







多传感器融合定位 第二章 3D激光里程计
参考博客:
参考代码:
代码下载 : https://github.com/kahowang/sensor-fusion-for-localization-and-mapping
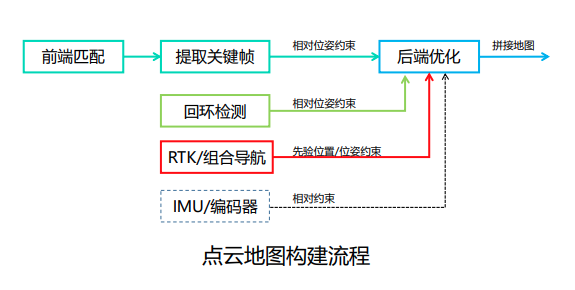
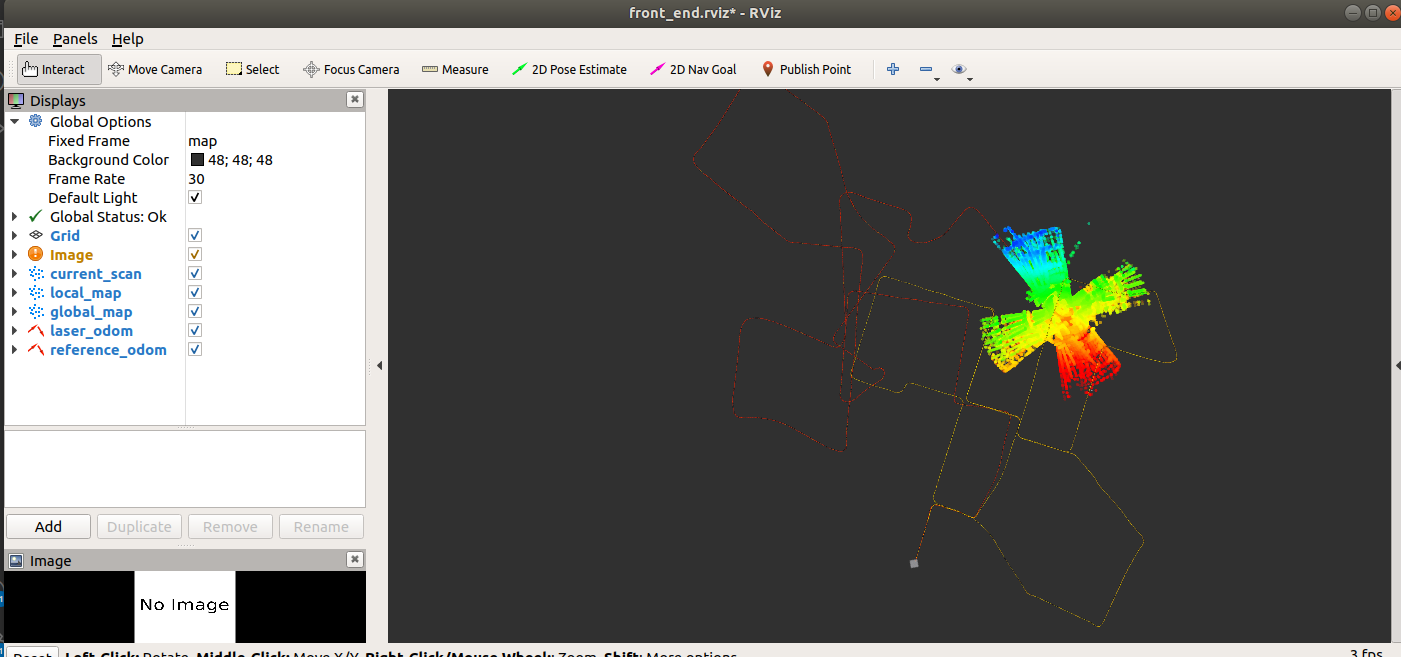
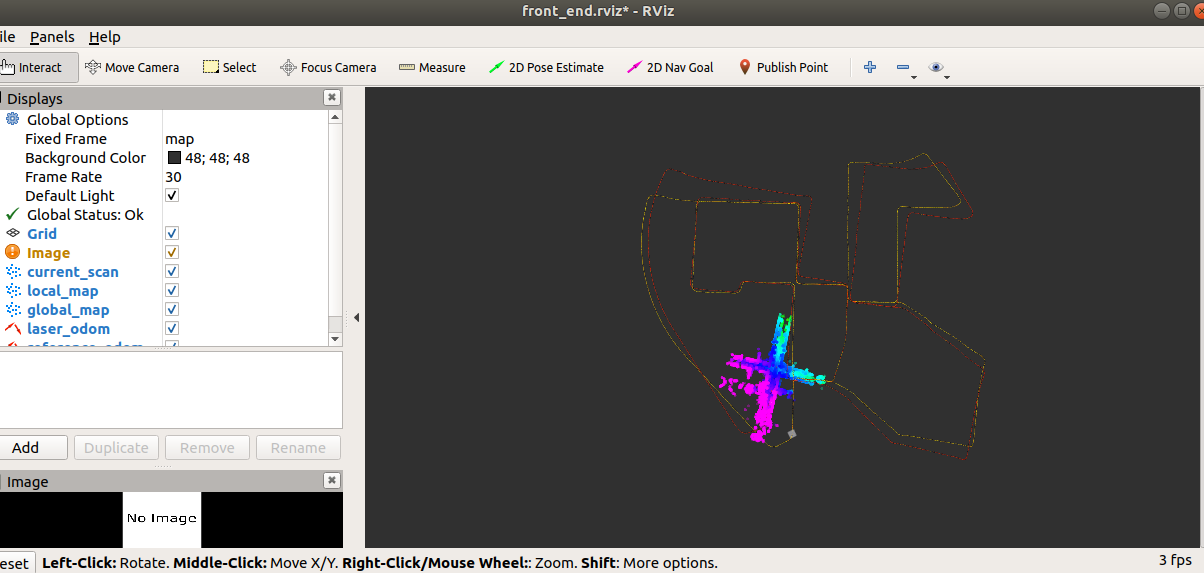
点云地图构建框架
FILE: front_end_flow.cpp
FrontEndFlow::Run()
bool FrontEndFlow::Run() {
if (!ReadData()) { // 获取来自subscribe的原始数据存储在std::deque中,同步各传感器数据
return false;
}
if (!InitCalibration()) { // 获取 lidar_to_imu_ 坐标变换矩阵
return false;
}
if (!InitGNSS()) { // 初始化GNSS 数据
return false;
}
while(HasData()) {
if (!ValidData()) {
continue;
}
UpdateGNSSOdometry(); // 更新GNSS 位置,并通过lidar_to_imu_ 变换到雷达坐标系下
if (UpdateLaserOdometry()) { // 更新激光里程计
PublishData();
SaveTrajectory();
} else {
LOG(INFO) << "UpdateLaserOdometry failed!" << std::endl;
}
}
return true;
}
FrontEndFlow::UpdateLaserOdometry()
bool FrontEndFlow::UpdateLaserOdometry() {
static bool front_end_pose_inited = false;
if (!front_end_pose_inited) {
front_end_pose_inited = true;
front_end_ptr_->SetInitPose(gnss_odometry_);
}
laser_odometry_ = Eigen::Matrix4f::Identity();
return front_end_ptr_->Update(current_cloud_data_, laser_odometry_);
}
FrontEnd::Update()
更新里程计
bool FrontEnd::Update(const CloudData& cloud_data, Eigen::Matrix4f& cloud_pose) {
current_frame_.cloud_data.time = cloud_data.time;
std::vector<int> indices;
pcl::removeNaNFromPointCloud(*cloud_data.cloud_ptr, *current_frame_.cloud_data.cloud_ptr, indices);
CloudData::CLOUD_PTR filtered_cloud_ptr(new CloudData::CLOUD());
frame_filter_ptr_->Filter(current_frame_.cloud_data.cloud_ptr, filtered_cloud_ptr); // 滤波,选用 pcl::VoxelGrid<CloudData::POINT>
static Eigen::Matrix4f step_pose = Eigen::Matrix4f::Identity();
static Eigen::Matrix4f last_pose = init_pose_;
static Eigen::Matrix4f predict_pose = init_pose_;
static Eigen::Matrix4f last_key_frame_pose = init_pose_;
// 局部地图容器中没有关键帧,代表是第一帧数据
// 此时把当前帧数据作为第一个关键帧,并更新局部地图容器和全局地图容器
if (local_map_frames_.size() == 0) {
current_frame_.pose = init_pose_; // 局部地图第一帧作为predict_pose 先验用
UpdateWithNewFrame(current_frame_);
cloud_pose = current_frame_.pose;
return true;
}
// 不是第一帧,就正常匹配
registration_ptr_->ScanMatch(filtered_cloud_ptr, predict_pose, result_cloud_ptr_, current_frame_.pose);
cloud_pose = current_frame_.pose;
// 更新相邻两帧的相对运动
step_pose = last_pose.inverse() * current_frame_.pose;
predict_pose = current_frame_.pose * step_pose; // 更新预测位姿
last_pose = current_frame_.pose;
// 匹配之后根据距离判断是否需要生成新的关键帧,如果需要,则做相应更新
if (fabs(last_key_frame_pose(0,3) - current_frame_.pose(0,3)) +
fabs(last_key_frame_pose(1,3) - current_frame_.pose(1,3)) +
fabs(last_key_frame_pose(2,3) - current_frame_.pose(2,3)) > key_frame_distance_) {
UpdateWithNewFrame(current_frame_);
last_key_frame_pose = current_frame_.pose;
}
return true;
}
ICP_SVD
Funtion
FILE: icp_svd_registration.cpp
scanMatch()
bool ICPSVDRegistration::ScanMatch(
