式。理解这些转换对于点云处理和自动驾驶至关重要。
参考自:https://blog.csdn.net/weixin_40000540/article/details/86428228
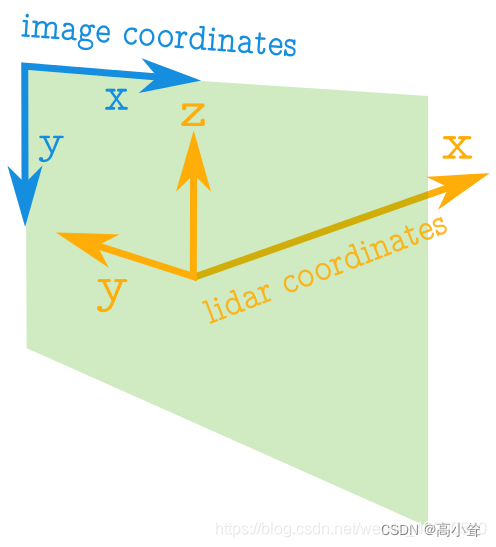
深度图中的(x,y,z)坐标是与鸟瞰图中的(x,y,z)不同的。对应关系如下:
bev_x = depth_z # 深度图中的深度值depth_z即为点云坐标系下的x
bev_y = - depth_x / intrix[0,0] # 利用深度图中的x求出的是点云坐标系下的y
bev_z = - depth_y / intrix[1,1] # 利用深度图中的y求出的是点云坐标系下的z
# intrix -- 相机内参
图像关系见下图:

















 5632
5632

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









