







在看apollo的common的代码,发现大量运用了向量的相关知识,就整理了一些向量的一些基础内容。主要是参考了百度百科和下面的博客。
参考文献:
[1] https://zhuanlan.zhihu.com/p/143222979
[2]百度百科
[3]《数学要素》姜伟生
[4]apollo源码
1.1 向量的定义
百度的定义:在数学中,向量(也称为欧几里得向量、几何向量),指具有大小(magnitude)和方向的量。它可以形象化地表示为带箭头的线段。如图1所示,线段的长度表示向量的大小,向量的方向也就是箭头所指的方向。
n个有次序的数
x
1
,
x
2
,
x
3
.
.
.
.
.
.
x
n
{x_1,x_2,x_3......x_n}
x1,x2,x3......xn所组成的数组称为n维向量,这个数称为该向量的个分量,第i个数称为第个分量。向量的大小称为模长。
n维向量可以写成一行,称为行向量;n维向量写成一列,称为列向量。
行向量的下标一般是1xN,1 × N 代表“1 行、N列”,N × 1 代表“N 行、1 列”;
利用 NumPy 库,可以用 numpy.array([[1, 2, 3,…n]]) 定义行向量。用numpy.array([[1], [2], [3],…[n]) 定义 列向量。
注意,定义向量时如果只用一层中括号 [],比如 numpy.array([1, 2, 3]),得到的结果只有一个维度;有两层中括号 [[]],numpy.array([[1, 2, 3]]) 得到的结果有两个维度。
向量中也有反向量、零向量、等向量等。若一个向量与它的大小相同,但方向相反,则称它为反向量,一般记作
−
v
⃗
-\vec{v}
−v。若一个向量的始点与终点重合,也就是重合点的向量,即
0
⃗
=
A
A
⃗
=
B
B
⃗
\vec{0}=\vec{AA}=\vec{BB}
0=AA=BB,则称它为零向量。零向量具有方向性,但方向不定。若两个向量长度、方向相等,即为等向量。规定长度为1的向量为单位向量,可以把一个非零向量归一化为一个单位向量,如等式所示:
对于坐标系中的两个点
A
(
x
0
,
y
0
)
,
B
(
x
1
,
y
1
)
A(x_0,y_0),B(x_1,y_1)
A(x0,y0),B(x1,y1)组成的向量
A
B
⃗
=
(
x
1
−
x
0
,
y
1
−
y
0
)
\vec{AB}=(x_1-x_0,y_1-y_0)
AB=(x1−x0,y1−y0),同理得:
B
A
⃗
=
(
x
0
−
x
1
,
y
0
−
y
1
)
\vec{BA}=(x_0-x_1,y_0-y_1)
BA=(x0−x1,y0−y1)
行向量转置 (transpose) 得到列向量;同理,列向量转置得到行向量。
1.2 向量的运算
1.2.1 向量相加减
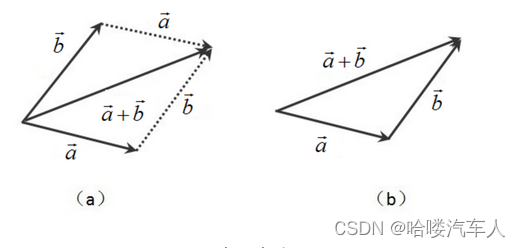
向量的加法满足平行四边形法则和三角形法则。具体地,两个矢量和相加,得到的是另一个向量。这个向量可以表示为和的起点重合后,以它们为邻边构成的平行四边形的一条对角线,或者表示为将的终点和的起点重合后,从的起点指向的终点的向量,如图2所示,图(a)是平行四边法法则,图(b)是三角形法则。
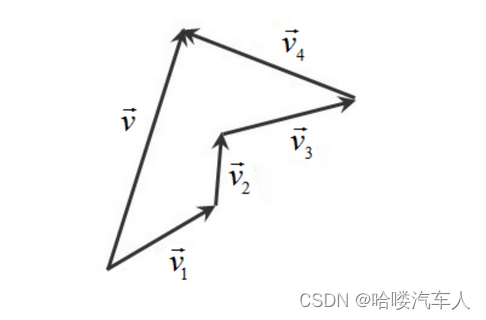
当多个向量相加时,例如求个k向量
v
1
⃗
,
v
2
⃗
,
v
3
⃗
,
.
.
.
,
v
k
⃗
\vec{v_1},\vec{v_2},\vec{v_3},...,\vec{v_k}
v1,v2,v3,...,vk相加得到的向量,这个向量可以表示为将第i(i<k)个向量的起点和第(i+1)个向量的终点重合后,从
v
1
⃗
\vec{v_1}
v1的起点指向
v
1
⃗
,
v
2
⃗
,
v
3
⃗
,
.