const CloudData::CLOUD_PTR& input_source,
const Eigen::Matrix4f& predict_pose,
CloudData::CLOUD_PTR& result_cloud_ptr,
Eigen::Matrix4f& result_pose
) {
input_source_ = input_source;
// pre-process input source:
CloudData::CLOUD_PTR transformed_input_source(new CloudData::CLOUD());
pcl::transformPointCloud(*input_source_, *transformed_input_source, predict_pose);
// init estimation:
transformation_.setIdentity();
//
// TODO: first option -- implement all computing logic on your own
//
// do estimation:
int curr_iter = 0;
while (curr_iter < max_iter_) {
// TODO: apply current estimation:
// apply current estimation:
CloudData::CLOUD_PTR curr_input_source(new CloudData::CLOUD());
pcl::transformPointCloud(*transformed_input_source, *curr_input_source, transformation_);
// TODO: get correspondence:
std::vector<Eigen::Vector3f> xs;
std::vector<Eigen::Vector3f> ys;
// TODO: do not have enough correspondence -- break:
if (GetCorrespondence(curr_input_source,xs,ys) < 3) // 寻找最邻近点的点对,当匹配点少于3个退出
break;
// TODO: update current transform:
Eigen::Matrix4f delta_transformation;
GetTransform(xs, ys, delta_transformation);
// TODO: whether the transformation update is significant:
if(!IsSignificant(delta_transformation, trans_eps_)) // 最大旋转矩阵
break;
// TODO: update transformation:
transformation_ = delta_transformation * transformation_;
++curr_iter;
}
// set output:
result_pose = transformation_ * predict_pose;
// 归一化
Eigen::Quaternionf qr(result_pose.block<3,3>(0,0));
qr.normalize();
Eigen::Vector3f t = result_pose.block<3,1>(0,3);
result_pose.setIdentity();
result_pose.block<3,3>(0,0) = qr.toRotationMatrix();
result_pose.block<3,1>(0,3) = t;
pcl::transformPointCloud(*input_source_, *result_cloud_ptr, result_pose);
return true;
}
GetCorrespondence()
通过kdtree 寻找两片点云的匹配点
size_t ICPSVDRegistration::GetCorrespondence(
const CloudData::CLOUD_PTR &input_source,
std::vector<Eigen::Vector3f> &xs,
std::vector<Eigen::Vector3f> &ys
) {
const float MAX_CORR_DIST_SQR = max_corr_dist_ * max_corr_dist_;
size_t num_corr = 0;
// TODO: set up point correspondence
for(size_t i =0; i < input_source->points.size(); ++i){
std::vector<int> corr_ind; // index
std::vector<float> corr_sq_dis; // correspondence_square_dis
input_target_kdtree_->nearestKSearch(
input_source->at(i),
1,
corr_ind, corr_sq_dis
); // kdtree 搜索
if(corr_sq_dis.at(0) > MAX_CORR_DIST_SQR)
continue;
// add correspondence:
Eigen::Vector3f x(
input_target_->at(corr_ind.at(0)).x,
input_target_->at(corr_ind.at(0)).y,
input_target_->at(corr_ind.at(0)).z
);
Eigen::Vector3f y(
input_source->at(i).x,
input_source->at(i).y,
input_source->at(i).z
);
xs.push_back(x);
ys.push_back(y);
++num_corr;
}
return num_corr;
}
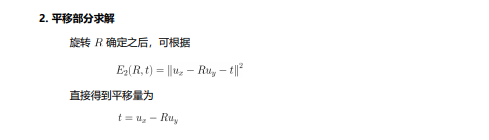
GetTransform()
公式:
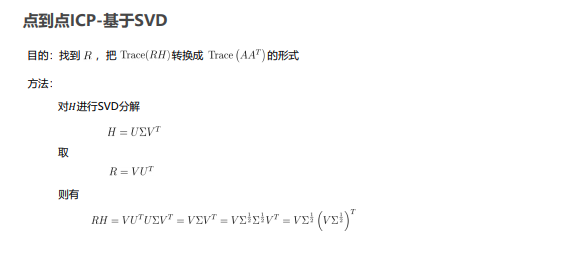
通过Eigen svd求解 R t,
注意:求出的旋转矩阵必须满足是正交阵并且行列式为1,因此,需要对求出的旋转矩阵进行正交化.
