









预备
VINS整体流程


符号定义
(
⋅
)
w
\left(\cdot\right)^w
(⋅)w表示世界坐标系下的表示,Z轴与重力方向重合。
(
⋅
)
b
\left(\cdot\right)^b
(⋅)b表示体坐标系下的表示,与IMU坐标系绑定。
(
⋅
)
c
\left(\cdot\right)^c
(⋅)c表示相机坐标系下的表示。
q
b
w
q_b^w
qbw和
p
b
w
p_b^w
pbw分别表示imu 体坐标系下转换到世界坐标系下对应的旋转和平移。
q
c
b
q_c^b
qcb和
p
c
b
p_c^b
pcb分别表示相机坐标系下转换到体坐标系下对应的旋转和平移。
(
⋅
)
b
k
\left(\cdot\right)^{b_k}
(⋅)bk 表示第k帧图像对应的体坐标系。
(
⋅
)
c
k
\left(\cdot\right)^{c_k}
(⋅)ck 表示第k帧图像对应的体坐标系。
(
⋅
^
)
\left(\hat{\cdot}\right)
(⋅^)表示带误差的观测值/估计值(带噪声)。
p
ˉ
.
\bar{p}.
pˉ.表示不带尺度的视觉位移估计量。
代码中常用的容器
feature_buf存放feature_tracker_node.cpp发布的特征点信息
imu_buf存放imu_msg
measurements 中配套存放新图像帧特征点信息及其时间戳对应的IMU预积分数据。
IntegrationBase预积分结构体:
result_delta_q/p/v指中值预积分;
jacobian存放预积分变量的雅可比
covariance协方差矩阵。
map<int, vector<pair<int, Eigen::Matrix<double, 7, 1>>>> image:帧特征点属性管理map
每个特征点属性包括:(camera_id,[x,y,z,u,v,vx,vy]),索引为feature_id
xyz_uv_velocity << x, y, z, p_u, p_v, velocity_x, velocity_y;
image[feature_id].emplace_back(camera_id, xyz_uv_velocity);
sfm_f统计各特征点在各帧中的观测。
Matrix3d ric[NUM_OF_CAM];相机到imu体坐标系之间的旋转关系
Vector3d tic[NUM_OF_CAM];相机到imu体坐标系之间的位置关系
Vector3d Ps[(WINDOW_SIZE + 1)];保存滑窗内每帧的位置(以首帧为原点坐标系,imu体坐标系表征位姿)
Vector3d Vs[(WINDOW_SIZE + 1)];保存滑窗内每帧的速度(以首帧为原点坐标系,imu体坐标系表征位姿)
Matrix3d Rs[(WINDOW_SIZE + 1)];保存滑窗内每帧的姿态(以首帧为原点坐标系,imu体坐标系表征位姿)
Vector3d Bas[(WINDOW_SIZE + 1)];滑窗内每帧加速度零偏
Vector3d Bgs[(WINDOW_SIZE + 1)];滑窗内每帧陀螺仪零偏
all_image_frame存放所有图像帧数据(包含了特征点及IMU积分数据)。
通过all_image_frame管理所有帧,通过Ps,Rs等管理滑窗关键帧。
frame_count滑窗内的帧个数。
pre_integrations 存放预积分量,与图像关键帧对应。
Estimator 为VIO结构体,包含各类接口及变量。
FeatureManager f_manager存放管理特征点信息及各类特征点相关接口。
FeaturePerId单个特征点的信息包含了vector<feature_per_frame>即观测到该点的所有帧的观测坐标。
FeatureManager::feature存放所有特征点在被观测帧下的观测坐标i,即list<FeaturePerId>。如下图所示:
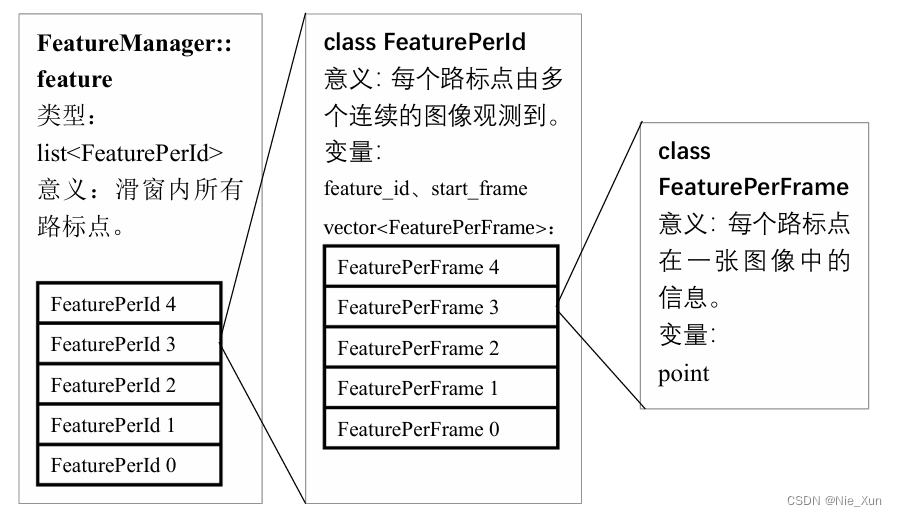
