









MIMO雷达的多普勒偏置波形
摘要
在多输入多输出(MIMO)雷达中,独立的波形从不同的位置发射,产生的反射经过处理形成一个比雷达物理孔径更大的“虚拟天线阵列”。本文研究了用于自适应MIMO GMTI雷达系统的多普勒偏置波形的设计。这种波形提供了良好的自适应对消性能,但也受到较强的距离和多普勒模糊。我们分析了这些模糊,并展示了它们与阵列拓扑和波形设计的关系。然后,我们描述了一种新的波形方法,称为“抖动DDMA”,它可以在大范围多普勒区域实现高性能杂波消除,而不会引入模糊的距离或盲速,并且不会增加MIMO处理器的计算负荷。
1 介绍
多输入多输出(MIMO)雷达概念最近被提出用于机载和地面雷达应用[1-13]。在MIMO雷达中,Nt个发射天线每个发射一个独特的波形。这些波形在环境中传播,被目标和其他物体反射,随后被Nr接收天线接收。每个接收器连接到一组滤波器,其中一个滤波器调谐到每个传输波形。总的来说,这些滤波器输出形成Nt⋅Nr个数据通道,然后可以根据需要组合,例如最大化信噪比(SINR)。
为了获得最佳性能,Nt个MIMO发射波形必须是正交的。“多普勒分多址”(DDMA)系统通过在雷达的多普勒带内传输频率偏置的Nt个波形来近似这种情况。在本文中,我们回顾了这种波形背后的理论(第二节),并描述了DDMA系统如何利用信号环境的先验知识来实现“准正交性”。然后,在第三节中,我们讨论了与DDMA波形相关的范围和多普勒模糊性,展示了它们如何导致“幻影盲速”和其他问题。我们分析了这些歧义,并展示了它们与阵列拓扑和波形设计的关系。然后,在第四节中,我们描述了一种改进的DDMA方法,该方法增强了目标检测和机载MTI杂波抵消。
2 背景
A MIMO雷达原理
考虑一个有着Nt个发射天线和Nr个接收天线的阵列。在MIMO雷达中,每个发射天线辐射一个独立的波形。因此,令sn代表第n个发射波形(即sn是L*1的向量,包含第nge发射波形的复基带时域采样)。类似地,令![]() 表示发射波形的Nt*L矩阵。这些波形在环境中传播,当遇到目标和杂波时反射。点目标t,举例来说,会反射一个正比于
表示发射波形的Nt*L矩阵。这些波形在环境中传播,当遇到目标和杂波时反射。点目标t,举例来说,会反射一个正比于![]() 的信号,其中
的信号,其中![]() 表示目标t的Nt*1发射阵列响应向量。这里,目标t用参数集
表示目标t的Nt*1发射阵列响应向量。这里,目标t用参数集![]() 显式表征。在典型的机载雷达系统,这个参数集是很小的,比如
显式表征。在典型的机载雷达系统,这个参数集是很小的,比如![]() ,其中θt和ζt分别为雷达到目标t的方位角和俯仰角。然而,在DDMA MIMO雷达中,可能需要更大的目标参数集(参见第三节)。
,其中θt和ζt分别为雷达到目标t的方位角和俯仰角。然而,在DDMA MIMO雷达中,可能需要更大的目标参数集(参见第三节)。
接下来,反射信号在环境中传播,并被天线阵列接收。假设每个接收机采集R >> L个采样,则接收阵列输出端的Nt × R采样矩阵为
 (1)
(1)
这里,![]() 表示与目标t相关的复数比例因子,
表示与目标t相关的复数比例因子,![]() 表示接收阵列的目标t的Nr*1响应向量。另一方面,Nt*R矩阵St描述了各种波形如何传播到目标t并被目标t反射。也就是说,St的第n列包含了sn与目标脉冲响应的卷积。此外,由于R >> L, St也将包含许多零,以解释到目标的传播延迟。最后,Nt*R矩阵N表示噪声和其他干扰。