1.旋转矩阵转四元数,对四元数进行归一化。
2.SO3流形投影。
3.SVD分解奇异值置1。
void ICPSVDRegistration::GetTransform(
const std::vector<Eigen::Vector3f> &xs,
const std::vector<Eigen::Vector3f> &ys,
Eigen::Matrix4f &transformation_
) {
const size_t N = xs.size();
// find centroids of mu_x and mu_y:
Eigen::Vector3f mu_x = Eigen::Vector3f::Zero();
Eigen::Vector3f mu_y = Eigen::Vector3f::Zero();
for (size_t i = 0; i < N; ++i) {
mu_x += xs.at(i);
mu_y += ys.at(i);
}
mu_x /= N;
mu_y /= N;
// build H:
Eigen::Matrix3f H = Eigen::Matrix3f::Zero();
for (size_t i = 0; i < N; ++i) {
H += (ys.at(i) - mu_y) * (xs.at(i) - mu_x).transpose();
}
// solve R:
Eigen::JacobiSVD<Eigen::MatrixXf> svd(H, Eigen::ComputeThinU | Eigen::ComputeThinV);
Eigen::Matrix3f R = svd.matrixV() * svd.matrixU().transpose();
// solve t:
Eigen::Vector3f t = mu_x - R * mu_y;
// set output:
transformation_.setIdentity();
transformation_.block<3, 3>(0, 0) = R;
transformation_.block<3, 1>(0, 3) = t;
}
SVD_ICP参数配置
FILE:front_end/config.yaml
trick: 参数设置,icp_svd 主要修改
max_corr_dist: SVD_ICP 的精度比较依赖与临近点对的准确度,比如将临近点对的距离阈值设置尽可能小,比如0.5
max_iter: 一般来说,迭代次数越多越好,当然必然会徒增不必要的算力负担,因为ICP_SVD是一步求解,所以迭代次数可以尽不用太大。
ICP_SVD:
max_corr_dist : 0.5
trans_eps : 0.01
euc_fitness_eps : 0.36
max_iter : 10
NDT_CPU
参考源码: autoware ndt_cpu
FILE: include/models/ndt_cpu/ndt_cpu_registration.hpp