.
.
,
v
k
⃗
\vec{v_1},\vec{v_2},\vec{v_3},...,\vec{v_k}
v1,v2,v3,...,vk的终点的向量,如图3所示。
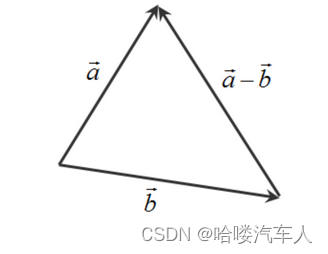
两个向量
a
⃗
\vec{a}
a和
b
⃗
\vec{b}
b的相减,则可以看成是向量
a
⃗
\vec{a}
a加上一个与
b
⃗
\vec{b}
b大小相等,方向相反的向量。或者,
a
⃗
\vec{a}
a和
b
⃗
\vec{b}
b的相减得到的向量可以表示为
a
⃗
\vec{a}
a和
b
⃗
\vec{b}
b的起点重合后,从
b
⃗
\vec{b}
b的终点指向
a
⃗
\vec{a}
a的终点的向量,如图4所示。
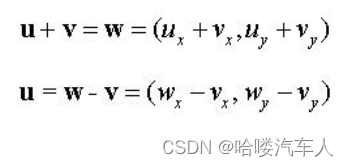
如果用坐标表示向量的加减如下:
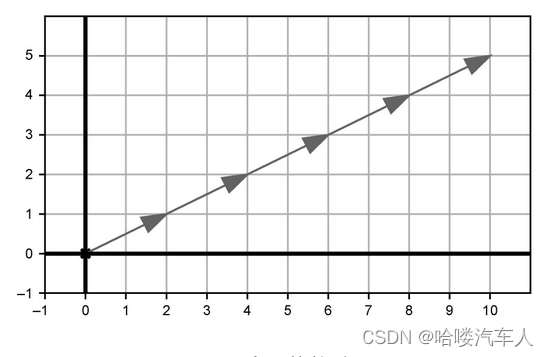
1.2.2向量与数相乘
向量与数相乘相当于向量的重复相加,一个标量k和一个向量
v
⃗
\vec{v}
v之间可以做乘法,得出的结果是另一个与
v
⃗
\vec{v}
v方向相同或相反,大小是
v
⃗
\vec{v}
v的大小的|k|倍的向量,可以记成
k
v
⃗
k\vec{v}
kv,实际上就是k个
v
⃗
\vec{v}
v相加。-1乘以任意向量会得到它的反向量,0乘以任何向量都会得到零矢量。如图5所示,对5个(2, 1)向量求和,得到的向量如下:
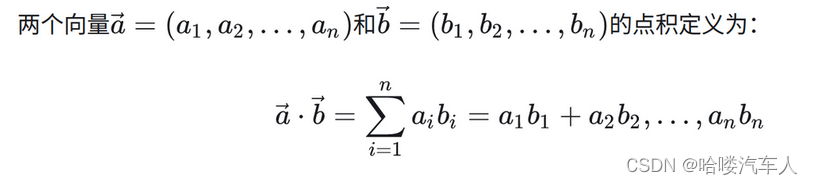
1.2.3 点积运算
定义:已知两个非零向量
a
⃗
.
b
⃗
\vec{a}.\vec{b}
a.b,作OA=a,OB=b,则∠AOB称作向量a和向量b的夹角,记作θ并规定0≤θ≤π
定义:两个向量的数量积(内积、点积)是一个数量(没有方向),记作a·b。
这里要求一维向量a和向量b的行列数相同。
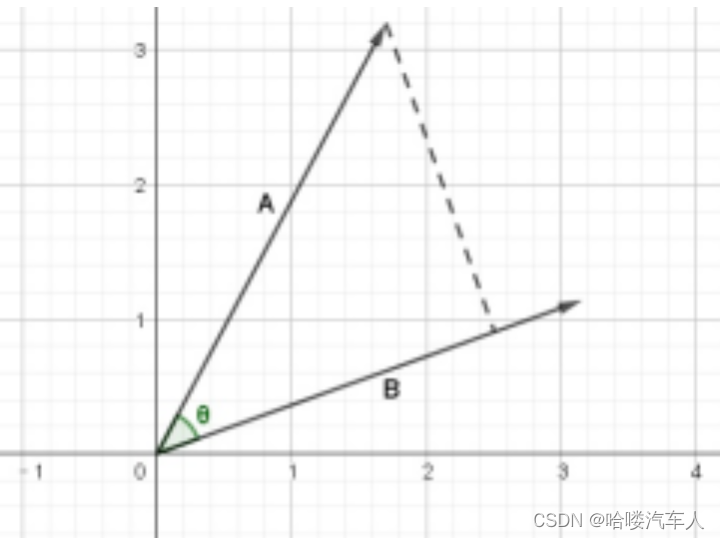
从几何的角度理解内积,两个向量的内积几何意义是投影

特别地,0·a =a·0 = 0;若a,b是非零向量,则a与b正交(垂直)的充要条件是a·b = 0。
点乘的结果是一个数,,比如下图A . B的值为向量A在向量B方向上的投影。
向量的点乘的应用
向量的点乘可以用来计算两个向量之间的夹角,进一步判断这两个向量是否正交(垂直)等方向关系。同时,还可以用来计算一个向量在另一个向量方向上的投影长度。
点乘的应用主要有计算角度、计算面积、检测正交性。计算角度的公式如下:
计算面积例如:求任给多边形的面积,多边形给出了每个定点坐标,先把所有的多边形分解成多个三角形,然后只要能求出三角形面积,问题就解决了。
其次是判断两个向量是否同一方向或正交(即垂直)等方向关系,具体对应关系为:
a∙b>0→方向基本相同,夹角在0°到90°之间
a∙b=0→ 正交,相互垂直
a∙b<0→ 方向基本相反,夹角在90°到180°之间
1.2.3 叉乘运算
