







计算点到线段的最短距离,在路径规划领域使用较多,是为基础函数,降低其耗时,对整个规划的效率有益。
先以apollo中使用DistanceTo函数实现为例。
double LineSegment2d::DistanceTo(const Vec2d &point) const
{
if (length_ <= kMathEpsilon)
{
return point.DistanceTo(start_);
}
const double x0 = point.x() - start_.x();
const double y0 = point.y() - start_.y();
const double proj = x0 * unit_direction_.x() + y0 * unit_direction_.y();
if (proj <= 0.0)
{
return hypot(x0, y0);
}
if (proj >= length_)
{
return point.DistanceTo(end_);
}
return std::abs(x0 * unit_direction_.y() - y0 * unit_direction_.x());
}
如果长度很小那么该线段只是一个点,计算两点之间的距离即可。
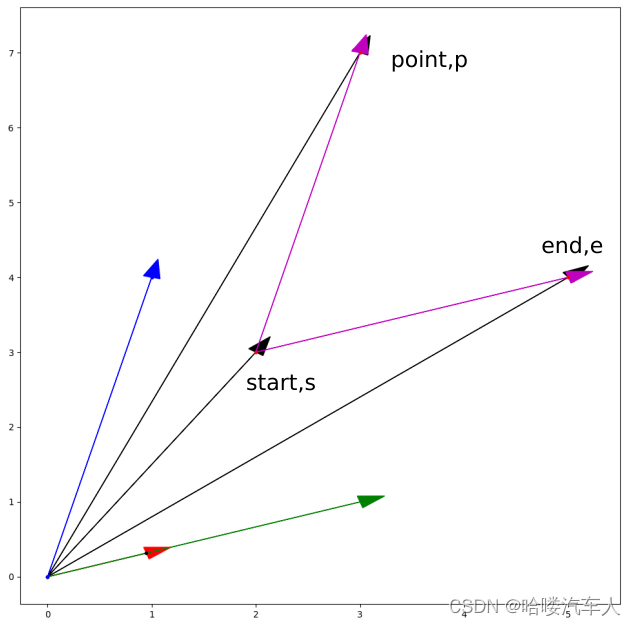
x0,y0组成的向量即为向量SP,unit_direction_为向量SE的单位向量图中红色的箭头,
那么proj的结果是向量SP和向量unit_direction_的内积,内积的大小是指向量SP在单位向量unit_direction_的投影,如果这个投影距离大于了线段的长度,那么说明该点point距离end_点是最近的,只需要返回这两个点之间的距离即可。
std::abs(x0 * unit_direction_.y() - y0 * unit_direction_.x());
上面这一句明显是叉乘的结果,叉乘的含义是两个向量组成的平行四边形的面积,由于unit_direction_是单位向量,那么该面积实际上就是垂线。
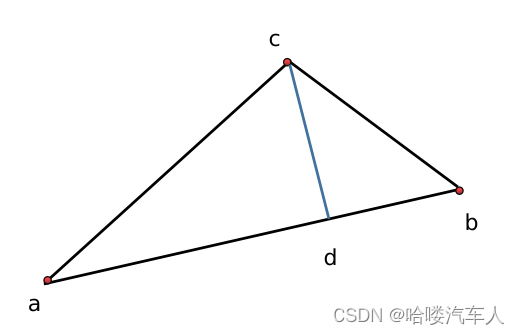
下面是另外求线段到点的最短距离的算法
假设线段是ab,求点c到线段的距离,其原理是算出三个点的相互距离,找出线段ac.bc中最大的一个max_cab,求出c点到直线ab的距离c_ab,然后用max_cab的平方-c_ab的平方得到的实际上就是ad的距离,如果ad长度小于线段长度,那么垂足就在线段上,如果大于ab那么垂足就在线段之外,只需要取ac,bc的最小值即可。
double Point2LineSegment(const Point3d &c, const Point3d &a, const Point3d &b)
{
auto dis_between2points = [](const Point3d &Point1, const Point3d &Point2) -> double
{
return sqrt((Point1.x - Point2.x) * (Point1.x - Point2.x) + (Point1.y - Point2.y) * (Point1.y - Point2.y));
};
double min_dis = 0;
// 先求出三个点之间的距离
double ac = dis_between2points(a, c);
double ab = dis_between2points(a, b);
double bc = dis_between2points(c, b);
double max_cab = max(ac, bc);
// 计算点c到直线AB的距离
// 根据两个点的坐标求直线方程
double A = b.y - a.y;
double B = a.x - b.x;
double C = b.x * a.y - a.x * b.y;
auto distance2Line = [](const double x, const double y, const double A, const double B, const double C) -> double
{
return std::abs(A * x + B * y + C) / std::sqrt(A * A + B * B);
};
double c_ab = distance2Line(c.x, c.y, A, B, C);
double delt = pow(max_cab, 2) - pow(c_ab, 2);
if (delt > ab * ab)
{
// 说明垂足在线段之外
min_dis = min(ac, bc);
}
else
{ // 说明垂足在线段之内
min_dis = c_ab;
}
return min_dis;
}
以下是测试用例:
planner::common::math::Vec2d p0(2, 3);
planner::common::math::Vec2d p1(5, 4);
planner::common::math::Vec2d p2(3, 7);
planner::common::math::LineSegment2d line_segment2d_(p0, p1);
double dis1 = line_segment2d_.DistanceTo(p2);
//
planner::common::math::Vec2d unit_direction_;
const double dx = p1.x() - p0.x();
const double dy = p1.y() - p0.y();
double length_ = hypot(dx, dy);
unit_direction_ =
(planner::common::math::Vec2d(dx / length_, dy / length_));
const double x0 = p2.x() - p0.x();
const double y0 = p2.y() - p0.y();
const double proj = x0 * unit_direction_.x() + y0 * unit_direction_.y();
if (proj <= 0.0)
{
// return hypot(x0, y0);
}
if (proj >= length_)
{
// return p2.DistanceTo(p1);