#ifndef LIDAR_LOCALIZATION_MODELS_REGISTRATION_NDT_CPU_REGISTRATION_HPP_
#define LIDAR_LOCALIZATION_MODELS_REGISTRATION_NDT_CPU_REGISTRATION_HPP_
#include "lidar_localization/models/registration/registration_interface.hpp"
#include "lidar_localization/models/registration/ndt_cpu/NormalDistributionsTransform.h"
namespace lidar_localization {
class NDTCPURegistration: public RegistrationInterface { // 继承点云配准的基类
public:
NDTCPURegistration(const YAML::Node& node);
bool SetInputTarget(const CloudData::CLOUD_PTR& input_target) override;
bool ScanMatch(
const CloudData::CLOUD_PTR& input_source,
const Eigen::Matrix4f& predict_pose,
CloudData::CLOUD_PTR& result_cloud_ptr,
Eigen::Matrix4f& result_pose
) override;
private:
bool SetRegistrationParam(float res, float step_size, float trans_eps, int max_iter);
private:
cpu::NormalDistributionsTransform<CloudData::POINT, CloudData::POINT> ndt_cpu_; // 实例化cpu_ndt 对象
};
} // namespace lidar_localization
#endif
FILE: src/models/registration/ndt_cpu/ndt_cpu_registration.cpp
/*
* @Description: NDT CPU lidar odometry
* @Author: KaHo
* @Date: 2021-8-22
*/
#include <pcl/common/transforms.h>
#include <Eigen/Dense>
#include "glog/logging.h"
#include "lidar_localization/models/registration/ndt_cpu/ndt_cpu_registration.hpp"
namespace lidar_localization{
NDTCPURegistration::NDTCPURegistration(const YAML::Node& node){
