









在apollo的common中没有圆相关的计算,而在路径规划领域圆相关的计算也有一些应用,尤其是泊车规划,目前整理了一些基本的公式使用。
基本定义
定一个圆为圆心坐标和半径r
class Circle
{
private:
double x_;
double y_;
double r_;
Circle() : x_(0), y_(0), r_(0) {}
Circle(double a, double b, double c) : x_(a), y_(b), r_(c) {}
}
圆的方程有一般式和标准式:
x2+y2+Dx+Ey+F=0, (D2+E2-4F>0),或可以表示为
(
x
+
D
/
2
)
2
+
(
x
+
E
/
2
)
2
=
(
D
2
+
E
2
−
4
F
)
/
4
(x+D/2)^2+(x+E/2)^2=(D^2+E^2-4F)/4
(x+D/2)2+(x+E/2)2=(D2+E2−4F)/4
如果(1)圆半径长r;(2)中心A的坐标(a,b),标准方程就是:
(
x
−
a
)
2
+
(
y
−
b
)
2
=
r
2
(x-a)^2+(y-b)^2=r^2
(x−a)2+(y−b)2=r2
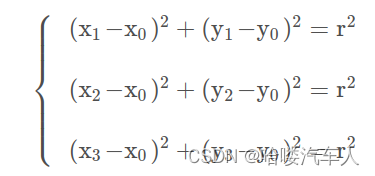
三点确定一个圆心
设圆心坐标O为
(
x
0
,
y
0
)
(x_0,y_0)
(x0,y0),半径为r,三个点的坐标分别是,A
(
x
1
,
y
1
)
(x_1,y_1)
(x1,y1),B
(
x
2
,
y
2
)
(x_2,y_2)
(x2,y2)),C
(
x
3
,
y
3
)
(x_3,y_3)
(x3,y3)
根据三个点到圆心的距离相等:
化简可以得到:
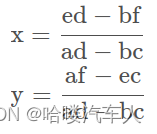
其中:
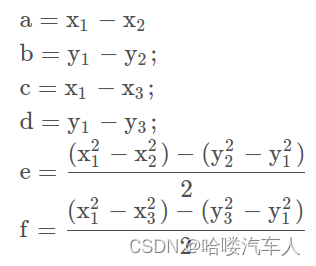
此处参考:三点定圆推导公式
首先判断三点是否共线,如果共线则不存在圆
bool Circle::CalCircle(const Vec2d &pt1, const Vec2d &pt2, const Vec2d &pt3, Vec2d ¢er)
{
if (Line::ThreePointsIsCollinear(pt1, pt2, pt3))
{
return false;
}
double a = pt1.x() - pt2.x();
double b = pt1.y() - pt2.y();
double c = pt1.x() - pt3.x();
double d = pt1.y() - pt3.y();
double e = ((pt1.x() * pt1.x() - pt2.x() * pt2.x()) - (pt2.y() * pt2.y() - pt1.y() * pt1.y())) / 2;
double f = ((pt1.x() * pt1.x() - pt3.x() * pt3.x()) - (pt3.y() * pt3.y() - pt1.y() * pt1.y())) / 2;
// 圆心位置
double x = (e * d - b * f) / (a * d - b * c);
double y = (a * f - e * c) / (a * d - b * c);
center.set_x(x);
center.set_y(y);
r_ = center.DistanceTo(pt1);
center_ = center;
return true;
}
计算两个圆的位置关系并且求出交点
利用圆心距与两圆半径之间的关系来判断两圆的位置关系。假设 d c dc dc为圆心距, R R R与 r r r分别是两圆的半径,则:
(1) dc>R+r,两圆外离;
(2) dc=R+r,两圆外切;
(3) |R – r|< d c < |R + r| ,两圆相交;
(4) dc = |R – r| ,两圆内切;
(5) 0 < = d c < |R – r| ,两圆内含。
// 两个圆的位置关系存在五种,分别是外离,外切,相交,内切,内含分别对应12345;
int Circle::PosRelationToOtherCircle(const Circle &other_circle, Vec2d &p1, Vec2d &p2)
{
double dis = center_.DistanceTo(other_circle.center_);
double r1 = r_;
double r2 = other_circle.r();
if (dis - (r1 + r2) > 0)
{
// std::cout << "两圆外离" << endl;
return 1;
}
else if (dis == (r1 + r2))
{
IntersectionToCircle(other_circle, p1, p2);
// cout << "两圆外切" << endl;
return 2;
}
else if ((fabs(r1 - r2) - dis < 0) && (dis - (r1 + r2) < 0))
{
IntersectionToCircle(other_circle, p1, p2);
