









机械臂的相机选型与安装
前言
本文是围绕机械臂的相机如何选型以及安装展开的。从相机的类型引入到用于抓取和操作的相机类型和特点,然后介绍如何根据相机参数选型,最后介绍其机械安装方式。
一、相机的分类与特点
根据原理分类,机器人用相机的技术各有优势与适用场景。光学成像相机适合高分辨率的二维图像任务,而深度感知相机则适用于复杂的三维环境感知任务。红外与热成像相机能够在低光或完全黑暗环境中工作,具有独特的应用场景。
机械臂用的相机主要用来处理工业或者服务业场景抓取与操作任务,其中会涉及到三维环境的感知,所以通常情况下使用深度感知相机。深度感知相机按照原理又分为立体视觉、结构光、飞行时间(ToF) 和 激光雷达(LiDAR)。每种类型的深度感知相机都有其特定的工作原理和应用场景如下表1所示。
表1 深度感知相机的工作原理和特点
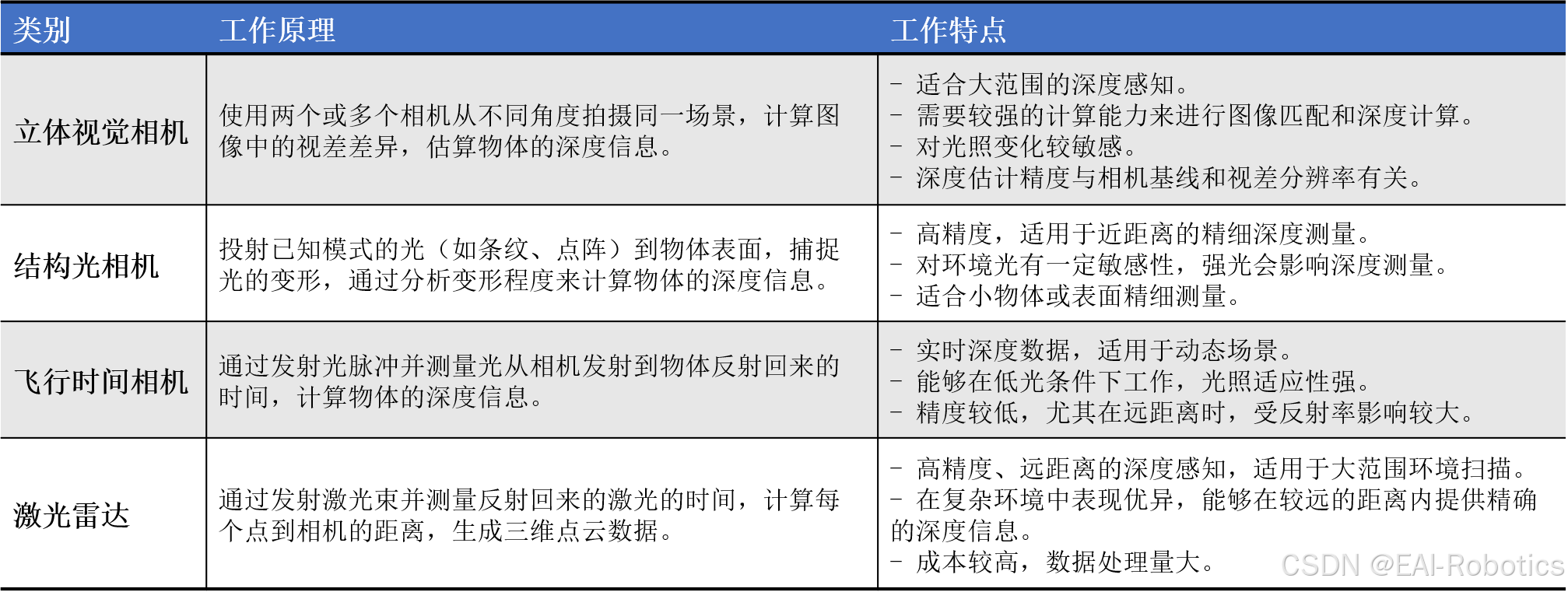
在机械臂抓取任务中,结构光相机和立体视觉相机是较为常用的深度感知相机类型,具体选择取决于任务的需求。飞行时间相机和激光雷达则在某些特定场景下有优势,选择时还要考虑其精度、成本、体积等方面的因素。