float res = node["res"].as<float>();
float step_size = node["step_size"].as<float>();
float trans_eps = node["trans_eps"].as<float>();
int max_iter = node["max_iter"].as<int>();
SetRegistrationParam(res, step_size, trans_eps, max_iter);
}
bool NDTCPURegistration::SetRegistrationParam(float res, float step_size, float trans_eps, int max_iter) {
ndt_cpu_.setResolution(res);
ndt_cpu_.setStepSize(step_size);
ndt_cpu_.setTransformationEpsilon(trans_eps);
ndt_cpu_.setMaximumIterations(max_iter);
LOG(INFO) << "NDT params:" << std::endl
<< "res: " << res << ", "
<< "step_size: " << step_size << ", "
<< "trans_eps: " << trans_eps << ", "
<< "max_iter: " << max_iter
<< std::endl << std::endl;
return true;
}
bool NDTCPURegistration::SetInputTarget(const CloudData::CLOUD_PTR& input_target) {
ndt_cpu_.setInputTarget(input_target);
return true;
}
bool NDTCPURegistration::ScanMatch(const CloudData::CLOUD_PTR& input_source,
const Eigen::Matrix4f& predict_pose,
CloudData::CLOUD_PTR& result_cloud_ptr,
Eigen::Matrix4f& result_pose) {
ndt_cpu_.setInputSource(input_source);
ndt_cpu_.align(*result_cloud_ptr, predict_pose);
result_pose = ndt_cpu_.getFinalTransformation(); // 匹配后的点云
return true;
}
}
NDT_CPU 参数配置
NDT_CPU:
res : 0.8 # volex resolution
step_size : 0.1 # 梯度下降的步长,越大下降越快,但是容易over shoot陷入局部最优
trans_eps : 0.01 # 最大容差,一旦两次转换矩阵小于 trans_eps 退出迭代
