







2 坐标系
2.1 建立多个坐标系的原因
a)运动学方程在惯性系建立,但是在机体系描述运动更方便;
b) 空气动力和力矩施加于飞机本身,更容易在机体系描述;
c)加速度计、陀螺相对机体坐标系测量,GPS相对于惯性系测量位置、对地速度和航线角;
d)大多数任务需要的徘徊点、飞行轨迹等信息都是在惯性系中规定,此外,地图信息也在惯性系输出。
2.2 旋转矩阵
为了解决矢量在不同坐标系中的表达,需要定义不同坐标系之间的变换关系,坐标系旋转是其中一种方法,任意直角坐标系可用通过另一直角坐标系绕坐标轴的旋转最多3次获得。旋转矩阵的推导过程书里讲得很清楚,这里讲个记忆旋转矩阵的方法:
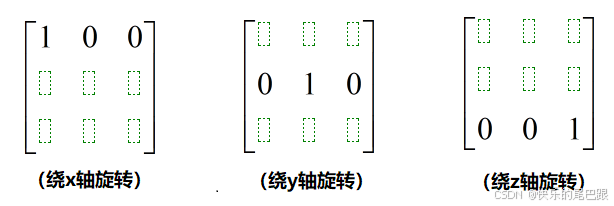
a)绕哪个轴旋转,先在旋转矩阵(3X3)对角线上相应位置填1,该行其余位置填0,例如绕x轴旋转,将1行1列填1,1行2列、1行3列填0。如绕y轴旋转,则将2行2列填1,以此类推。
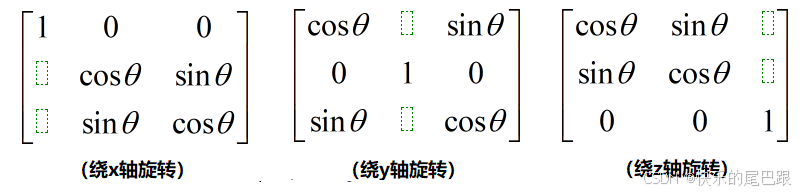
b)除去1所在的行列,按[cos sin;sin cos]的顺序填写
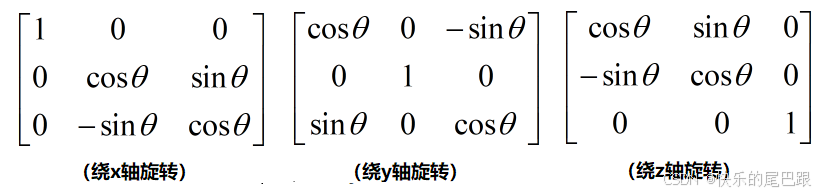
c)将1所在行的上一行中sin置为-sin(记忆时,第1行的上1行为第3行),并将其余空位置0,得到最终绕某个坐标轴右手旋转的旋转矩阵
上面旋转矩阵应用于坐标系旋转,根据运动的相对性,若想表达矢量在同一坐标系下绕某个轴旋转,完全可以套用上面的旋转矩阵,只是矢量旋转时需将旋转矩阵中的 θ \theta θ加个负号。
2.3 小型无人机坐标系
之所以强调小型无人机,根本的区别就在于惯性坐标系的定义,由于小型无人机航程短,可以忽略地球自转,视地面为平面,因此近似认为地面坐标系为惯性系。
2.3.1 惯性坐标系 F i F^i Fi
惯性系(北东地)是与地球固连坐标系,其原点为地面一点,x轴指向正北,y轴指向正东,z轴指向地心。
2.3.2 飞机(运动)坐标系 F v F^v Fv
飞机坐标系原点是无人机质心,x轴指向正北,y轴指向正东,z轴指向地心。
2.3.3 机体坐标系 F b F^b Fb
机体坐标系原点是无人机质心,x轴指向飞机头部,y轴指向右翼,z轴指向机腹满足右手定则。
2.3.4 风轴(速度)坐标系 F w F^w Fw
速度系原点是无人机质心,x轴指向空速va方向,z轴位于飞机对称面内垂直x轴指向下,y轴垂直于x和z指向右。
2.4 几个重要的角度
根据不同坐标系之间的变换过程,引入几个重要的角度概念。
2.3.1 飞机坐标系 F v F^v Fv->机体坐标系 F b F^b Fb
引入三个欧拉角,偏航角 ψ \psi ψ(heading angle/yaw )、俯仰角 θ \theta θ(pitch angle )、滚动角 ϕ \phi ϕ(roll angle ),飞机坐标系 F v F^v Fv->机体坐标系 F b F^b Fb坐标系的变换,需要遵循如下顺序:
a)先绕飞机坐标系的z轴旋转偏航角 ψ \psi ψ;
b)再绕得到的新坐标系的y轴旋转俯仰角 θ \theta θ;
c)最后再绕得到的新坐标系的x轴旋转滚动角 ϕ \phi ϕ。
方便记忆, F v F^v F
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 813
813

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