// cout << "两圆相交" << endl;
return 3;
}
else if (dis == abs(r1 - r2))
{
IntersectionToCircle(other_circle, p1, p2);
// cout << "两圆内切" << endl;
return 4;
}
else
{
// cout << "两圆内含" << endl;
return 4;
}
}
圆与圆的交点计算后续补充。
圆与直线的位置关系及交点计算
假设直线方程和圆的方程为:
y
=
k
x
+
c
y=kx+c
y=kx+c
(
x
−
a
)
2
+
(
y
−
b
)
2
=
r
2
(x-a)^2+(y-b)^2=r^2
(x−a)2+(y−b)2=r2
联立两个方程可以得到:
(
1
+
k
2
)
x
2
+
x
[
2
k
(
c
−
b
)
−
2
a
]
+
a
2
+
(
c
−
b
)
2
−
r
2
=
0
(1+k^2)x^2+x[2k(c-b)-2a]+a^2+(c-b)^2-r^2=0
(1+k2)x2+x[2k(c−b)−2a]+a2+(c−b)2−r2=0
这里主要是使用圆的方程和直线方程联合求解,得到一个一元二次方程,这个二次方程的解就是交点坐标的x值。
// calculate intersection point of a line and a circle
// return 0 无交点,1.一个交点,2是两个交点
int Circle::IntersecLine(const Line &line, Vec2d &p0, Vec2d &p1)
{
// get known line A B C
float A, B, C;
A = line.A_;
B = line.B_;
C = line.C_;
float x0, x1, y0, y1;
// calculate intersection
float k, b, AA, BB, CC;
int nRet = 0;
if (fabs(A) < kMathEpsilon && fabs(B) < kMathEpsilon)
{
return 0;
}
if (fabs(B) > kMathEpsilon)
{
k = -A / B;
b = -C / B;
AA = 1 + k * k;
BB = 2 * (k * b - x_ - k * y_);
CC = pow(x_, 2) + pow((b - y_), 2) - r_ * r_;
if (SolveEquation::QuadraticEquation(AA, BB, CC, x0, x1))
{
y0 = k * x0 + b;
y1 = k * x1 + b;
nRet = 2;
}
}
else
{
b = -C / A;
x0 = b;
x1 = b;
if (pow(r_, 2) >= pow(x_ - b, 2))
{
nRet = 2;
y0 = sqrt(r_ * r_ - pow((x_ - b), 2)) + y_;
y1 = y_ - sqrt(r_ * r_ - pow((x_ - b), 2));
}
else
{
nRet = 0;
}
}
if (nRet != 0)
{
p0.set_x(x0);
p0.set_x(y0);
p1.set_x(x1);
p1.set_x(y1);
}
return nRet;
}
已知两直线,求其相切圆
已经知道两条直线的方程L0,L1,求与其相切的圆的坐标,半径(已知)。
后续补充。
已知两个点在圆上,求两圆相切时的半径
针对平行车位(右侧车位,左侧车位转到右侧计算)来说,常见的场景如下图所示:
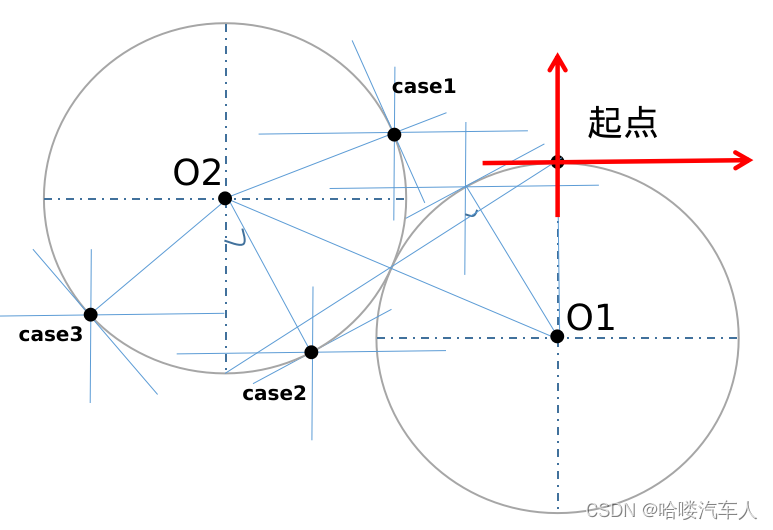
左侧的为入库点,可能存在情况基本为如图所示的三种,而这三种case计算圆心坐标的方式只有一种:
O
1
.
x
=
0
;
O
1
.
y
=
−
r
;
O
2
.
x
=
x
1
−
r
∗
s
i
n
(
θ
)
;
O
2
.
y
=
y
1
+
r
∗
c
o
s
(
θ
)
;
O_1.x=0; O_1.y=-r; O_2.x=x_1-r*sin(\theta); O_2.y=y_1+r*cos(\theta);
O1.x=0;O1.y=−r;O2.x=x1−r∗sin(θ);O2.y=y1+r∗cos(θ);
其中x1,y1是新坐标系下的目标点的坐标。
那么可以列方程:两圆心之间的距离=2*r;
这样可以得到一个一元二次方程。
double a = sin(t1) * sin(t1) + (1 + cos(t1)) * (1 + cos(t1)) - 4;
double b = -2 * sin(t1) * x1 + 2 * (1 + cos(t1)) * y1;
double c = x1 * x1 + y1 * y1;
求出半径即可。
以上为个人学习使用,请批评指正,如有侵权,请联系删除。
参考文献
【1】https://blog.csdn.net/qq_45874328/article/details/114934147

















 2532
2532











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