表示接收阵列的目标t的Nr*1响应向量。另一方面,Nt*R矩阵St描述了各种波形如何传播到目标t并被目标t反射。也就是说,St的第n列包含了sn与目标脉冲响应的卷积。此外,由于R >> L, St也将包含许多零,以解释到目标的传播延迟。最后,Nt*R矩阵N表示噪声和其他干扰。
接收到采样矩阵X后,对其进行处理,提取目标检测和/或形成图像。例如,目标检测可以通过将接收到的样本通过一组匹配的滤波器(在快时间、慢时间和空间中匹配)来执行。空间(或时空)匹配滤波器w通常被自适应地选择以最大化SINR,即
 (2)
(2)
其中Vtgt是目标响应向量。这个问题的解已知为![]() ,其中R是干扰协方差矩阵,γ是一个非零复数标量。
,其中R是干扰协方差矩阵,γ是一个非零复数标量。
B 多普勒分多址波形
在实践中,自适应MIMO雷达的性能将取决于它使用的波形。因此,确定合适的波形是当前研究的热点问题。为此,经常讨论的一种方法是频分多址(FDMA)。
在MIMO雷达文献中,术语FDMA通常用于指同时占用不同频率的波形集。数学上,第n个FDMA波形可以写成:
![]() (3)
(3)
n=1,…,Nt,其中s (t)为带宽B的常见雷达波形,fn为波形n的载波频率。通常载波频率线性步进,例如
![]() (4)
(4)
其中f0为基础载波,Δf为频率步长。在MIMO雷达中,只要反射的能量(来自所有Nt发射机)在频域(近似)不相交,这种波形就被认为是准正交的。
在发射时,FDMA MIMO雷达通常会同时发射所有的Nt个频偏波形。然后,接收到Nt个信号中每个通过一组匹配的滤波器进行处理--每个波形一个滤波器。本质上,每个滤波器解调单个发射信号并将其压缩到一定距离内。
有许多类型的FDMA波形,取决于Δf。然而,之前我们表明,自适应杂波抵消随着频率偏移的增加而迅速退化[14],根据:
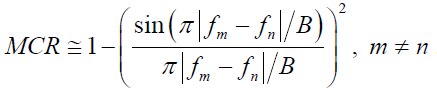 (5)
(5)
因此,实现良好对消的唯一方法是精细地交错FDMA波形带。例如,多普勒分多址(DDMA)波形,完成这一设置
![]() (6)
(6)
因此,Nt个 DDMA发射波形的每一个将占据雷达明确的多普勒波段的“切片”(见图1)。在接收时,MIMO处理器可以使用传统的多普勒滤波器隔离每个发射信道。
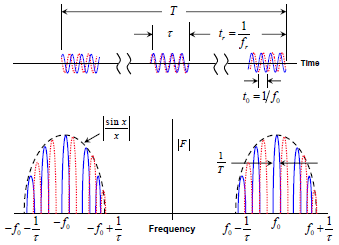
图1 DDMA波形;展示2个发射机(纯蓝和点红)
在实践中,由(3)-(4)和(6)定义的调制在诸如雷达脉宽τ之类的短时间间隔内近似恒定。因此,DDMA调频可以通过分段恒相位调制来近似实现[15]。也就是说,第n个频移波形是通过对一些常见波形进行相位调制而产生的
![]() (7)
(7)
其中,![]() 表示脉冲重复间隔
表示脉冲重复间隔![]() 期间发射机n使用的相位值。这种近似可以简化阵列硬件,因为每个发射通道只需要一个移相器(而不是独立生成频率偏移波形的手段)。更重要的是,通过[14]的分析,可以得到很好的杂波抵消。
期间发射机n使用的相位值。这种近似可以简化阵列硬件,因为每个发射通道只需要一个移相器(而不是独立生成频率偏移波形的手段)。更重要的是,通过[14]的分析,可以得到很好的杂波抵消。
在接下来的讨论中,我们将重点关注(4)和(6)-(7)定义的DDMA波形类型。然而,我们描述的许多问题也将适用于采用真(即连续调制)DDMA的系统。
