







基本定义
直线(straight line)由无数个点构成,点动成线。直线是面的组成成分,并继而组成体。没有端点,向两端无限延伸,长度无法度量。线段(segment),意思是指直线上两点间的有限部分(包括两个端点)。
直线的平面方程
- 一般式
适用于所有直线的方程:
AX+BY+C=0;
假设已知两点坐标为(X1,Y1),(X2,Y2)
A=Y2-Y1
B=X1-X2
C=X2Y1-X1Y2
其中A、B不能同时为0 - 点斜式
知道直线上一点(X1,Y1),并且直线的斜率k存在,则直线可表示为:
Y-Y1=k(X-X1);
即Y=KX+B;
点斜式转一般式:
A = K;
B = -1;
C = B;
标题LineSegment2d类
直线-线段类如下所示,两个构造函数,共有五个成员变量:
Vec2d start_;
Vec2d end_;
Vec2d unit_direction_;
double heading_ = 0.0;
double length_ = 0.0;
其中unit_direction_是指xy方向的基向量,也是单位向量,其xy是向量在x和y轴上的单位方向向量。
unit_direction_ =
(length_ <= kMathEpsilon ? Vec2d(0, 0)
: Vec2d(dx / length_, dy / length_));
/**
* @class LineSegment2d
* @brief Line segment in 2-D.
*/
class LineSegment2d
{
public:
/**
* @brief Empty constructor.
*/
LineSegment2d();
/**
* @brief Constructor with start point and end point.
* @param start The start point of the line segment.
* @param end The end point of the line segment.
*/
LineSegment2d(const Vec2d &start, const Vec2d &end);
private:
Vec2d start_;
Vec2d end_;
Vec2d unit_direction_;
double heading_ = 0.0;
double length_ = 0.0;
};
标题计算点到直线的距离
点到直线的距离公式很简单,apollo里面并没有此函数。
double PointToLineDis(Point3d p, Point3d p1, Point3d p2)
{
double A = p2.y - p1.y;
double B = p1.x - p2.x;
double C = p2.x * p1.y - p1.x * p2.y;
double dis = (A * p.x + B * p.y + C) / sqrt(A * A + B * B);
return dis;
}
判断点在不在线段上IsPointIn
该算法涉及到math中的CrossProd函数。
double CrossProd(const Vec2d &start_point, const Vec2d &end_point_1,
const Vec2d &end_point_2)
{
return (end_point_1 - start_point).CrossProd(end_point_2 - start_point);
}
该函数就是计算三个点构成的平行四边形的面积,分正负,如果面积为0,那么三点共线。
![[图片]](https://img-blog.csdnimg.cn/direct/49fce9244fa141028c7bdbb598376e10.png)
上面的函数看懂了,下面的意思就明显了,如果面积为0那么就共线,否则三点共线,然后再判断该点的x,y在不在start和end两点之间即可。
bool LineSegment2d::IsPointIn(const Vec2d &point) const
{
if (length_ <= kMathEpsilon)
{
return std::abs(point.x() - start_.x()) <= kMathEpsilon &&
std::abs(point.y() - start_.y()) <= kMathEpsilon;
}
const double prod = CrossProd(point, start_, end_);
if (std::abs(prod) > kMathEpsilon)
{
return false;
}
return IsWithin(point.x(), start_.x(), end_.x()) &&
IsWithin(point.y(), start_.y(), end_.y());
}
判断点在线段的哪一侧
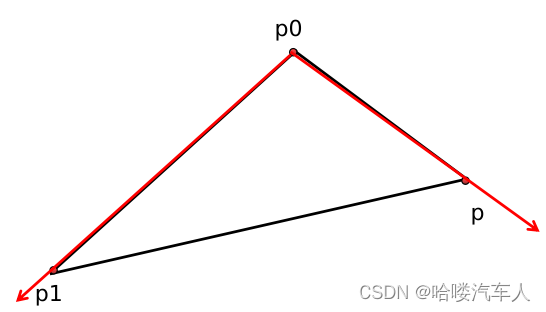
判断原理为叉乘,向量A叉乘向量B,若大于0说明向量B在向量A的逆时针方向。如下图所示,计算向量p0p1和向量p0p的叉乘结果,如果大于零说明向量p0p在p0p1的逆时针方向即左侧,如果小于零说明在顺时针方向右侧。
bool LineSegment2d::LeftOfLine(const Vec2d &p0, const Vec2d &p1,
const Vec2d &p)
{
