







1. 模块介绍
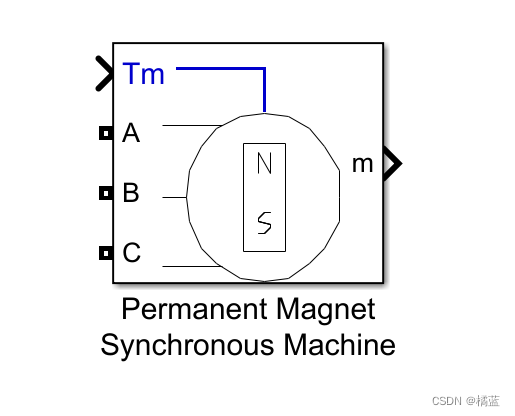
Simulink提供了专门用于电力系统仿真,包括电机的动态建模和控制的电机模型,其中,永磁同步电机模块 Permanent Magnet Synchronous Machine 支持实现三相或五相永磁同步电机模拟,电机绕组采用星型连接,在这种连接方式中,电机绕组的一端连接在一起形成一个公共点,通常称为中性点(Neutral Point),而另一端则分别连接到三相电源。
三相PMSM可以设置正弦电动势和梯形电动势两种不同的电动势波形,对于正弦波形电机,转子可以是圆的或凸极的。当电动势波形呈梯形时,转子为圆形。五相PMSM则默认为正弦电动势波形和圆形转子。
正弦模型假定定子内永磁体所产生的磁通是正弦的,这就意味着电动势是正弦的。梯形模型假设永磁体的绕组分布和磁通产生三个梯形反电动势波形。
PMSM在发电机或电机模式下运行。操作模式由机械转矩的符号决定(电机模式为正,发电机模式为负)。机器的电气部分和机械部分分别由二阶状态空间模型表示。
2. 模块参数配置
在Matlab2021b中,PMSM的模型设置对话框中,包含了两个部分:Configuration(配置)、Parameters (参数设置)。下面将对每个部分进行详细介绍。
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章



















 788
788

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