max_iter : 30 # 最大迭代次数
ICP_PCL
FILE: icp_registration.cpp
private:
pcl::IterativeClosestPoint<CloudData::POINT, CloudData::POINT>::Ptr icp_ptr_;
bool ICPRegistration::SetInputTarget(const CloudData::CLOUD_PTR& input_target) {
icp_ptr_->setInputTarget(input_target);
return true;
}
bool ICPRegistration::ScanMatch(const CloudData::CLOUD_PTR& input_source,
const Eigen::Matrix4f& predict_pose,
CloudData::CLOUD_PTR& result_cloud_ptr,
Eigen::Matrix4f& result_pose) {
icp_ptr_->setInputSource(input_source); // 输入待配准点云
icp_ptr_->align(*result_cloud_ptr, predict_pose); // 配准
result_pose = icp_ptr_->getFinalTransformation(); // 获取变换矩阵
return true;
}
NDT_PCL
FILE: ndt_registration.cpp
private:
pcl::NormalDistributionsTransform<CloudData::POINT, CloudData::POINT>::Ptr ndt_ptr_;
bool NDTRegistration::SetInputTarget(const CloudData::CLOUD_PTR& input_target) {
ndt_ptr_->setInputTarget(input_target);
return true;
}
bool NDTRegistration::ScanMatch(const CloudData::CLOUD_PTR& input_source,
const Eigen::Matrix4f& predict_pose,
CloudData::CLOUD_PTR& result_cloud_ptr,
Eigen::Matrix4f& result_pose) {
ndt_ptr_->setInputSource(input_source);
ndt_ptr_->align(*result_cloud_ptr, predict_pose);
result_pose = ndt_ptr_->getFinalTransformation();
return true;
}
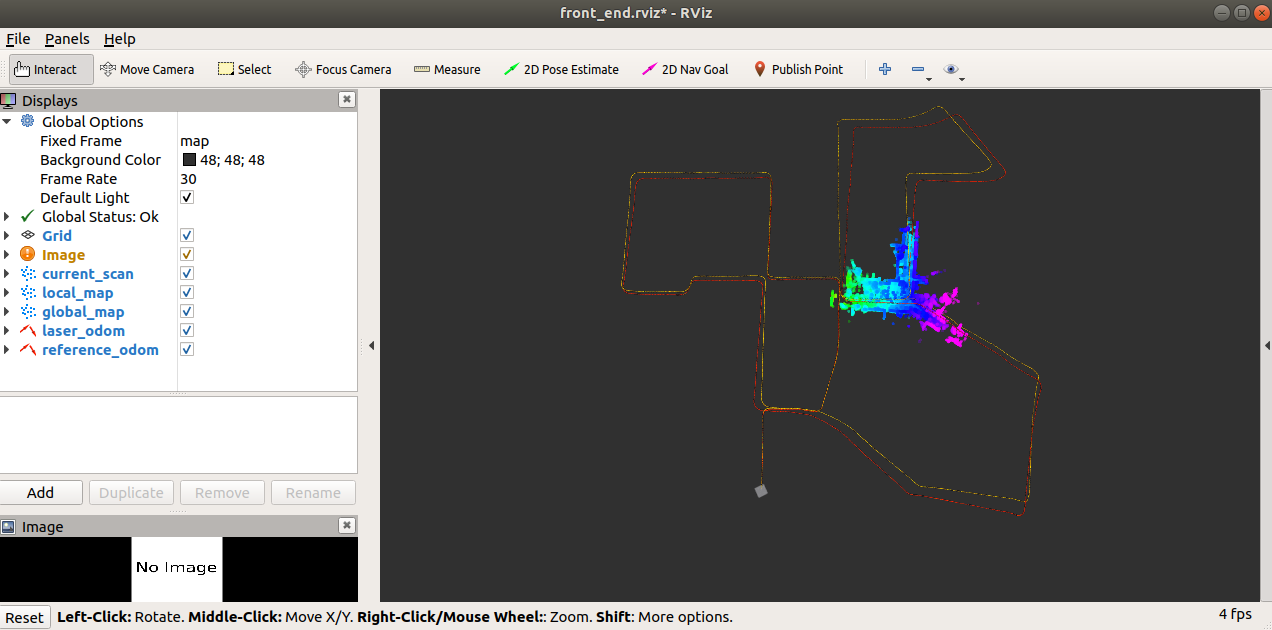
Running
参数配置选择