结构光相机(如 Intel RealSense D415、Microsoft Azure Kinect):适用于精细、近距离的物体抓取,特别是在室内环境中,能够提供高精度的深度数据。
立体视觉相机(如 ZED Stereo Camera、Intel RealSense D435):适用于大范围的物体识别和抓取任务,尤其在动态场景中表现良好,成本较低,适合广泛的应用场景。
二、相机选型的关键参数
不同的任务对相机参数要求不同,因此在选型时需要根据具体应用的需求进行权衡。以下是几个主要的参数及其对抓取与操作任务的影响:
表2 相机主要工作参数及其对任务的影响
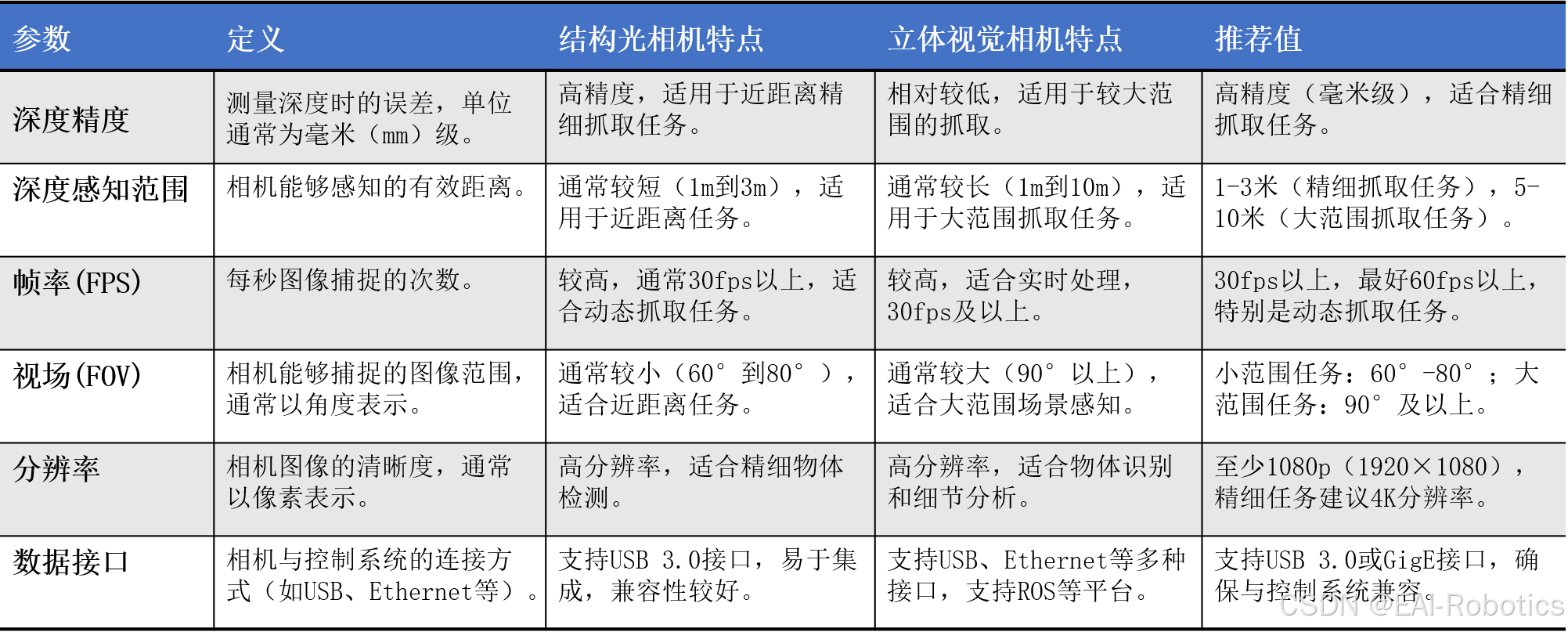
除了以上重要参数之外,有时还需要考虑相机的环境适应性以及尺寸、重量等。
表3 Realsense官网提供的D415和D435相机重要参数
数据来源于官网:https://www.intelrealsense.com/zh-hans/compare-depth-cameras/