3 DDMA模糊
只要PRF满足,DDMA反射将是准正交的,因此将被适当隔离(即,不会混合来自不同发射/接收路径的贡献)
![]() (8)
(8)
其中BD为环境(包括目标和杂波)的多普勒带宽。然而,对于很大的Nt和BD,这种PRFs将相对较高,可能导致“距离模糊”和距离重叠区域。
为了解决这个问题,我们倾向于将PRF降低到:
![]() (9)
(9)
(其中BC是与杂波相关的多普勒带宽),导致PRFs足够高,可以不模糊地从每个发射/接收信号路径中隔离杂波,但不需要高到不模糊地隔离来自速度差异很大的目标的反射。特别是,通过一个发送/接收路径接收的高速目标看起来与通过不同的发送/接收路径接收的低速目标(或杂波)相似。当这种情况发生时,高速目标基本上会“折叠”到低速目标上。此外,高速目标可能会混入与(低速)杂波相关的盲区。
A 模糊的影响
使用(9)的DDMA性能如图2所示。本文对一种侧视线性机载GMTI雷达进行了仿真。该雷达具有Nt =16 (内部阵元间距dE =0.19 m,阵元增益13 dBi),Nr =1,fr = 6745Hz,速度v = 27.5 m/s,波长λ = 0.1265 m,高度10000 ft。
根据机载自适应雷达理论[16],该雷达的主瓣杂波多普勒展频应该为![]() 。在我们的仿真中,地面在6公里的倾斜距离内照射(对应于ζD=30°),并且由于阵元方向图效应,雷达的主瓣杂波功率在方位角偏移θB=34°处降至噪声以下。最终,多普勒展频约为±210.5Hz,对应于多普勒带宽BC=421Hz。我们的系统使用单个发射相位中心(即Nt=1的SIMO雷达),所有杂波将出现在一个多普勒频带(在±210.5Hz之间)。有Nt=16个发射机,然而,杂波频谱包含16个不同的杂波频带,如图2a所示。Nt-1个额外杂波频带的每一个和Nt-1个多普勒偏置发射波形之一有关(备注:发射机n被移位(n −1)Δf,其中Δf = fr /Nt = 421.6Hz,注释在图2a靠近顶部的地方)。此外,快速目标将是多普勒模糊的,因此会混叠回杂波内区,导致自适应杂波消除后的信噪比损失,如图2b-c所示。图2b中有Nt条杂波脊(即与SIMO雷达相比,额外增加了Nt-1条高SINR损失的杂波脊)。这意味着在任何给定的目标角度下,DDMA波形将产生Nt-1个新的“盲速”。图2c显示了在阵列侧面的SINR损耗图。在那里,我们看到 Nt个窄多普勒区域(即目标速度),由于在STAP处理过程中形成的杂波零值而具有高损耗。相比之下,类似的低PRF SIMO雷达只有一个盲速。
。在我们的仿真中,地面在6公里的倾斜距离内照射(对应于ζD=30°),并且由于阵元方向图效应,雷达的主瓣杂波功率在方位角偏移θB=34°处降至噪声以下。最终,多普勒展频约为±210.5Hz,对应于多普勒带宽BC=421Hz。我们的系统使用单个发射相位中心(即Nt=1的SIMO雷达),所有杂波将出现在一个多普勒频带(在±210.5Hz之间)。有Nt=16个发射机,然而,杂波频谱包含16个不同的杂波频带,如图2a所示。Nt-1个额外杂波频带的每一个和Nt-1个多普勒偏置发射波形之一有关(备注:发射机n被移位(n −1)Δf,其中Δf = fr /Nt = 421.6Hz,注释在图2a靠近顶部的地方)。此外,快速目标将是多普勒模糊的,因此会混叠回杂波内区,导致自适应杂波消除后的信噪比损失,如图2b-c所示。图2b中有Nt条杂波脊(即与SIMO雷达相比,额外增加了Nt-1条高SINR损失的杂波脊)。这意味着在任何给定的目标角度下,DDMA波形将产生Nt-1个新的“盲速”。图2c显示了在阵列侧面的SINR损耗图。在那里,我们看到 Nt个窄多普勒区域(即目标速度),由于在STAP处理过程中形成的杂波零值而具有高损耗。相比之下,类似的低PRF SIMO雷达只有一个盲速。