图来自参考文献《VINS 论文推导及代码解析 崔华坤》
初始化原理及步骤
初始化目的
由于单目视觉的尺度信息缺失,采用IMU的位姿积分数据与通过视觉获得的位姿数据及逆行对比,从而估计出尺度信息,从而进一步得到所有特征点的坐标。
然而,完成IMU数据与相机数据的结合,需要知道相机坐标系与IMU坐标系之间的关系(
q
c
b
q_c^b
qcb和
p
c
b
p_c^b
pcb),而此可以通过标定数据或者带IMU相机的工厂参数获得。
通常,相机与IMU之间的角度差异带来的影响较大,而其较小的位置差异对整个里程计的位置估计影响较小,因而,其位置差异
(
p
c
b
)
(p_c^b)
(pcb)可以被忽略。
此外,IMU数据存在零偏(零偏变化),加速度计中包含重力加速度。
初始化原理
初始化原理核心:
通过将相机视觉得到的角度信息与IMU角度信息对比,可以估计陀螺仪零偏,以及在线估计IMU与相机之间的角度差异。
通过将相机视觉得到的位置信息于IMU加速度积分的位置信息进行对比,从而估计出尺度信息,以及修正重力加速度。
初始化步骤
预处理:
(1) 特征点提取。IMU预积分(基于IMU的时间戳)
(2) IMU与图像时间戳对齐与关联
关联:
(3) (若无)则估计外参
VINS初始化:
(4) (视觉无尺度)SFM求解。
(5) 视觉惯性对齐
陀螺仪零偏估计;
尺度,重力加速度,速度计算
初始化详细流程、原理及代码。
预处理:
(1)特征点提取;IMU预积分。
光流法提取跟踪特征点。IMU预积分(基于IMU的时间戳),二者分别运行于ROS两个node(feature_tracker_node.cpp和estimator_node.cpp)
- 光流法提取跟踪特征点:
feature_tracker_node.cpp
核心函数:img_callback():readImage():
createCLAHE->apply():首先对(太亮或太暗EQUALIZE=1)图像进行灰度直方图均衡化处理
calcOpticalFlowPyrLK():使用LK光流法跟踪特征点
outliers rejectWithF():通过基本矩阵剔除;
setMask():设置mask保证提取特征点的均匀分布;
goodFeaturesToTrack():查看是否需要提取特征点,并提取;
addPoints():将goodFeaturesToTrack检测到的新特征点n_pts添加到forw_pts, 其id先设为-1,而后使用updateID进行id更新(新特征点在上一个基础上++)
undistortedPoints():对特征点坐标进行去畸变矫正,转换到归一化坐标系上,并计算每个角点的速度。 - IMU预积分:
estimator_node.cpp和factor/integration_base.h
imu_callback():调用predict()发布高频PVQ,与IMU数据频率一致;
核心函数:predict()通过中值积分计算当前时刻的PVQ,
a ^ ˉ i ′ = 1 2 [ q ^ i ( a ^ i − b ^ a i ) + q ^ i + 1 ( a ^ i + 1 − b ^ a i ) ] {\bar {\hat a}_i}^\prime = \frac{1}{2}[{\hat q_i}({\hat a_i} - {\hat b_{{a_i}}}) + {\hat q_{i + 1}}({\hat a_{i + 1}} - {\hat b_{{a_i}}})] a^ˉi′=21[q^i(a^i−b^ai)+q^i+1(a^i+1−b^ai)] ω ^ ˉ i ′ = 1 2 ( ω ^ i + ω ^ i + 1 ) − b ^ ω {\bar {\hat \omega}_i}^\prime = \frac{1}{2}({\hat \omega _i} + {\hat \omega _{i + 1}}) - {\hat b_\omega } ω^ˉi′=21(ω^i+ω^i+1)−b^ω