定义:两个向量a和b的向量积(外积、叉积)是一个向量,记作a×b(这里“×”并不是乘号,只是一种表示方法,与“·”不同,也可记做“∧”)。若a、b不共线,则a×b的模是:∣a×b∣=|a||b|·sin〈a,b〉;a×b的方向是:垂直于a和b,且a、b和a×b按这个次序构成右手系。若a、b垂直,则∣a×b∣=|a||b|(此处与数量积不同,请注意),若a×b=0,则a、b平行。叉乘运算结果是一个向量而不是一个标量,向量积即两个不共线非零向量所在平面的一组法向量,并且两个向量的外积与这两个向量组成的坐标平面垂直。
向量
a
⃗
\vec{a}
a和
b
⃗
\vec{b}
b的外积
a
⃗
\vec{a}
ax
b
⃗
\vec{b}
b是一个向量,其长度等于|a||b|sin∠(a,b),其方向正交于a与b。并且,(
a
⃗
\vec{a}
a,
b
⃗
\vec{b}
b,
a
⃗
\vec{a}
ax
b
⃗
\vec{b}
b) 构成右手系。特别地,0×a = a×0 = 0.此外,对任意向量a,a×a=0。
对于二维向量来说,叉积的定义是:
![[图片]](https://img-blog.csdnimg.cn/direct/fddda8a9fc4f4815a14946f61a546c95.png)
二维向量叉积是一种特殊情况,它的结果是一个标量而非向量,从几何上定义为:
![[图片]](https://img-blog.csdnimg.cn/direct/bae89b6d56134c19af1857f6cd8d4a44.png)
其中,
θ
{\theta}
θ表示向量
a
⃗
\vec{a}
a和
b
⃗
\vec{b}
b之间逆时针方向的夹角大小。因此,二维向量叉积的结果是以和为边的平行四边形的面积,如图所示。叉积的顺序影响结果的正负号,如果置换叉积的顺序,即,那么结果是一个负数。
![[图片]](https://img-blog.csdnimg.cn/direct/b6b659b6d951422fb26238a2aa8fc549.png)
向量a×向量b(×为向量叉乘),若结果小于0,表示向量b在向量a的顺时针方向;若结果大于0,表示向量b在向量a的逆时针方向;若等于0,表示向量a与向量b平行。(顺逆时针是指两向量平移至起点相连,从某个方向旋转到另一个向量小于180度)。
1.2.4 点乘叉乘的具体应用及面试题
这部分是我以前面试遇到的题目,基本上都是与向量的运算相关,大致记录一下,后面到apollo中的 LineSegment2d有具体计算原理。
1.4.1 点乘和叉乘的定义及区别是什么
1.4.2 计算点到线段的最小距离
1.4.3判断点是否在线段上
1.4.4 判断线段是否相交
1.4.5 判断点是否在矩形内部
1.4.6 判断点在线段的哪一侧
给出三个点A(x1,y1)、B(x2,y2)、P(x0,y0),判断P点在线段AB的哪一侧。
如上图所示,向量AB与向量AP叉乘得到的向量是垂直面ABP,根据右手准则可得P点在AB右侧:
AB=(x2-x1,y2-y1);
AP=(x0-x1,y0-y1);
AB x AP=(x2-x1)(y0-y1)-(y2-y1_)(x0-x1)
如果AB x AP小于0则说明P点在AB的右侧,大于0说明在左侧。
1.3 Apollo vec_2d代码
代码注释较为详细。
/******************************************************************************
* Copyright 2017 The Apollo Authors. All Rights Reserved.