以Realsense相机为例,表3所示为Realsense D415和D435相机部分重要参数。请注意,D435相机的惯性测量单元(Inertial Measurement Unit)是可选的,而D415相机则没有这个选项。其他参数如深度视场(Depth FOV)和最小深度距离(Minimum Depth Distance)在两个型号之间也有所不同。
其中,重点说明一下如何利用视场角FOV(Field of View)计算特定深度上的画面范围。

图1 相机的视场角计算示意图。
图片来源于博客:https://blog.csdn.net/renmengqisheng/article/details/121011525
根据上图1的相机的视场角计算示意图,可以得到相机在指定高度dx的画面范围的长Length和宽Width如下式所示。
L
e
n
g
t
h
=
2
c
x
=
2
d
x
tan
(
H
F
O
V
/
2
)
W
i
d
t
h
=
2
c
y
=
2
d
x
tan
(
V
F
O
V
/
2
)
Length=2cx=2dx\tan(HFOV/2) \\ Width=2cy=2dx\tan(VFOV/2)
Length=2cx=2dxtan(HFOV/2)Width=2cy=2dxtan(VFOV/2)
如何在相机的安装高度,深度精度,画面范围,成本之间权衡,都是购买相机之前需要考虑的。
三、相机的安装和固定方式
相机相对于机械臂的安装方式主要有两种,包括眼在手上和眼在手外。两种安装方式各有优缺点,有时需要配合使用,以兼顾全局和局部操作。
眼在手上:相机安装在机械臂的末端执行器(如抓手、工具端)上,与机械臂一起移动。这种方式适用于动态环境和高精度的操作,因为相机与机械臂一起移动,能够实时捕捉物体和周围环境变化,也可以缩短相机与物体之间的距离来提高检测精度。
相机具体的机械固定方式可以利用法兰连接处或者集成于末端执行器上。如果利用机械臂末端的法兰连接处,就在法兰连接处加一个额外伸出部件用于固定相机,如果集成于末端执行器上,就在执行器上预留出能够固定相机的位置。

图2 眼在手外(左)和眼在手上(右)。
图片来源于博客:https://blog.csdn.net/dazhuangba/article/details/127633420
眼在手外:相机安装在机械臂外部,通常固定在一个独立的位置(如机器人的基座、工作台等)。这种方式适用于较广场景的感知任务,避免了视场受限的问题,但可能需要更复杂的计算和协调来保证准确抓取。
对于眼在手外,相机的固定方式通常有三种:
1)将相机安装在机械臂的基座或固定的工作台上,通常使用一个支架或固定架来稳定相机。
2)对于较大范围的工作场景,部分机器人会选择将相机安装在天花板或墙面上,通过合适的角度来覆盖整个工作区域。
3)在一些需要灵活控制相机位置的场景中,可能会使用独立的移动支架来安装相机。支架可以根据需要调整相机的位置和角度。
具体的安装和固定方式除了要考虑具体任务的需求,还有考虑购买相机的机械接口(如螺纹口的尺寸与数量)的实际情况。
总结
本文简单介绍了机器人用相机的类型和特点引出机械臂用的相机类型,然后重点介绍抓取与操作任务的相机选型方法,最后则给出了相机的安装和固定方式。下一篇将介绍相机的驱动安装,通讯配置以及坐标系变换。


















 895
895

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











