







小型无人机理论与应用学习笔记:第1章小型无人机系统架构
0 开篇
闲暇之余开始学习RANDEL W.BEARD等人写的《Small Umanned Aircraft Theory and Practice》,中文版《小型无人机理论及应用》由王强、沈自才等人翻译。做好笔记,希望能够坚持下去。
(相关资源:https://github.com/byu-magicc/mavsim_public/blob/main/README.md)
注:文章部分图片来自英文原版书PDF
1 小型无人机系统架构
书中介绍两种无人机系统架构,区别是航线生成方式,一种是基于路径规划(path planner)算法生成航线(典型的基于直线与弧线的Dubins路径),需要基于先验知识的地图信息,包括目标位置、障碍区域描述等;一种是基于视觉的制导(vision based guidance)算法(书中主要包括地理定位geolocation和基于视觉的着陆)。
1.1 基于路径规划的框架
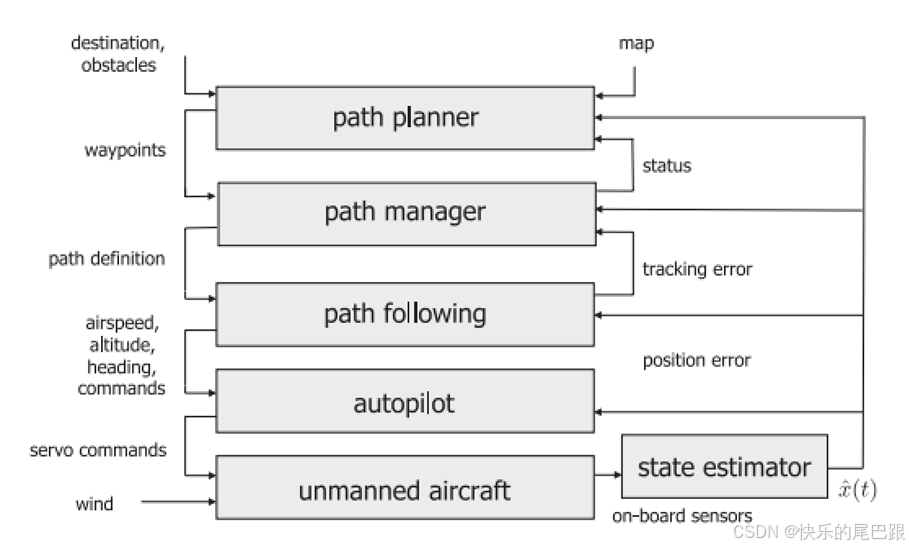
模型解释:
a) unmanned aircraft
无人机模型,主要包括六自由度模型、空气动力学模型、重力模型、推力模型以及分干扰。
b) state estimator
状态估计器,依赖传感器:加速度计,速率陀螺,压力传感器,磁力计、GPS。
c)au
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 152
152

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









