






knn搜索在这里pcl kdtree knn搜索-CSDN博客
建树跟knn搜索一样,搜索函数变了而已
pcl::KdTreeFLANN<pcl::PointXYZ> kdtree;
kdtree.setInputCloud(cloudIn);搜索是radiusSearch
参数:第一个cloudIn->points[i]是搜索点,radius是搜索半径,out_ids是搜索半径内的点的索引,out_dists_square是距离平方
for (int i = 0; i < cloud_size; i++) {
vector<int> out_ids;
vector<float> out_dists_square;
if (kdtree.radiusSearch(cloudIn->points[i], radius, out_ids, out_dists_square) > 0) {
//neighbors_dist_sqr.push_back(out_dists_square);
//neighbors_ids.push_back(out_ids);
}
}下面是整个代码,因为要对比flann和nanoflann的建树,搜索的速度,我加了时间,可以删掉
vector<vector<float> > neighbors_dist_sqr;记录所有点搜索半径内的邻居的距离平方
vector<vector<int> > neighbors_ids;记录所有点搜索半径内的邻居的索引
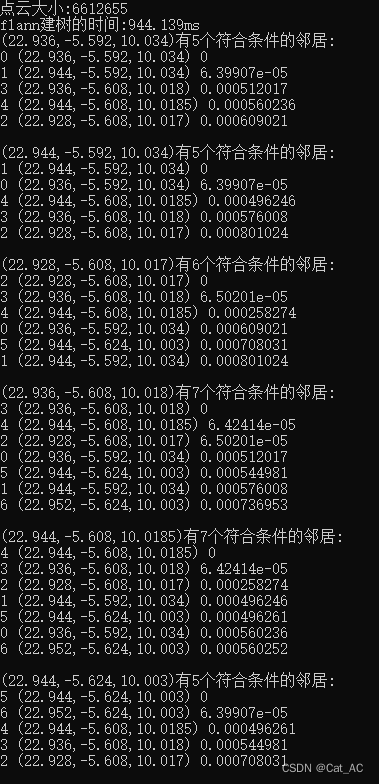
只输出了前十个点的邻居的索引,值,距离的平方
void flann_radius_allneighbor(CP cloudIn, float radius) {
pcl::console::TicToc time; time.tic();
size_t cloud_size = cloudIn->size();
pcl::KdTreeFLANN<pcl::PointXYZ> kdtree;
kdtree.setInputCloud(cloudIn);
auto t1 = time.toc();
cout << "flann建树的时间:" << t1 << "ms" << endl;;
time.tic();
vector<vector<float> > neighbors_dist_sqr;
vector<vector<int> > neighbors_ids;
for (int i = 0; i < cloud_size; i++) {
vector<int> out_ids;
vector<float> out_dists_square;
if (kdtree.radiusSearch(cloudIn->points[i], radius, out_ids, out_dists_square) > 0) {
neighbors_dist_sqr.push_back(out_dists_square);
neighbors_ids.push_back(out_ids);
}
}
for (int i = 0; i < 10; i++) {
cout << cloudIn->points[i] << "有" << neighbors_dist_sqr[i].size() << "个符合条件的邻居:";
for (int j = 0; j < neighbors_ids[i].size(); ++j) {
cout << neighbors_ids[i][j] << " ";
cout << cloudIn->points[neighbors_ids[i][j]] << " " << neighbors_dist_sqr[i][j] << endl;
}
cout << endl;
}
auto t2 = time.toc();
//Myprint(cloudIn,all_neighbors, k);
cout << "flann_radius :\t" << t2 << "ms" << endl;
cout << "flann_radius 总时间:\t" << t1 + t2 << "ms" << endl;
return;
}















 1013
1013











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