lidar_localization/config/front_end/config.yaml 选择点云匹配方式和指定数据存放路径
data_path: /home/x/catkin_ws/src/lidar_localization # 数据存放路径
# 匹配
# TODO: implement your custom registration method and add it here
registration_method: ICP_SVD # 选择点云匹配方法,目前支持:ICP, ICP_SVD, NDT, SICP
# 局部地图
key_frame_distance: 2.0 # 关键帧距离
local_frame_num: 20
local_map_filter: voxel_filter # 选择滑窗地图点云滤波方法,目前支持:voxel_filter
# rviz显示
display_filter: voxel_filter # rviz 实时显示点云时滤波方法,目前支持:voxel_filter
# 当前帧
frame_filter: voxel_filter # 选择当前帧点云滤波方法,目前支持:voxel_filter
## 滤波相关参数
voxel_filter:
local_map:
leaf_size: [0.6, 0.6, 0.6]
frame:
leaf_size: [1.3, 1.3, 1.3]
display:
leaf_size: [0.5, 0.5, 0.5]
# 各配置选项对应参数
## 匹配相关参数
ICP:
max_corr_dist : 1.2
trans_eps : 0.01
euc_fitness_eps : 0.36
max_iter : 30
ICP_SVD:
max_corr_dist : 0.5
trans_eps : 0.01
euc_fitness_eps : 0.36
max_iter : 10
NDT:
res : 1.0
step_size : 0.1
trans_eps : 0.01
max_iter : 30
SICP:
p : 1.0
mu : 10.0
alpha : 1.2
max_mu : 1e5
max_icp : 100
max_outer : 100
max_inner : 1
stop : 1e-5
运行建图,保存地图
roslaunch lidar_localization front_end.launch
rosbag play kitti_lidar_only_2011_10_03_drive_0027_synced.bag
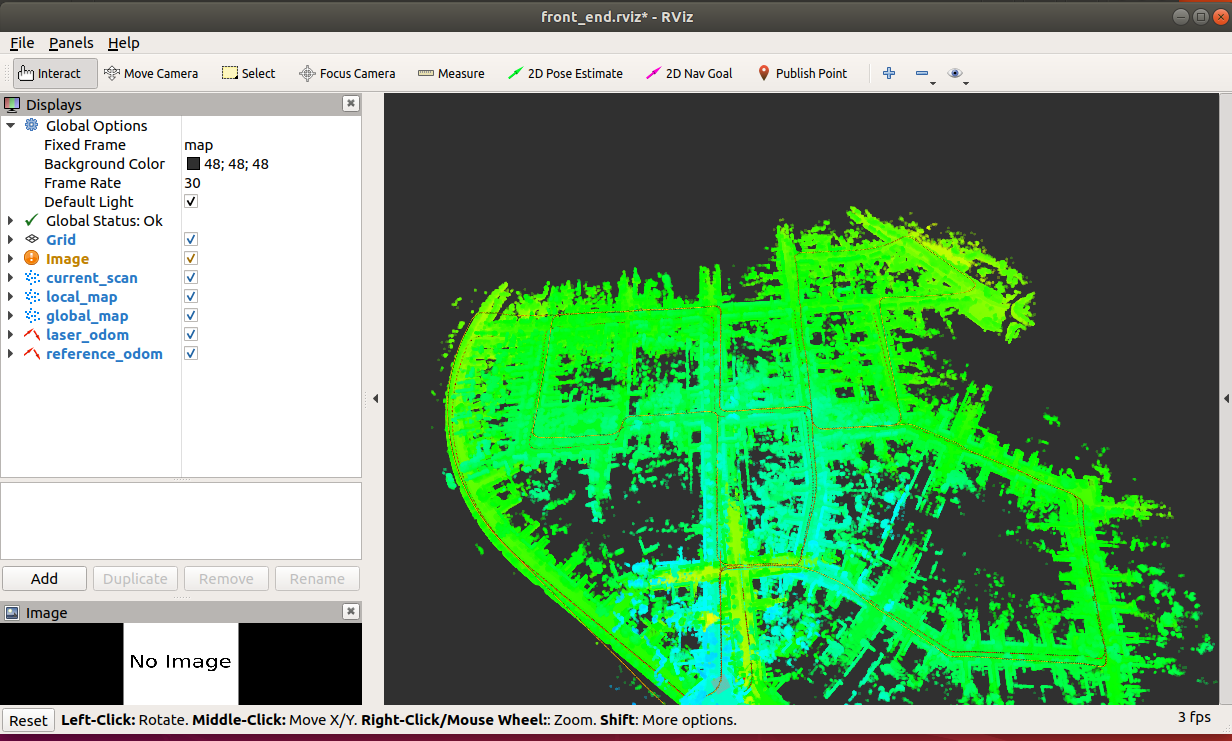
保存地图到 slam_data 文件夹下
rosservice call /save_map
evo轨迹评估
lidar_localization/slam_data/trajectory 路径下有 ground_truth.txt laser_odom.txt 两个文件
下载evo
pip install evo --upgrade --no-binary evo