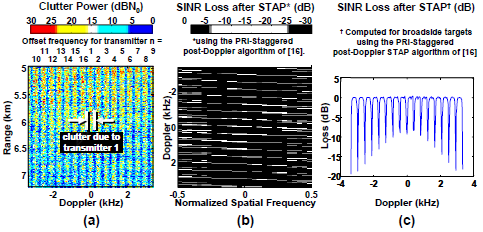
图2 使用(4)和(9)的DDMA波形的GMTI雷达
B 模糊的分析
令dt表示相关目标t的多普勒移位。此外,定义![]() 和
和![]() 分别作为快时间和慢时间目标多普勒集合。
分别作为快时间和慢时间目标多普勒集合。
如第3节A所述。采用(9)的DDMA波形进行多普勒快速目标混叠。当这种情况发生时,用于接收每个快速目标t(由参数![]() 定义)的STAP权重将与用于接收某些慢速目标t‘(由参数
定义)的STAP权重将与用于接收某些慢速目标t‘(由参数 定义)的权重几乎相同。如果Θt’位于真正的杂波脊附近,目标Θt会经历损失(由于它明显靠近杂波)。
定义)的权重几乎相同。如果Θt’位于真正的杂波脊附近,目标Θt会经历损失(由于它明显靠近杂波)。
在SIMO雷达中,这种混叠只发生在|dt| > fr/2时。然而,在DDMA MIMO雷达中,混叠发生在更慢的目标速度下,即当|dt| > fr/2Nt时。这种“早发”多普勒混叠是DDMA波形的直接结果。
此外,DDMA多普勒混叠与SIMO混叠之间也有重要的区别。具体来说,在DDMA中,快速目标将以这样的方式反射每个发射波形,从而与来自不同MIMO发射机的慢目标反射变得多普勒模糊。为了阐明这种关系,我们可以将aTx明确地写成四个不同目标参数的函数,(注意:这里的两个新参数是多普勒dt和距离区域zt)。现在,当DDMA处理器尝试应用匹配的滤波器,专门为一些慢目标![]() 调优时,更快的目标将出现在这些滤波器的输出中;此外,这些快速目标的数组响应向量
调优时,更快的目标将出现在这些滤波器的输出中;此外,这些快速目标的数组响应向量![]() 是
是![]() 的排列。此属性创建了独特的“准模糊性”,如图3所示。
的排列。此属性创建了独特的“准模糊性”,如图3所示。
特别是,![]() 的阵元被排列成
的阵元被排列成![]() 的阵元的确切模式将取决于DDMA频率映射到发射机的顺序。标准线性映射(4)得到一个循环置换。也就是说,
的阵元的确切模式将取决于DDMA频率映射到发射机的顺序。标准线性映射(4)得到一个循环置换。也就是说,![]() 是由循环移动(或旋转)
是由循环移动(或旋转) ![]() 形成的。这种移动的大小,Nshift,取决于dt。如果|dt|很大,位移就很大;如果|dt|很小,位移也很小。在数量上,我们可以定义:
形成的。这种移动的大小,Nshift,取决于dt。如果|dt|很大,位移就很大;如果|dt|很小,位移也很小。在数量上,我们可以定义:
![]() (10)
(10)
以及
![]() (11)
(11)
式中⎣ ⎦表示底层运算,sign (x)根据x的符号返回1或-1。然后,通过Nshift次循环移位形成![]() ,即:
,即:
 (12)
(12)
对于均匀线性阵列(ULA),这种排列引起强烈的准模糊性。当![]() 时,ULA目标响应向量为:
时,ULA目标响应向量为:
 (13)
(13)
其中,![]() ,注意(13)的阵元具有线性相位斜率。对于快速目标,(13)将循环移位Nshift次;然而,得到的(移位的)响应向量仍将具有相同的线性相位斜率(除了阵元Nshift处的相位不连续)。根据相位不连续的确切位置,所产生的阵列响应方向图可以从“和”到“差”方向图变化。然而,无论不连续位置如何,得到的响应向量都将与慢速目标Θt’的响应向量高度相关,导致“近处”模糊。此外,在某些目标多普勒下,这种线性相位级数将与杂波的级数几乎相同。因此,杂波零值在多普勒信号中会显得模糊。
,注意(13)的阵元具有线性相位斜率。对于快速目标,(13)将循环移位Nshift次;然而,得到的(移位的)响应向量仍将具有相同的线性相位斜率(除了阵元Nshift处的相位不连续)。根据相位不连续的确切位置,所产生的阵列响应方向图可以从“和”到“差”方向图变化。然而,无论不连续位置如何,得到的响应向量都将与慢速目标Θt’的响应向量高度相关,导致“近处”模糊。此外,在某些目标多普勒下,这种线性相位级数将与杂波的级数几乎相同。因此,杂波零值在多普勒信号中会显得模糊。
C 通过阵列拓扑减少模糊
非均匀采样的线性(或平面)孔径将没有响应向量的形式(13)。因此,“模糊”的明显强度将会降低。同样,非平面阵列不太可能具有类似(13)的响应向量。因此,这种阵列拓扑可以提供有用的工具来减轻第3节B中描述的多普勒模糊问题。
不幸的是,目前大多数雷达阵列使用某种形式的均匀线性或平面拓扑结构。在未来,由于其较低的制造成本以及其他原因,这种拓扑结构可能会继续主导市场。因此,MIMO雷达开发人员将需要使用其他技术来减轻多普勒模糊。这些技术是下一节的重点。
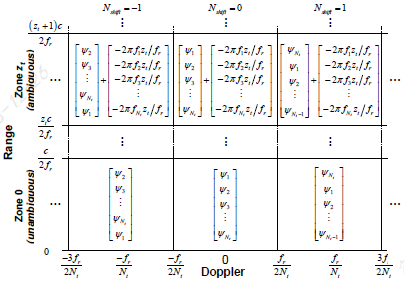
图3 与向量aTx(即-j*ln(aTx))相关的相位项,由使用(4)的线性映射DDMA波形产生
4 抖动DDMA
为了消除DDMA盲速,我们开发了两种“抖动DDMA”方法。我们的第一种方法是通过改变DDMA发射频率和MIMO发射天线之间的映射(即抖动)来实现的。相反,第二种方法通过改变每个发射波形的相位来工作。这两种技术本质上都是修改多普勒模糊信号的发射阵列响应以抑制模糊。更好的是,这两种技术是互补的,这意味着它们可以一起使用以获得更大的性能增强。
A 频率抖动DDMA
在我们的频率抖动DDMA方法中,我们改变了发射频率和发射天线之间的映射。这反过来又修改了(12)的排列,使其不再是简单的循环移位,即:
 (14)
(14)
在选择DDMA频率到MIMO发射机的映射时,我们的目标是以某种有利的方式改变多普勒模糊响应aTx(Θt)。例如,映射可以是伪随机的(这可以在所有角度上提供良好的性能)。另一方面,映射可以被优化,以支持特定的目标角度和速度。
伪随机频率映射的影响如下面的图4所示。在这里,我们绘制了机载GMTI雷达的SINR损失,如图2所示(除了现在DDMA频率到发射机的映射是伪随机的,而不是线性的,如(4))。远离宽边区域(即图4a的左侧或右侧),频率抖动的影响尤为明显。在这些区域,阵列响应向量的相位斜率,![]() ,因为ψ>>0将非常大。因此
,因为ψ>>0将非常大。因此![]() 的随机排列导致多普勒模糊响应向量
的随机排列导致多普勒模糊响应向量![]() ,通常在其未排列的对应向量上有一个小的投影。因此,这允许在与快速目标相同的角度对杂波进行良好的自适应消零。