R ^ w b k p ^ b k + 1 w = R ^ w b k ( p ^ b k w + v ^ b k w Δ t k − 1 2 g w Δ t k 2 ) + α ^ b k + 1 b k R ^ w b k v ^ b k + 1 w = R ^ w b k ( v ^ b k w − g w Δ t k ) + β ^ b k + 1 b k q ^ w b k ⊗ q ^ b k + 1 w = γ ^ b k + 1 b k \begin{array}{} {\hat R_w^{{b_k}}\hat p_{{b_{k + 1}}}^w = \hat R_w^{{b_k}}\left( {\hat p_{{b_k}}^w + \hat v_{{b_k}}^w{\rm{\Delta }}{t_k} - \frac{1}{2}{g^w}{\rm{\Delta }}t_k^2} \right) + \hat \alpha _{{b_{k + 1}}}^{{b_k}}}\\ {\hat R_w^{{b_k}}\hat v_{{b_{k + 1}}}^w = \hat R_w^{{b_k}}(\hat v_{{b_k}}^w - {g^w}{\rm{\Delta }}{t_k}) + \hat \beta _{{b_{k + 1}}}^{{b_k}}}\\ {\hat q_w^{{b_k}} \otimes \hat q_{{b_{k + 1}}}^w = \hat \gamma _{{b_{k + 1}}}^{{b_k}}} \end{array} R^wbkp^bk+1w=R^wbk(p^bkw+v^bkwΔtk−21gwΔtk2)+α^bk+1bkR^wbkv^bk+1w=R^wbk(v^bkw−gwΔtk)+β^bk+1bkq^wbk⊗q^bk+1w=γ^bk+1bk
详细参见https://blog.csdn.net/weixin_41469272/article/details/138505746
步骤(2)及以后都对应estimator_node.cpp的代码,核心函数process()。
imu_callback()和feature_callback()分别打包imu预积分数据及特征点数据。并通过锁机制触发process()中的操作。
estimator_node.cpp: imu_callback()/feature_callback()/process()
process():VIO线程主函数
|–getMeasurements(): 搜集image及其时间戳附近的imu数据,打包存放到measurement。
|–estimator.processIMU():线性插值IMU数据,使之对齐图像时间戳。
|–new IntegrationBase
|–IntegrationBase->push_back(): propagate(): midPointIntegration() 中值积分,得到PVQ/协方差/雅可比
|–estimator.setReloFrame(): 重定位函数。
|–estimator.processImage(): 关键帧判定;外参标定;视觉惯性对齐;初始化等
|–f_manager.addFeatureCheckParallax(): 判断是否为关键帧,选择marg帧。
|–f_manager.getCorresponding(): 得到两帧的共视特征点。
|–CalibrationExRotation():标定相机IMU外参。
|–solveRelativeR(): 通过计算F阵解算R。
|–initialStructure(): 初始化/初始化失败执行滑窗。
|–relativePose(): 寻找滑窗中的枢纽帧。
|–solveRelativeRT(): 调用cv的findFundamentalMat和recoverPose计算枢纽帧和最新帧之间的
T
T
T。
|–sfm.construct():求解滑窗口中的所有图像帧的位姿和特征点坐标。
|–solveFrameByPnPPnP求解帧间位姿。
|–triangulateTwoFrames()/triangulatePoint(): 三角化特征点。
|–ceres::Problem...: 滑动优化关键帧位姿及地图点坐标。
|–visualInitialAlign()初始化核心函数,通过联合视觉IMU数据,求解尺度,重力,等等。
|–VisualIMUAlignment: 计算陀螺仪偏置,尺度,重力加速度和速度。
|–solveGyroscopeBias(): 陀螺仪零偏估计。
|–LinearAlignment(): 尺度,重力加速度,速度计算。
|–RefineGravity:固定重力幅值,进一步求解重力加速度及尺度等。
|–slideWindow(): 滑窗计算。
|–update(): 获取滑动窗口当前图像帧的imu更新项[
P
,
Q
,
V
,
b
a
,
b
ω
,
a
,
g
P,Q,V,b_a,b_\omega,a,g
P,Q,V,ba,bω,a,g]; 更新imu_buf中的PVQ
|process() start-------------------------------------------------------------:
(2)IMU与图像时间戳对齐与关联
-
打包特征点数据及其前后发布的IMU积分数据
核心函数getMeasurements()搜集image及其时间戳附近的imu数据,可出现以下两种情况:

对IMU数据进行线性插值,对齐图像帧。
将新图像帧特征点信息及其时间戳对应的IMU预积分数据配套存放在measurements中
measurements中配套存放新图像帧特征点信息及其时间戳对应的IMU预积分数据。 -
IMU积分对齐图像时间戳(时间插值)
核心函数estimator.processIMU()计算imu数据与图像数据之间的时间差,利用中值积分及插值估算与图像帧时间戳对应的IMU积分值。
processIMU():new IntegrationBase对象,并通过IntegrationBase->push_back->propagate->midPointIntegration()完成与图像帧对应的中值预积分(result_delta_q/p/v),以及预积分的雅可比(jacobian)及协方差矩阵(covariance)。 -
创建特征点特征管理器(
map)
每个特征点属性包括:(camera_id,[x,y,z,u,v,vx,vy])s,索引为feature_id
map<int, vector<pair<int, Eigen::Matrix<double, 7, 1>>>> image;
xyz_uv_velocity << x, y, z, p_u, p_v, velocity_x, velocity_y;
image[feature_id].emplace_back(camera_id, xyz_uv_velocity);
以下功能均在processImage()的函数内容:关键帧判定;外参标定;初始化;VIO等。processImage()是视觉核心函数,处理特征点信息,完成初始化,滑窗操作。
输入为当前帧特征点特征(7维) map, 代码中命名为image, 以及msg header,用于输入本帧的时间戳。
all_image_frame存放所有图像帧数据(包含了特征点及IMU积分数据)
f_manager中存放管理特征点信息,包含各类特征点相关接口
|processImage() start-------------------------------------------------------------:
先判断关键帧-》再判断是否进行外参在线计算:-》再判断是否需要初始化
f_manager.addFeatureCheckParallax()检测视差并选择添加关键帧:为新特征点创建FeaturePerId结构并添加其至feature,计算各特征点的视差,若视差大,则认为该帧为关键帧
再判断是否进行外参在线计算:
- 如果需要,则每帧图像来之后都需要进行以下操作,直到(frame_count >= WINDOW_SIZE && ric_cov(1) > 0.25(即信息量足够大)
getCorresponding 得到最新帧与次新帧之间的共视关键点(即同一个关键点在该两帧下的图像坐标)
CalibrationExRotation(): frame_count++, 通过F矩阵解算该两帧之间的R,并使用SVD方法进行外参解算
这两步在每帧来时均会被执行,在外参标定好后,则不再执行之后frame_count永远= WINDOW_SIZE
通过getCorresponding()获取最新两帧的共视点, 输送给CalibrationExRotation(),再结合之前的帧共同估算相机与IMU外参。
关联:
若需要估计外参,则估计外参
q
c
b
q_c^b
qcb; 首先通过f_manager.getCorresponding()得到两帧之间的共视点。
执行核心函数CalibrationExRotation():构建
A
x
=
0
Ax=0
Ax=0问题,使用SVD方法进行求解。
原理:联合视觉帧间角度估计(solveRelativeR()通过F矩阵计算得到)与IMU角度积分值(对应图像帧)得到。
q
b
k
+
1
b
k
⊗
q
c
b
=
q
c
b
⊗
q
c
k
+
1
c
k
q_{b_{k+1}}^{b_k}\otimes q_c^b=q_c^b\otimes q_{c_{k+1}}^{c_k}
qbk+1bk⊗qcb=qcb⊗qck+1ck
上式可写为
(
[
q
b
k
+
1
b
k
]
L
−
[
q
c
k
+
1
c
k
]
R
)
q
c
b
=
Q
k
+
1
k
⋅
q
c
b
=
0
\left(\left[q_{b_{k+1}}^{b_k}\right]_L-\left[q_{c_{k+1}}^{c_k}\right]_R\right)q_c^b=Q_{k+1}^k\cdot q_c^b=0
([qbk+1bk]L−[qck+1ck]R)qcb=Qk+1k⋅qcb=0
从而滑窗中的多组帧间约束,并利用鲁棒核函数构建问题:
[
w
1
0
⋅
Q
1
0
w
2
1
⋅
Q
2
1
⋮
w
N
N
−
1
⋅
Q
N
N
−
1
]
q
c
b
=
Q
N
⋅
q
c
b
=
0
\left[ {\begin{array}{} {w_1^0 \cdot Q_1^0}\\ {w_2^1 \cdot Q_2^1}\\ \vdots \\ {w_N^{N - 1} \cdot Q_N^{N - 1}} \end{array}} \right]q_c^b = {Q_N} \cdot q_c^b = 0
w10⋅Q10w21⋅Q21⋮wNN−1⋅QNN−1
qcb=QN⋅qcb=0
其中鲁棒核函数权重:
w
k
+
1