Vec2d p0p1 = p1 - p0;
Vec2d p0p = p - p0;
double temp = p0p1.CrossProd(p0p);
if (temp >= 0)
{
return true;
}
return false;
}
计算一个点沿着线段移动一定距离得到新的点的坐标
实际上是线性插值
void LineSegment2d::PointAlongLineSegmentMoveDis(Vec2d &point,
const double &dis)
{
point = start_ + (end_ - start_) * (dis / length_);
}
判断两个线段是否相交及交点坐标
首先判断四个端点在不在对方线段上,如果在对方线段上那么返回对应的交点即可。叉乘的几何意义是计算平行四边形的面积,但是这个面积是存在正负之分的,cc1和cc2是判断一个线段是否在另外一个线段的一侧,如果同时为正或者同时为负那么肯定是在同一侧的,否则就可能相交但也不能完全确定(丁字状,不相连的情况),如果cc3和cc4不同时为正或者负值,那么可以确定线段肯定是相交的,其交点的计算如图所示。
bool LineSegment2d::GetIntersect(const LineSegment2d &other_segment,
Vec2d *const point) const
{
// CHECK_NOTNULL(point);
if (IsPointIn(other_segment.start()))
{
*point = other_segment.start();
return true;
}
if (IsPointIn(other_segment.end()))
{
*point = other_segment.end();
return true;
}
if (other_segment.IsPointIn(start_))
{
*point = start_;
return true;
}
if (other_segment.IsPointIn(end_))
{
*point = end_;
return true;
}
if (length_ <= kMathEpsilon || other_segment.length() <= kMathEpsilon)
{
return false;
}
const double cc1 = CrossProd(start_, end_, other_segment.start());
const double cc2 = CrossProd(start_, end_, other_segment.end());
if (cc1 * cc2 >= -kMathEpsilon)
{
return false;
}
const double cc3 =
CrossProd(other_segment.start(), other_segment.end(), start_);
const double cc4 =
CrossProd(other_segment.start(), other_segment.end(), end_);
if (cc3 * cc4 >= -kMathEpsilon)
{
return false;
}
const double ratio = cc4 / (cc4 - cc3);
*point = Vec2d(start_.x() * ratio + end_.x() * (1.0 - ratio),
start_.y() * ratio + end_.y() * (1.0 - ratio));
return true;
}
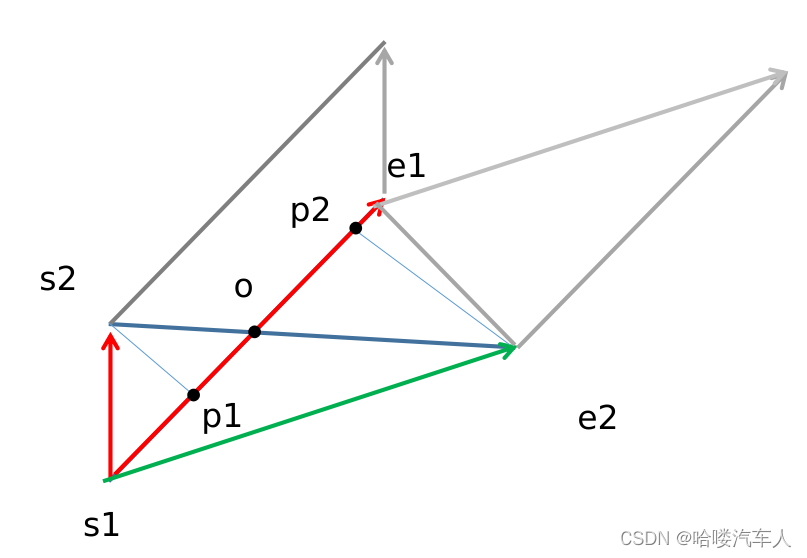
假设s1e2和s2e2是两条线段,那么cc3表示的是平行四边形s1e1s2左侧的那个,cc4表示的是s1e2e1的右侧的平行四边形,两者的符号是相反的,这两个平行四边形是同底边的,假设高分别是s2p1和e2p2,则ratio意思是s1e1e2p2/(s1e1s2p1+s1e1*e2p2)=h2/(h1+h2);三角形os2p1和三角形oe2p2是相似的,所以ratio=e2o/(s2o+oe2);
同理大的三角形也是相似的。
假设ratio=k;
h
2
/
(
h
1
+
h
2
)
=
k
h_2/(h_1+h_2)=k
h2/(h1+h2)=k
s
1
p
1
=
L
∗
(
1
−
k
)
s_1p_1=L*(1-k)
s1p1=L∗(1−k)
可以得到中心点的坐标
double os1=segment.length()(1-ratio);
point =Vec2d(segment.start().x() + os1cos(segment.heading() ) ,
segment.start().y() + os1sin(segment.heading() ));
点到线段的距离在:https://blog.csdn.net/weixin_41766123/article/details/136231734#comments_31379867已经说明过。
线段类基本介绍完了。
以上为个人学习使用,请批评指正,如有侵权,请联系删除。
参考文献
【1】百度apollo源码
[2]百度百科

















 1298
1298











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