,通常在其未排列的对应向量上有一个小的投影。因此,这允许在与快速目标相同的角度对杂波进行良好的自适应消零。
然而,在宽边附近,s有一个小的相斜率ψ。因此,![]() 的随机排列将导致响应向量
的随机排列将导致响应向量![]() 更接近其未排列的对应向量。在极端情况下(即,在阵列宽边,当
更接近其未排列的对应向量。在极端情况下(即,在阵列宽边,当![]() 和ψ = 0时),这个距离变为零;因此,排列
和ψ = 0时),这个距离变为零;因此,排列![]() 对它没有影响。因此,很难(或不可能)探测到靠近宽边的某些快速目标。这一点如图4b所示,图4b显示了宽边SINR损失。请注意,尽管存在频率抖动,但仍存在Nt个盲速。必须使用另一种技术来抑制该宽边区域的盲速。
对它没有影响。因此,很难(或不可能)探测到靠近宽边的某些快速目标。这一点如图4b所示,图4b显示了宽边SINR损失。请注意,尽管存在频率抖动,但仍存在Nt个盲速。必须使用另一种技术来抑制该宽边区域的盲速。
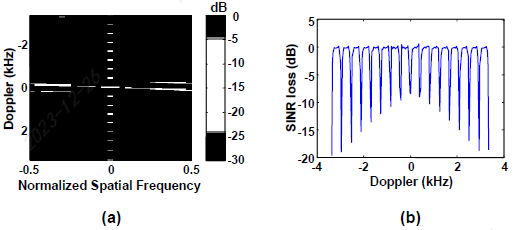
图4 使用频率抖动DDMA波形的GMTI雷达。(a)SINR损失,(b)宽边SINR损失
B 相位抖动DDMA
在宽边区域附近,频率抖动的DDMA无法减轻第3节B中讨论的外来盲速。幸运的是,第二种技术,称为“相位DDMA”,在这个区域效果很好。
在相位抖动的DDMA系统中,我们只需给每个DDMA发射信号增加一个相位偏移。也就是说,我们发射
![]() (15)
(15)
注意,发射机n被“分配”一个相位值υn。
在接收时,MIMO处理器将使用Nt*Nr个匹配滤波器来恢复每个期望的目标多普勒。对于明确的(即期望的)目标,这些滤波器正确地删除所有插入的传输相位,{νn}。然而,对于模糊的目标,发射阵列响应向量将被置换(如第3节B所讨论的),并且将具有加性相位剩余项。特别是,在旨在恢复发射信道n的匹配滤波器的输出处,多普勒模糊目标将具有加性相位残留![]() 。选择υn在[0,2 π]上均匀随机,使这些相位残差随机,在所有角度上提供鲁棒性能。然而,υn的其他选择可以用于在较小的角扇区上优化性能。
。选择υn在[0,2 π]上均匀随机,使这些相位残差随机,在所有角度上提供鲁棒性能。然而,υn的其他选择可以用于在较小的角扇区上优化性能。
有趣的是,插入与信道相关的相位抖动,然后再将其移除,并将不需要的信号从所需的信号集合中移除,这种想法并不新鲜。同样的想法以前曾被用于减轻雷达电子设备产生的非线性失真效应[17]。对于目前的工作,我们只是将这一概念应用于MIMO雷达。
图5显示了应用于DDMA的相位抖动的影响。在这里,Nt相位值{νn}在[0,2 π]上是均匀随机的。伪随机频率抖动也被使用。注意,由视轴附近的模糊杂波造成的损失(图5b)已经几乎消除了。
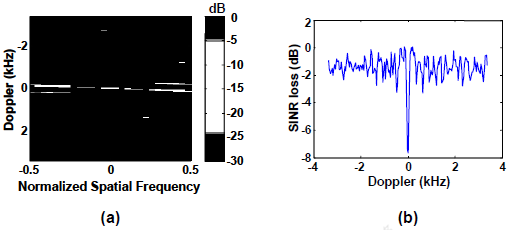
图5 使用相位抖动DDMA波形的GMTI雷达。(a)SINR损失,(b)宽边SINR损失
C 距离模糊
在脉冲多普勒雷达中,只要在距离ρt > c/2fr处有来自目标(或杂波)的可探测回波,就会出现距离模糊。低于c/2fr的距离被称为距离不模糊,而距离![]() 被称为位于第zt个模糊距离区域。
被称为位于第zt个模糊距离区域。
在DDMA MIMO雷达中,距离模糊响应向量![]() 将不同于不模糊响应向量