k
=
{
1
,
r
k
+
1
k
<
δ
δ
r
k
+
1
k
,
o
t
h
e
r
w
i
s
e
w_{k + 1}^k = \left\{ {\begin{array}{} {1,}&{r_{k + 1}^k < \delta }\\ {\frac{\delta }{{r_{k + 1}^k}},}&{otherwise} \end{array}} \right.
wk+1k={1,rk+1kδ,rk+1k<δotherwise
从而以上为
A
X
=
0
AX=0
AX=0的经典问题,可使用SVD方法进行求解,原理参考:https://blog.csdn.net/weixin_41469272/article/details/123696963
|initialStructure() start---------------------------------------------------------:
VINS初始化initialStructure()
判断是否初始化完成:
- 若需要初始化,则进行初始化操作initialStructure()
初始化成功后直接进行一次滑窗优化。- 若不需要初始化,则进行滑窗。
判断是否满足启动条件,找到枢纽帧,对滑窗中的相机位姿进行PNP求解,共视点进行三角化()
(1)SFM求解
-
通过计算加速度的标准差,判断是否存在足够的偏移运动,从而使得三角化更加可信;
-
统计各特征点在各帧中的观测,存放在
sfm_f中。 -
寻找滑窗中的最后一帧(最新帧)有足够视差的且足够多共视点的帧作为枢纽帧,与最后一帧完成三角化及PnP。核心函数
relativePose():
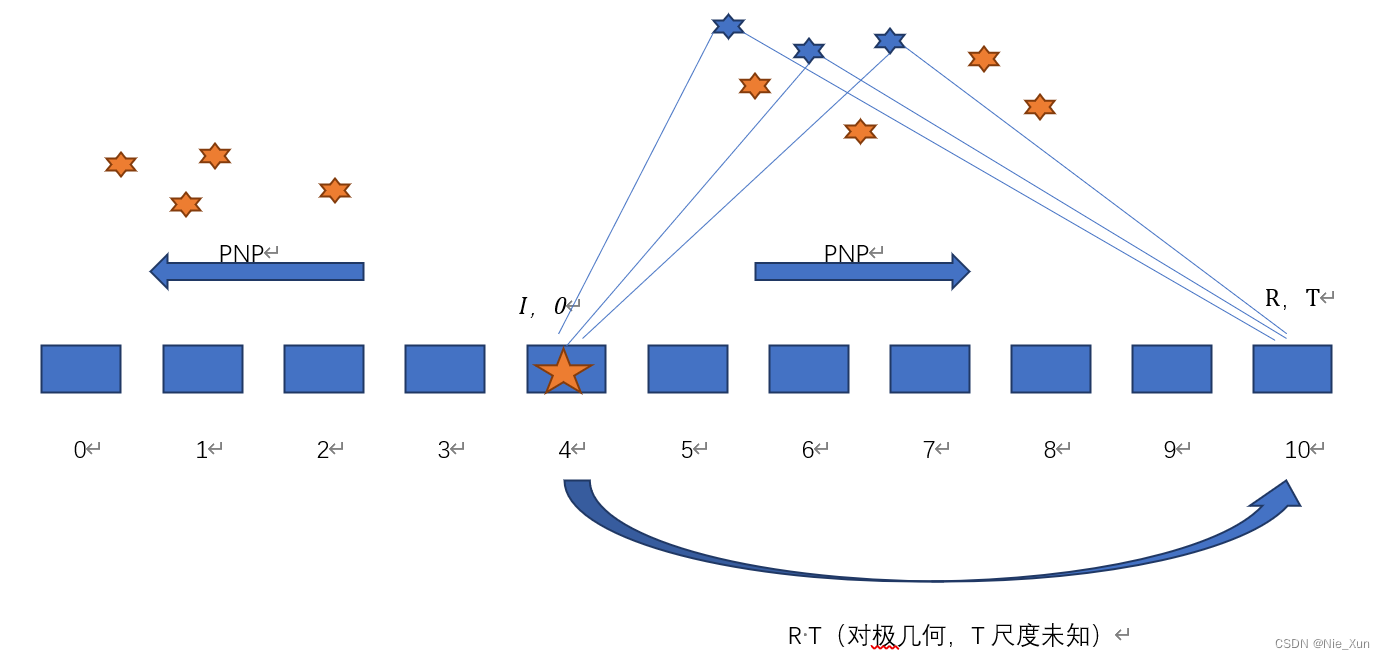 五角星指选出的枢纽帧,遍历滑窗中的帧,计算其与滑窗最后一帧之间的视差和
R
,
t
R,t
R,t,当视差足够,且计算的
R
,
t
R,t
R,t对应的内点数足够时(
五角星指选出的枢纽帧,遍历滑窗中的帧,计算其与滑窗最后一帧之间的视差和
R
,
t
R,t
R,t,当视差足够,且计算的
R
,
t
R,t
R,t对应的内点数足够时(solveRelativeRT=true)时,则认定该帧为枢纽帧。
relativePose():solveRelativeRT():cv::findFundamentalMat/cv::recoverPose来得到枢纽帧与最新帧之间的变换关系 R , t R,t R,t。以枢纽帧为参考帧(零点坐标系),下一步也时计算滑窗中各帧相对于枢纽帧的变换关系。 -
通过上一步得到的特征点进一步使用SFM计算出滑窗中所有帧的位姿及特征点。
核心函数sfm.construct():|–解滑窗口中的所有图像帧的位姿和特征点坐标。
首先设立枢纽帧的位姿为单位阵(以枢纽帧为原点进行三角化及PNP),叠加relativePose()的结果得到滑窗最后一帧的位姿;
遍历滑窗内的帧(先从枢纽帧向后遍历,再向前遍历),分别三角化其与滑窗中最后一帧的共视特征点(triangulateTwoFrames()),及PNP求解该帧位姿(solveFrameByPnP())。同时也三角化一下滑窗中相邻帧的之间的共视特征点(triangulatePoint())。
solveFrameByPnP调用cv::solvePnP函数实现;
triangulateTwoFrames()及triangulatePoint()采用构造 A X = 0 AX=0 AX=0,而后使用SVD方法实现三角化,原理见https://blog.csdn.net/weixin_41469272/article/details/123696963
进行滑动窗口优化(不带尺度),对地图点及滑窗内各相机的位姿进行优化计算。尺度任意设置,并设置滑窗内第一帧为本次滑窗优化的参考帧。
之后取出滑窗中的位姿,并基于为非滑窗帧设立初始值,根据滑窗中得到的3d点PNP得到非关键帧的位姿(最后转换到imu体坐标系下)。
ceres::CostFunction* cost_function = ReprojectionError3D::Create( sfm_f[i].observation[j].second.x(), sfm_f[i].observation[j].second.y());
// 约束了这一帧位姿和3d地图点
problem.AddResidualBlock(cost_function, NULL, c_rotation[l], c_translation[l], sfm_f[i].position);
sfm.construct() -------------------------------------------------------------------end|
遍历所有帧(all_image_frame包括非滑窗帧),调用cv::solvePnP函数实现得到各帧的位姿。
(2)视觉惯性对齐visualInitialAlign()
核心函数VisualIMUAlignment()
|VisualIMUAlignment start---------------------------------------------------------:
-
陀螺仪零偏估计solveGyroscopeBias()
联合视觉帧间角度估计(上文SFM中得到)与IMU角度积分值(对应图像帧)得到。
约束公式如下:

γ b k + 1 b k ≈ γ ^ b k + 1 b k ⊗ [ 1 1 2 J b ω γ δ b ω ] \gamma _{{b_{k + 1}}}^{{b_k}} \approx \hat \gamma _{{b_{k + 1}}}^{{b_k}} \otimes \left[ {\begin{array}{} 1\\ {\frac{1}{2}{\bf{J}}_{{b_\omega }}^\gamma \delta {{\bf{b}}_\omega }} \end{array}} \right] γbk+1bk≈γ^bk+1bk⊗[121Jbωγδbω]
其中:
q b k + 1 c 0 − 1 ⊗ q b k c 0 ⊗ γ b k + 1 b k = q b k + 1 c 0 − 1 ⊗ q b k c 0 ⊗ γ ^ b k + 1 b k ⊗ [ 1 1 2 J b ω γ δ b ω ] = [ 1 0 ] {q_{b_{k+1}}^{c_0}}^{-1}\otimes q_{b_k}^{c_0}\otimes\gamma_{b_{k+1}}^{b_k}={q_{b_{k+1}}^{c_0}}^{-1}\otimes q_{b_k}^{c_0}\otimes\hat \gamma _{{b_{k + 1}}}^{{b_k}} \otimes \left[ {\begin{array}{} 1\\ {\frac{1}{2}{\bf{J}}_{{b_\omega }}^\gamma \delta {{\bf{b}}_\omega }} \end{array}} \right]=\left[\begin{matrix}1\\0\\\end{matrix}\right] qbk+1c0−1⊗qbkc0⊗γbk+1bk=qbk+1c0−1⊗qbkc0⊗γ^bk+1bk⊗[121Jbωγδbω]=[10]
[ 1 1 2 J b ω γ δ b ω ] = γ ^ b k + 1 b k − 1 ⊗ q b k c 0 − 1 ⊗ q b k + 1 c 0 = γ ^ b k + 1 b k − 1 ⊗ q b k + 1 b k \left[ {\begin{array}{} 1\\ {\frac{1}{2}{\bf{J}}_{{b_\omega }}^\gamma \delta {{\bf{b}}_\omega }} \end{array}} \right]={{\hat{\gamma}}_{b_{k+1}}^{b_k}}^{-1}\otimes{q_{b_k}^{c_0}}^{-1}\otimes q_{b_{k+1}}^{c_0}={{\hat{\gamma}}_{b_{k+1}}^{b_k}}^{-1}\otimes q_{b_{k+1}}^{b_k} [121Jbωγδbω]=γ^bk+1bk−1⊗qbkc0−1⊗qbk+1c0=γ^bk+1bk−1⊗qbk+1bk
只考虑虚部,从而得到AX=b的问题。