*
* Licensed under the Apache License, Version 2.0 (the "License");
* you may not use this file except in compliance with the License.
* You may obtain a copy of the License at
*
* http://www.apache.org/licenses/LICENSE-2.0
*
* Unless required by applicable law or agreed to in writing, software
* distributed under the License is distributed on an "AS IS" BASIS,
* WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
* See the License for the specific language governing permissions and
* limitations under the License.
*****************************************************************************/
/**
* @file
* @brief Defines the Vec2d class.
*/
#pragma once
#include <cmath>
#include <string>
/**
* @namespace planner::common::math
* @brief planner::common::math
*/
namespace planner
{
namespace common
{
namespace math
{
constexpr double kMathEpsilon = 1e-10;
/**
* @class Vec2d
*
* @brief Implements a class of 2-dimensional vectors.
*/
class Vec2d
{
public:
//! Constructor which takes x- and y-coordinates.
constexpr Vec2d(const double x, const double y) noexcept : x_(x), y_(y) {}
//! Constructor returning the zero vector.
constexpr Vec2d() noexcept : Vec2d(0, 0) {}
//! Creates a unit-vector with a given angle to the positive x semi-axis创建与正x半轴成给定角度的单位向量
static Vec2d CreateUnitVec2d(const double angle);
//! Getter for x component
double x() const { return x_; }
//! Getter for y component
double y() const { return y_; }
//! Setter for x component
void set_x(const double x) { x_ = x; }
//! Setter for y component
void set_y(const double y) { y_ = y; }
//! Gets the length of the vector
double Length() const;
//! Gets the squared length of the vector获取向量长度的平方
double LengthSquare() const;
//! Gets the angle between the vector and the positive x semi-axis获取向量和正x半轴之间的角度
double Angle() const;
//! Returns the unit vector that is co-linear with this vector返回与此向量共线的单位向量
void Normalize();
//! Returns the distance to the given vector
double DistanceTo(const Vec2d &other) const;
//! Returns the squared distance to the given vector
double DistanceSquareTo(const Vec2d &other) const;
//! Returns the "cross" product between these two Vec2d (non-standard).二维向量的叉乘。
double CrossProd(const Vec2d &other) const;
//! Returns the inner product between these two Vec2d.二维向量的内积。
double InnerProd(const Vec2d &other) const;
//! rotate the vector by angle.向量旋转一定角度之后得到一个新向量
Vec2d rotate(const double angle) const;
//! rotate the vector itself by angle.按角度旋转向量本身
void SelfRotate(const double angle);
//! Sums two Vec2d
Vec2d operator+(const Vec2d &other) const;
//! Subtracts two Vec2d
Vec2d operator-(const Vec2d &other) const;
//! Multiplies Vec2d by a scalar
Vec2d operator*(const double ratio) const;
//! Divides Vec2d by a scalar
Vec2d operator/(const double ratio) const;
//! Sums another Vec2d to the current one
Vec2d &operator+=(const Vec2d &other);
//! Subtracts another Vec2d to the current one
Vec2d &operator-=(const Vec2d &other);
//! Multiplies this Vec2d by a scalar
Vec2d &operator*=(const double ratio);
//! Divides this Vec2d by a scalar
Vec2d &operator/=(const double ratio);
//! Compares two Vec2d
bool operator==(const Vec2d &other) const;
//! Returns a human-readable string representing this object
std::string DebugString() const;
protected:
double x_ = 0.0;
double y_ = 0.0;
};
//! Multiplies the given Vec2d by a given scalar将给定的Vec2d乘以给定的标量,向量的数乘
Vec2d operator*(const double ratio, const Vec2d &vec);
} // namespace math
} // namespace common
} // namespace apollo
代码相对容易理解,不展开说明了。
我新增了两个函数
一个是计算与另外一个有向线段的夹角,一个是计算一个点绕另外一个点旋转的一定角度得到的新坐标,角度为正时候是逆时针旋转。
void Vec2d::rotate_coord_of_point(const Vec2d &point, const double &theta, Vec2d &NewPoint)
{
NewPoint.set_x(x_ + (point.x() - x_) * cos(theta) - (point.y() - y_) * sin(theta));
NewPoint.set_y(y_ + (point.x() - x_) * sin(theta) + (point.y() - y_) * cos(theta));
}
double Vec2d::AngleTo(const Vec2d &other) const
{
return acos(InnerProd(other) / (Length() * other.Length()));
}

















 1226
1226











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