将不同于不模糊响应向量![]() ,即使两者处于相同的角度和多普勒。为了检测距离模糊的目标,必须使用正确的导向矢量。
,即使两者处于相同的角度和多普勒。为了检测距离模糊的目标,必须使用正确的导向矢量。
对于线性映射的DDMA(如(4)所示),![]() 的第n个元素乘以
的第n个元素乘以![]() ,如图3所示。这个位移对响应向量
,如图3所示。这个位移对响应向量![]() 有一个有趣的影响。特别是,它调制
有一个有趣的影响。特别是,它调制![]() ,使其响应方向图指向移位的角度。这将导致区域zt中的目标(或杂波)和区域0中的目标(或杂波)之间的模糊(但角度有所偏移)。这种角度移位的大小随着zt的增加而增加,这意味着距离“近”的距离区域将有较小的角度移位,而距离较远的范围区域有较大的角度移位。这可能是一个问题,例如,如果我们有兴趣从相对较近的少数距离区域接收信号。在这种情况下,响应方向图的小角度偏移可能导致来自附近角度的杂波(或目标)与感兴趣的信号竞争。
,使其响应方向图指向移位的角度。这将导致区域zt中的目标(或杂波)和区域0中的目标(或杂波)之间的模糊(但角度有所偏移)。这种角度移位的大小随着zt的增加而增加,这意味着距离“近”的距离区域将有较小的角度移位,而距离较远的范围区域有较大的角度移位。这可能是一个问题,例如,如果我们有兴趣从相对较近的少数距离区域接收信号。在这种情况下,响应方向图的小角度偏移可能导致来自附近角度的杂波(或目标)与感兴趣的信号竞争。
然而,频率抖动的DDMA可以帮助解决这个问题。通过改变频率到发射机的映射,我们修改了应用于距离模糊响应向量的调制。例如,对于某些频率抖动,我们可以增加应用于附近距离区域的角度移位的大小。因此,这种类型的抖动可以用来在附近的距离模糊更好地分离信号和杂波。
同样,我们可以伪随机地将频率映射到发射机。这种抖动产生的调制序列不会改变角度响应。相反,它们赋予每个量程区的响应向量独特的相位特征。因此,来自不同距离区域的响应向量具有较低的互相关。此外,这些响应向量可以被自适应杂波消除算法(例如STAP)用作导向矢量——进一步抑制距离模糊(非常类似于第4节A中抑制多普勒模糊的方式)。
5 总结和结论
在本文中,我们研究了一种有前途的FDMA波形,其中不相交的多普勒频带用于隔离MIMO发射机。特别是,这些“多普勒分多址”波形被证明支持高MCR水平。然而,这些波形也受到模糊和盲速的影响。这些模糊性的来源进行了调查,他们的起源被证明是使用了线性频移跨越一个均匀的线性天线孔径。
为了解决这个问题,我们提出了两种改进的DDMA波形方法。这两种方法都被证明能够消除盲速和/或将它们转移到多普勒中更容易容忍的区域。采用伪随机抖动进行了仿真。在那里,我们观察到完全消除了外来盲速,总体损失相对较小(随着Nt的增加而减少)。因此,当需要在宽多普勒范围内进行目标检测时,这些方法应该是有用的;如果已知目标仅处于低多普勒,则可以使用标准DDMA方法而不会产生这种损失。
最后,请注意,我们在所有的仿真中都使用了Nr =1。这种选择使我们能够更好地说明DDMA波形、发射响应方向图和SINR损耗之间的联系。然而,在实践中,我们所有的波形方法都可以直接应用于Nr > 1的场景。
















 6396
6396











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