其中 J b w γ 为 γ b k + 1 b k J_{b_w}^\gamma为\gamma_{b_{k+1}}^{b_k} Jbwγ为γbk+1bk对 δ b w \delta b_w δbw的雅可比矩阵,作者从IntegrationBase对象的jacobian中截取。 -
尺度,重力加速度,速度计算
LinearAlignment()
通过对比加速度积分值与相机SFM得到的偏移,计算得到尺度,重力加速度,以及速度信息
待求解变量:

约束公式如下:

通过整理上式,将待求解量提取出来,可将上式化为以下形式:

其中:

从而可构成最小二乘问题: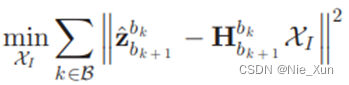
如此问题变为 A x = b Ax=b Ax=b的问题,使用x = A.ldlt().solve(b)进行求解。
RefineGravity()通过固定重力加速度幅值,从而将重力加速度变为2维参数,再次对重力加速度进行优化。

图中: g ^ ˉ \bar{\hat{g}} g^ˉ表示经过上式得到的重力加速度的单位方向向量, ∣ g ∣ \left|g\right| ∣g∣为指定的重力加速度的幅值,待求解 w 1 , w 2 w_1,w_2 w1,w2。
此时,待优化变量变为:

同时:

同样的方法进行求解 A x = b Ax=b Ax=b问题。
VisualIMUAlignment--------------------------------------------------end| -
得到重力加速度及尺度等信息后,重新三角化及积分
f_manager.triangulate()
pre_integrations[i]->repropagate() -
使用尺度信息恢复视觉偏移及特征点深度;
-
使世界坐标系z轴对齐重力加速度方向~~,并将特征点转换到世界坐标系下~~ 。
…
initialStructure--------------------------------------------------end|
初始化成功后,直接执行一次滑窗优化及边缘化。
…
processImage--------------------------------------------------end|
…
process--------------------------------------------------end|
参考文献
《VINS 论文推导及代码解析 崔华坤》
《VINS-Mono: A Robust and Versatile Monocular Visual-Inertial State Estimator》
《Quaternion kinematics for the error-state Kalman filter》















 516
516

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