EVO评价数据有两种模式,对应的指令分别是 evo_rpe 和 evo_ape ,前者评价的是每段距离内的误差,后者评价的是绝对误差随路程的累计。
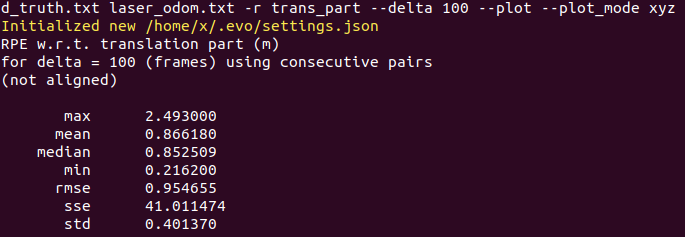
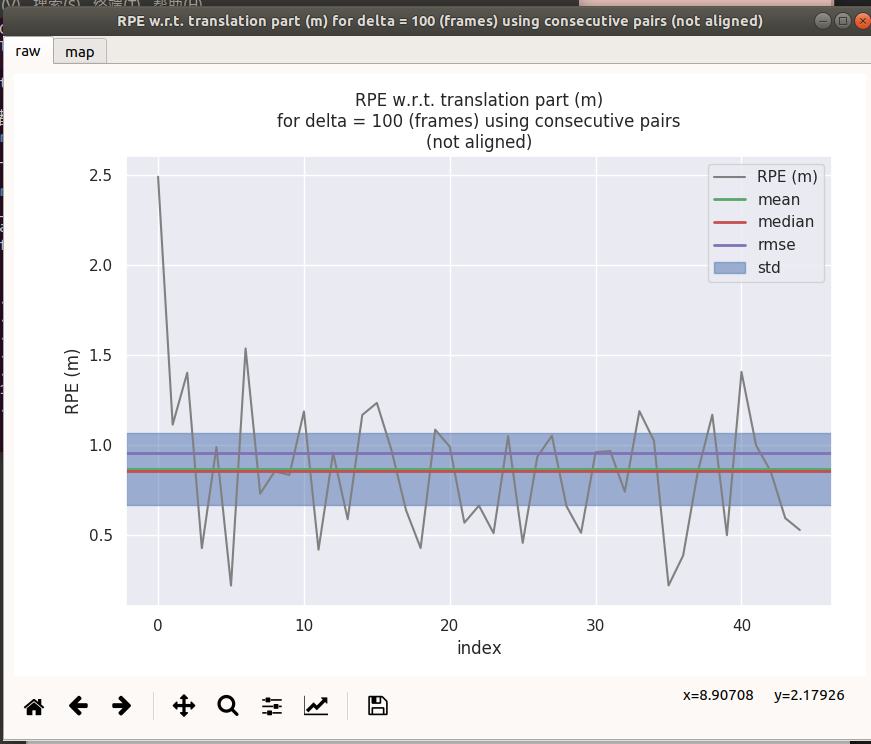
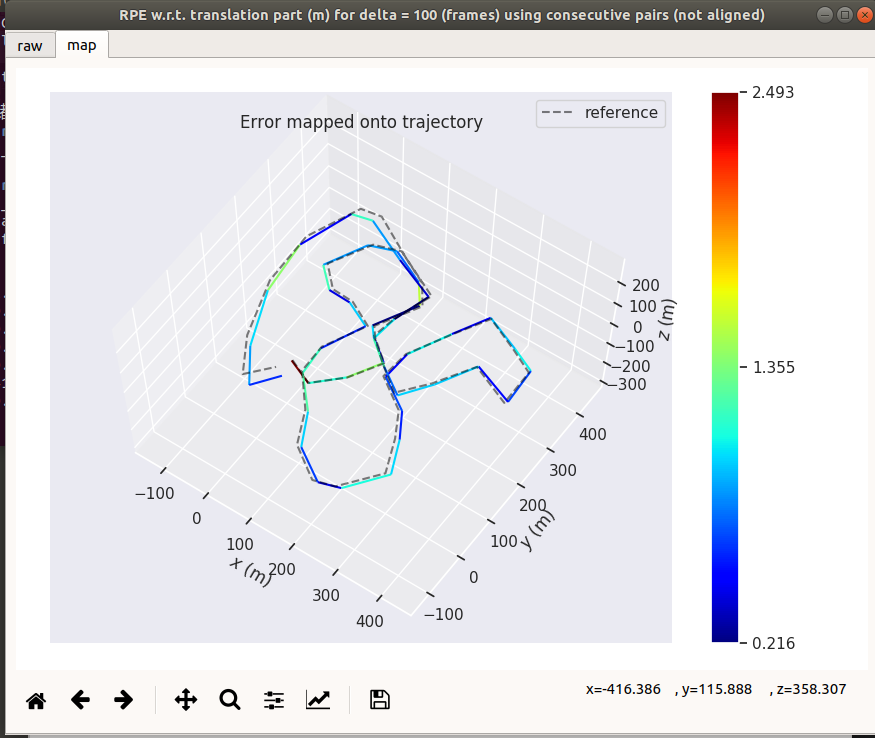
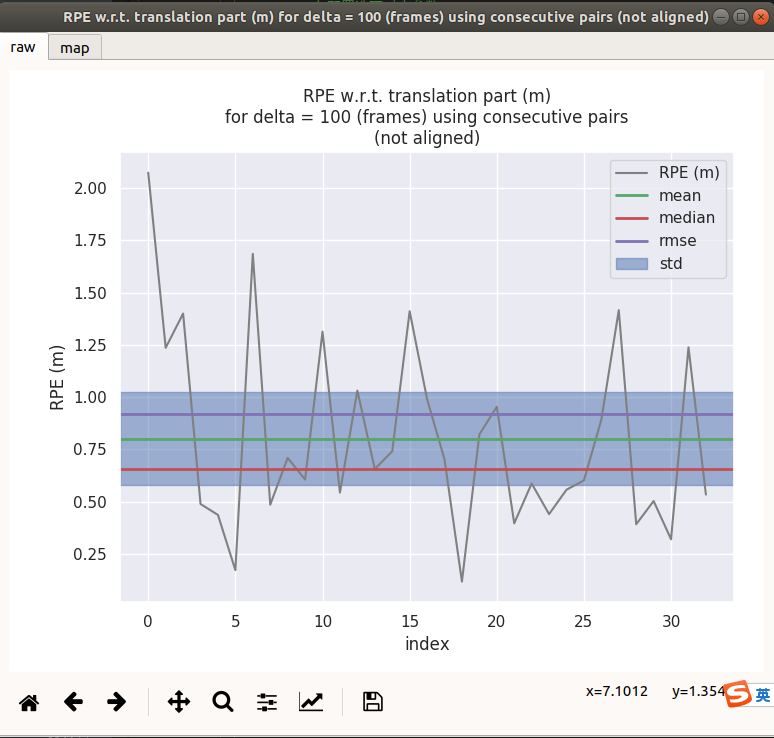
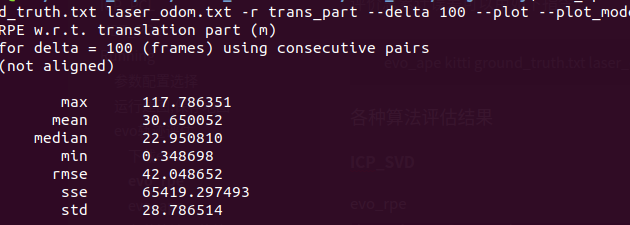
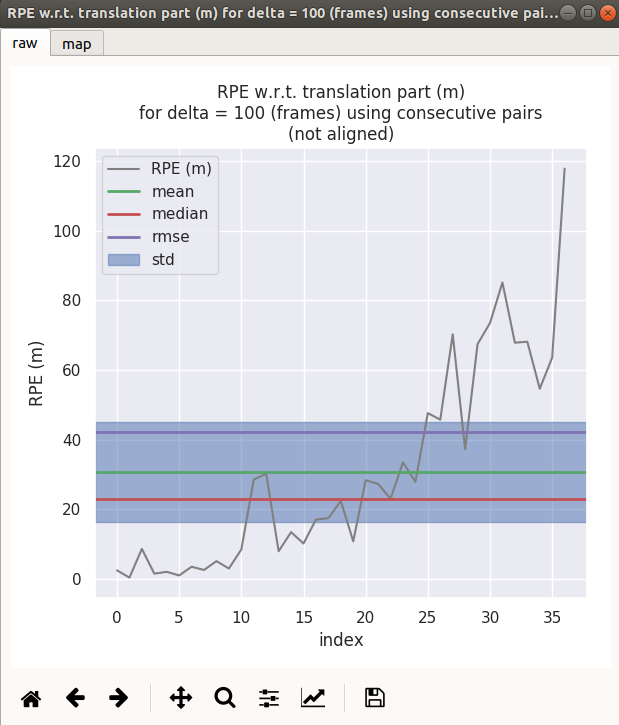
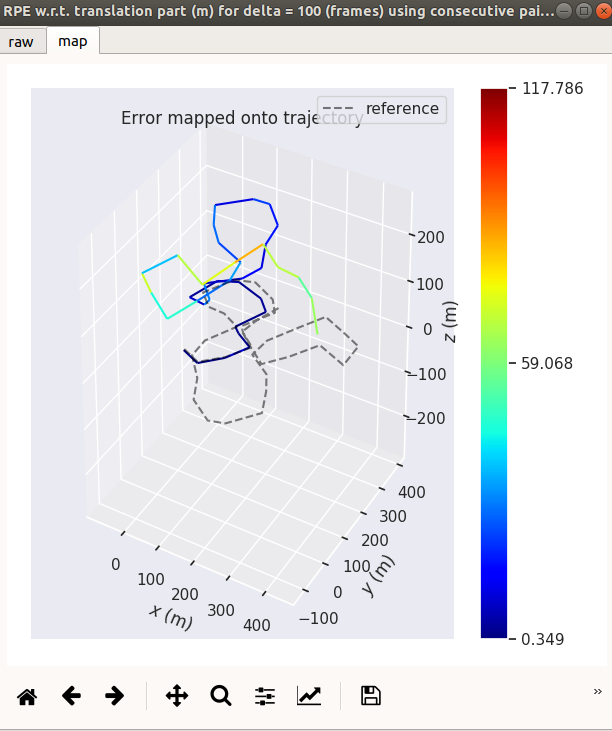
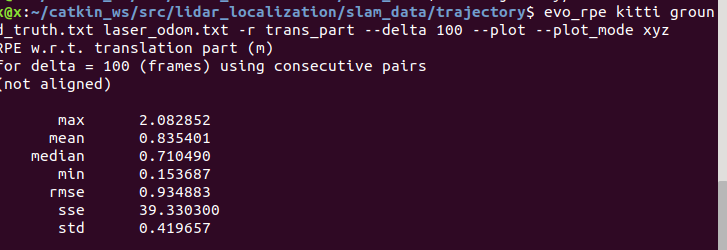
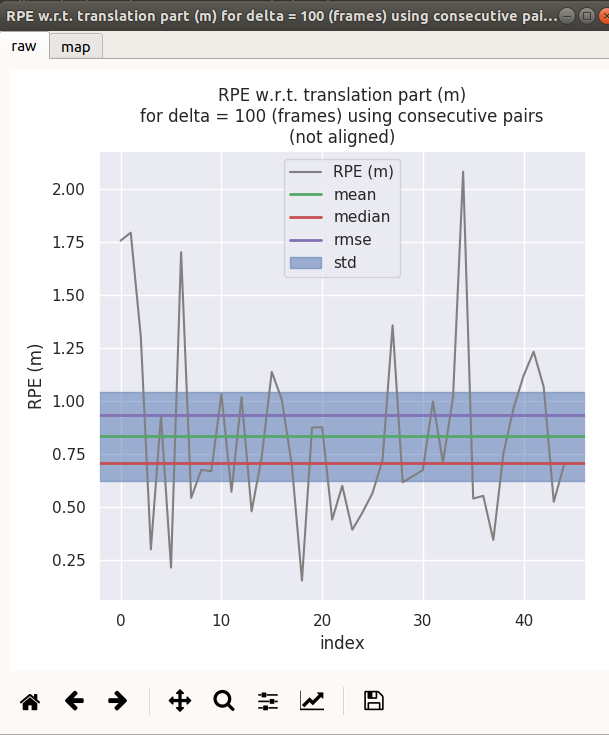
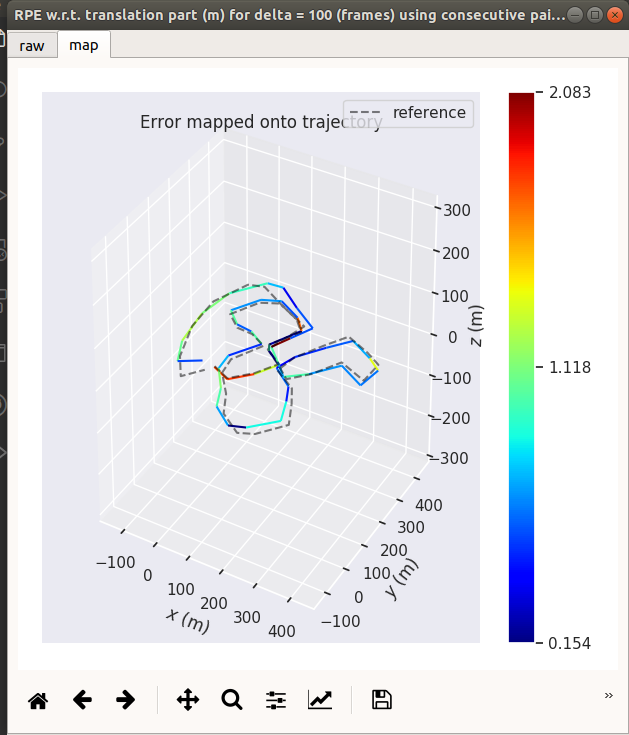
evo_rpe
评价每段距离内的误差可以使用如下指令
evo_rpe kitti ground_truth.txt laser_odom.txt -r trans_part --delta 100 --plot --plot_mode xyz
其中–delta 100表示的是每隔100米统计一次误差,这样统计的其实就是误差的百分比,和kitti的odometry榜单中的距离误差指标就可以直接对应了。
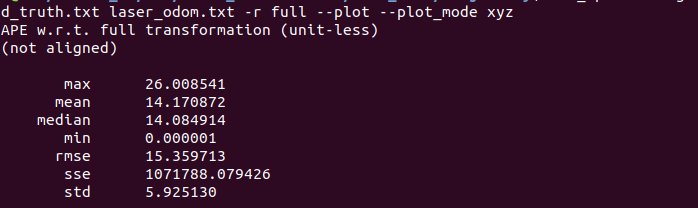
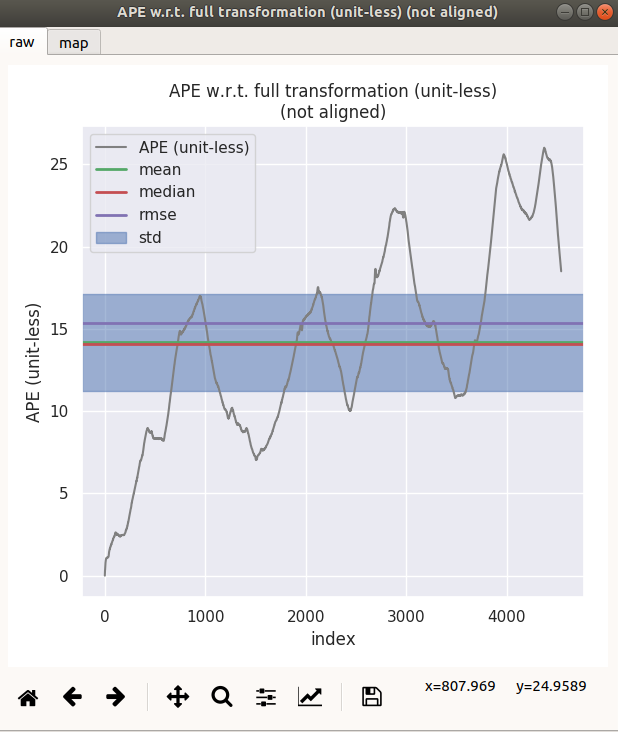
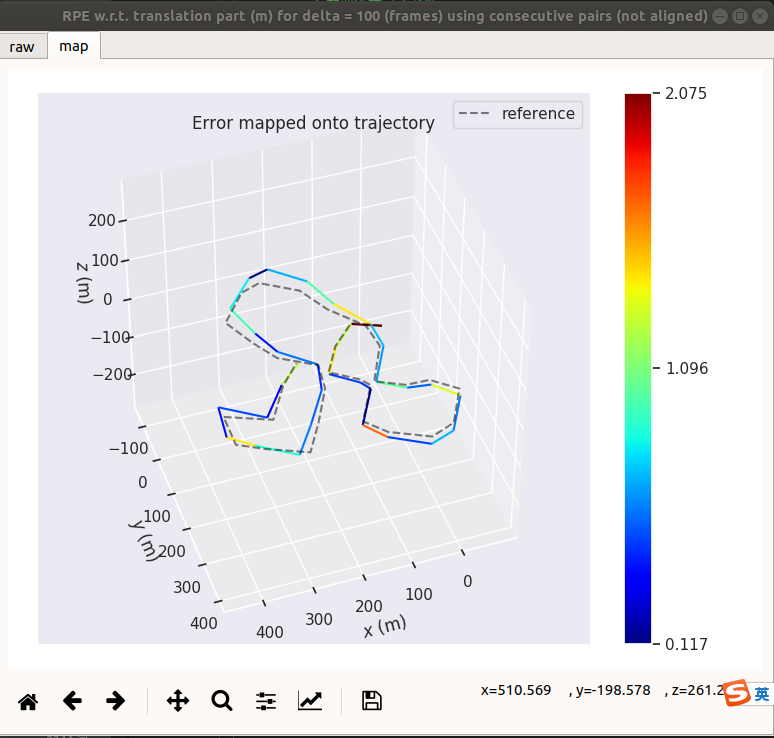
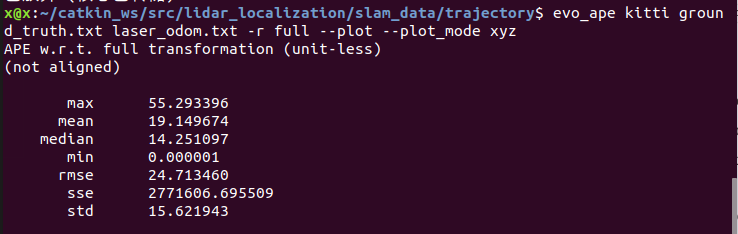
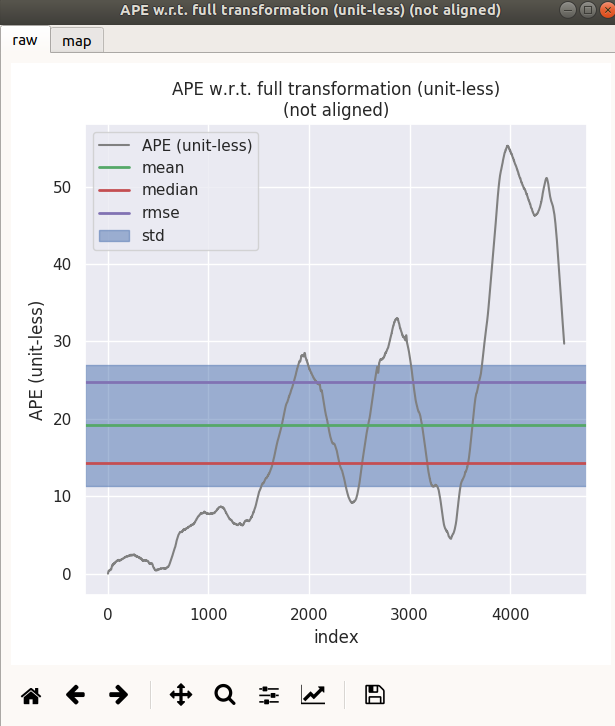
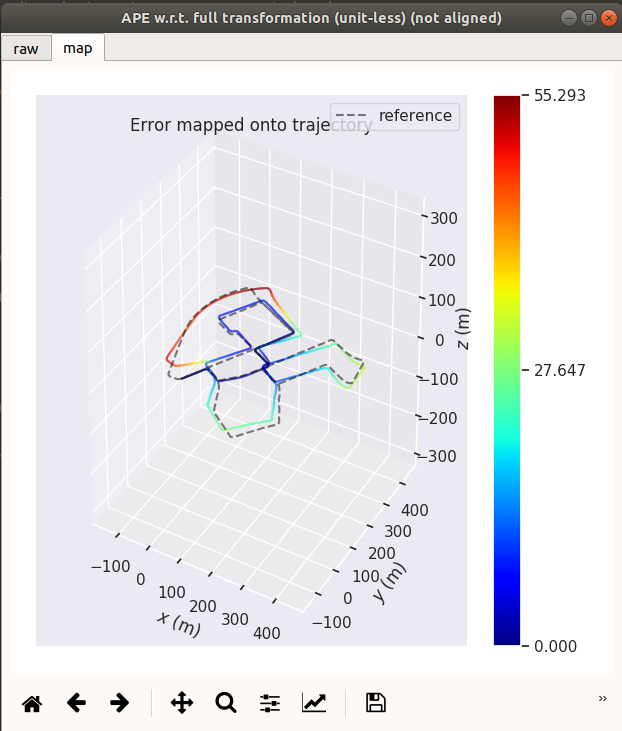
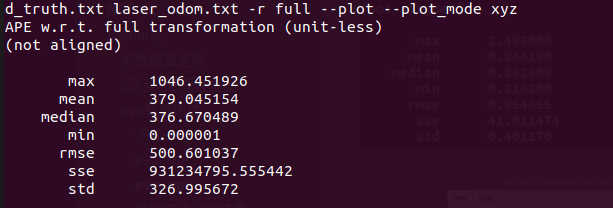
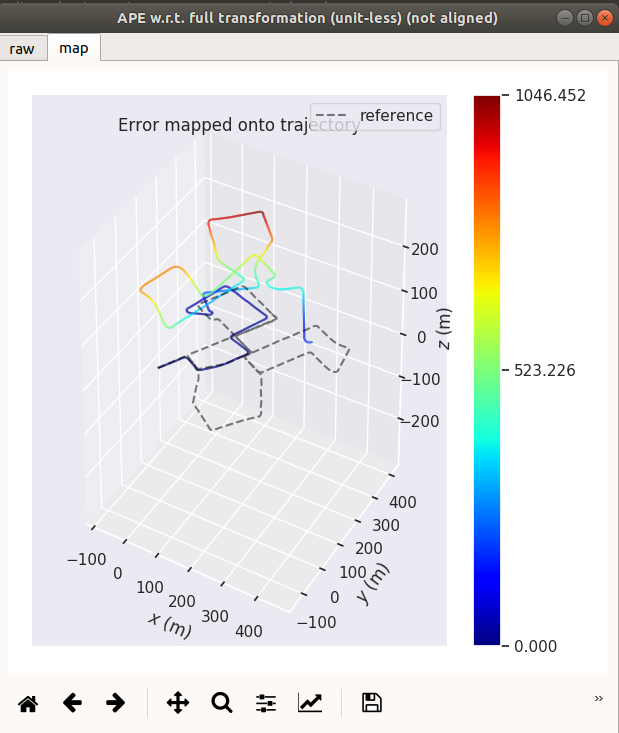
evo_ape
评价总累计误差可以用如下指令
evo_ape kitti ground_truth.txt laser_odom.txt -r full --plot --plot_mode xyz
各种算法评估结果
ICP_SVD
evo_rpe
evo_ape

NDT_CPU
evo_rpe

evo_ape
ICP_PCL
evo_rpe
evo_ape

ICP_NDT
evo_rpe
evo_ape
edited by kaho 2021.8.17














 4071
4071











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









