






三维重建(3D Reconstruction)
用相机拍摄真实世界的物体、场景,并通过计算机技术进行处理得到物体的三维模型。主要包含一下技术:多视图立体几何、深度图估计、点云处理、网格重建与优化、纹理贴图、马尔可夫随机场、图割等等。三维重建是增强现实(AR)、混合现实(MR)、机器人导航、自动驾驶等领域的核心技术之一。

传统方法
基于RGB-D的重建
深度相机(RGBD Camera):可以直接获取被测对象的三维信息(深度图)的相机。深度相机主要分为结构光和ToF:目前比较主流的是ToF相机。
基于MVS的重建
MVS:从一系列RGB图像中重建3D模型(刚体重建),包含图像采集、特征提取与匹配、位姿计算、稀疏点云重建、稠密点云重建、网格重建,纹理贴图。
经典开源框架:
位姿计算:COLMAP、MVE、OpenMVG、Slam等等
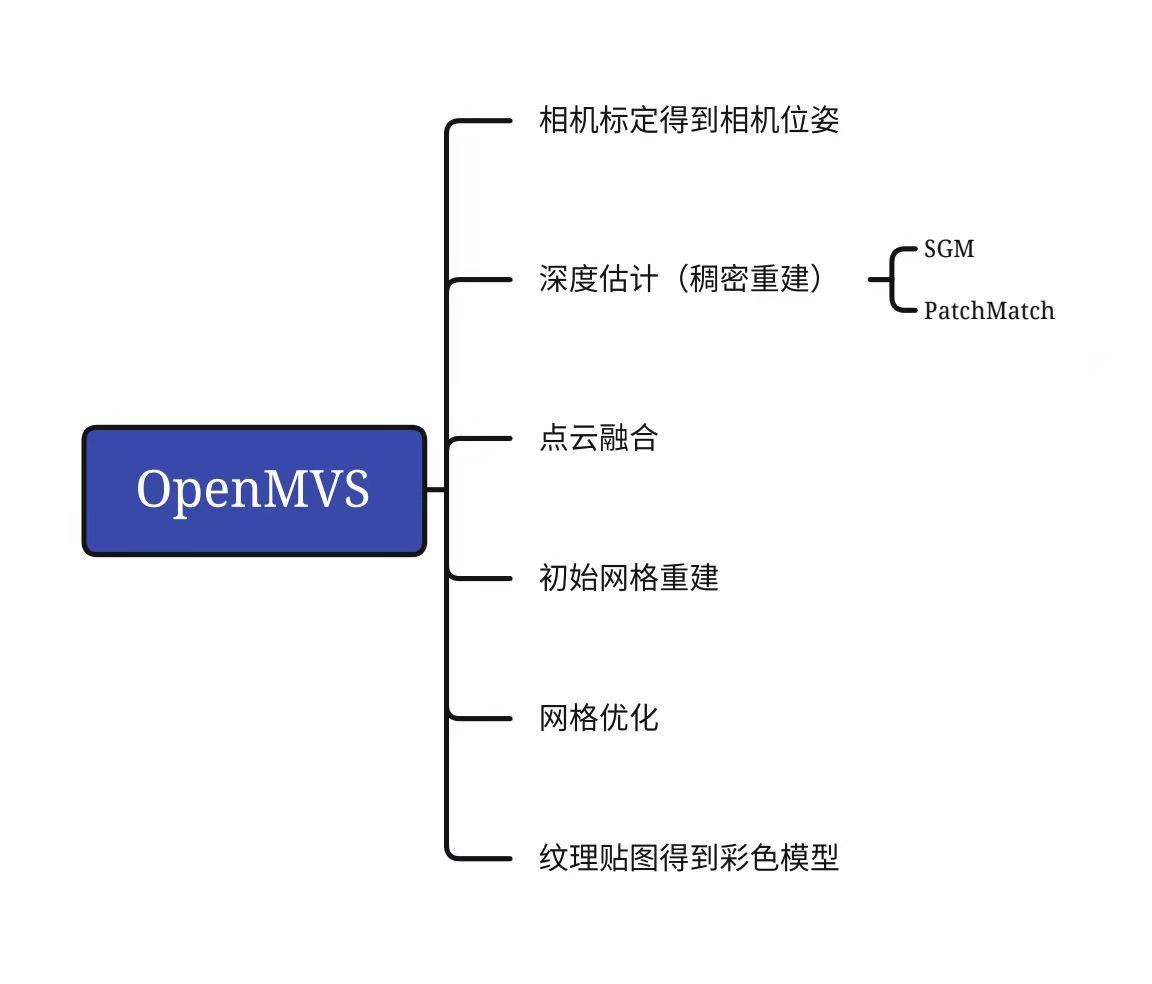
MVS:COLMAP、MVE、PMVS、SMVS、OpenMVS等等
目前较好的方案是 :COLMAP(计算位姿)+OpenMVS(三维重建)
经典论文:综述: Multi-View Stereo:A Tutorial
MVS开源框架测评:Thanks and Temples:Benchmarking Large-Scale Scene Reconstruction
COLMAP
COLMAP-SFM:

基于深度学习的方法
单帧图像重建Mesh
人脸重建
基于3DMM重建
论文:
- Nonlinear 3D Face Morphable
线性模型,可形变模型,任何一张人脸都可以根据一下公式来重建,基于统计学原理,任何一个人脸都可以由多个标准人脸的特征(形状、纹理、表情)线性组合得到。 - On Learning 3D Face Morphable Model from In-the-wild Images
非线性模型,学习了一个非线性的3DMM模型,比传统的线性模型具有更大的表示能力;采用了弱监督学习的方式,利用大量没有三维扫描的二维图像,共同学习模型和模型拟合的方法。 - 2DASL
自监督模型,克服数据不足的问题。 - PRNet
端到端重建的方式解决人脸对齐与三维人脸问题,使其一起完成,且不受到低维空间的限制,运行速度快。
物体、人体重建
- IF-Nets
- PIFu
多帧图像重建深度图

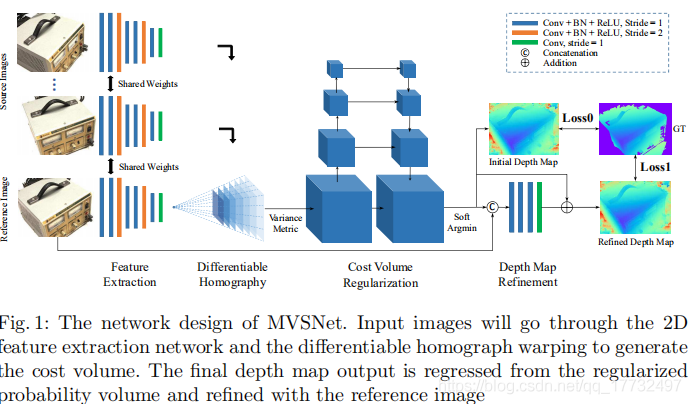
1.MVSNet
网络结构输入是任意位姿的多张图像,且多张图片之间的关系需要被整体考虑
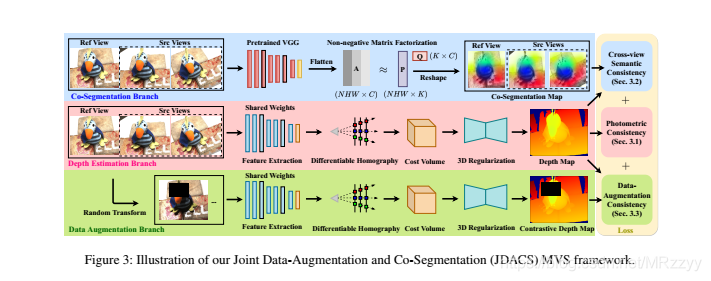
2. MVS-JDACS-MS(Self-supervised Multi-view Stereo via Effective Co-Segmentation and Data-Augmentation)
**特点:**在无监督训练框架中引入协同分割和数据增强策略,克服不同视角之间天然存在的关照差异性等干扰。
3. PatchMatchNet
**网络结构:**一种基于传统的PatchMatch算法的高效multi-view stereo框架





















 935
935











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











