






可以利用BoundaryEstimation来求边界,我写在这里了
pcl 边界提取,利用BoundaryEstimation-CSDN博客
不过在点云数量很大的时候,这种方法很耗费时间.
在网上找了一些文章,发现了这个方法<<阶梯垛型点云边界快速提取方法研究>>
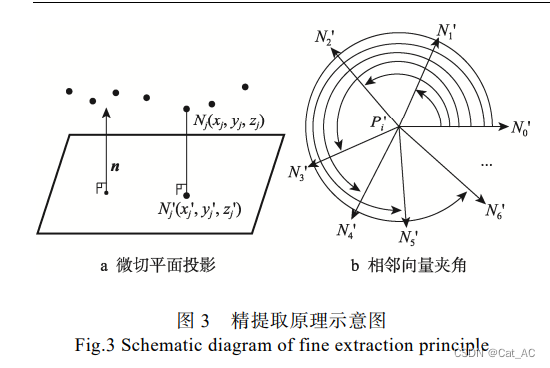
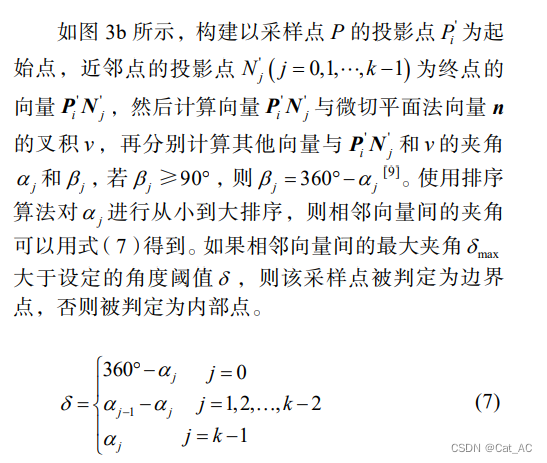
判断点P是否为边界点的步骤
1,求出距离P点最近的个点,N1,N2,N3,....Nk
2,给P一个方向,我选的是PO方向 (O是原点),计算向量PN1,PN2,...PNk
3,求出PO和PN1,PN2,...PNk的夹角,这里的夹角是0~360°的
4,把所有的夹角排序,升序
5,求相连夹角的差值,如果差值大于阈值,就是边界值
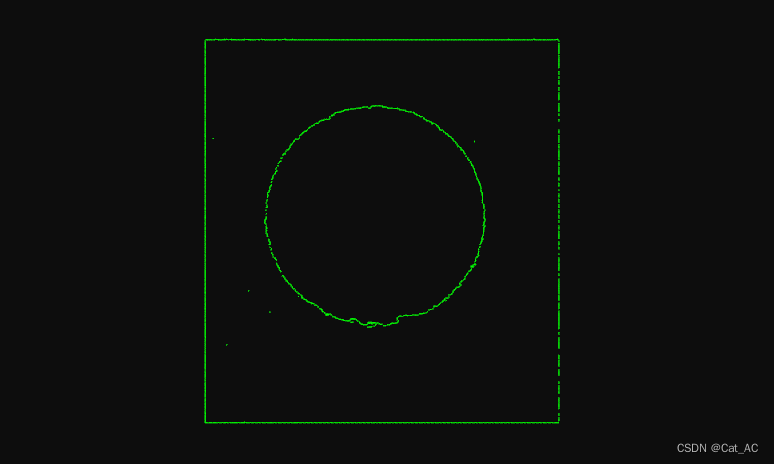
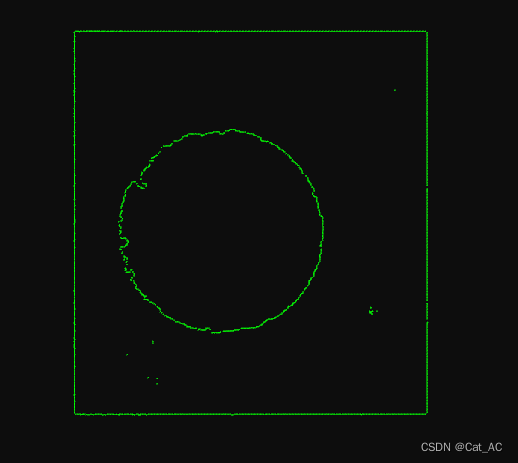
我的实验结果,带有椭圆,所以阈值设置的是120°

















 1381
1381

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