}
double dis4 = std::abs(x0 * unit_direction_.y() - y0 * unit_direction_.x());
//
planner::Point3d O;
planner::Point3d q0(p0.x(), p0.y(), 0);
planner::Point3d q1(p1.x(), p1.y(), 0);
planner::Point3d q2(p2.x(), p2.y(), 0);
planner::Point3d unit_direction(unit_direction_.x(), unit_direction_.y(), 0);
planner::Point3d p02(x0, y0, 0);
planner::Point3d p01(p1.x() - p0.x(), p1.y() - p0.y(), 0);
double dis2 = planner::Point2LineSegment(q2, q0, q1);
MatplotVisualization_.PlotLineSegmentArrow(O, q0, planner::plot_black_arrow);
MatplotVisualization_.PlotLineSegmentArrow(O, q1, planner::plot_black_arrow);
MatplotVisualization_.PlotLineSegmentArrow(O, q2, planner::plot_black_arrow);
MatplotVisualization_.PlotLineSegmentArrow(O, unit_direction, planner::plot_red_arrow);
MatplotVisualization_.PlotLineSegmentArrow(O, p02, planner::plot_blue_arrow);
MatplotVisualization_.PlotLineSegmentArrow(O, p01, planner::plot_green_arrow);
MatplotVisualization_.PlotLineSegmentArrow(q0, q1, planner::plot_magenta_arrow);
// MatplotVisualization_.PlotLineSegmentArrow(q1, q2, planner::plot_magenta_arrow);
MatplotVisualization_.PlotLineSegmentArrow(q0, q2, planner::plot_magenta_arrow);
MatplotVisualization_.PlotOnePoint(q0, planner::plot_red_point);
MatplotVisualization_.PlotOnePoint(q1, planner::plot_red_point);
MatplotVisualization_.PlotOnePoint(q2, planner::plot_red_point);
MatplotVisualization_.PlotOnePoint(unit_direction, planner::plot_black_point);
MatplotVisualization_.PlotOnePoint(p02, planner::plot_green_point);
MatplotVisualization_.PlotOnePoint(p02, planner::plot_blue_point);
MatplotVisualization_.PlotPltPause(0.1);
MatplotVisualization_.PlotShow();
int break_point = 0;
下面是耗时比较:
planner::common::math::Vec2d p0(2, 3);
planner::common::math::Vec2d p1(5, 4);
planner::common::math::Vec2d p2(3, 7);
auto start_time1 = system_clock::now();
for (size_t i = 0; i < 10000; i++)
{
planner::common::math::LineSegment2d line_segment2d_(p0, p1);
double dis1 = line_segment2d_.DistanceTo(p2);
}
duration<double> cost_time1 = system_clock::now() - start_time1;
cout << "LineSegment2d time: " << cost_time1.count() << std::endl;
auto start_time3 = system_clock::now();
for (size_t i = 0; i < 10000; i++)
{
double dis1 = planner::common::math::LineSegment2d::DistanceToLineSegment(p2,p0,p1) ;
}
duration<double> cost_time3 = system_clock::now() - start_time3;
cout << "DistanceToLineSegment time: " << cost_time3.count() << std::endl;
planner::Point3d q0(p0.x(), p0.y(), 0);
planner::Point3d q1(p1.x(), p1.y(), 0);
planner::Point3d q2(p2.x(), p2.y(), 0);
auto start_time2 = system_clock::now();
for (size_t i = 0; i < 10000; i++)
{
double dis2 = planner::Point2LineSegment(q2, q0, q1);
}
duration<double> cost_time2 = system_clock::now() - start_time2;
cout << "Point2LineSegment time: " << cost_time2.count() << std::endl;
耗时的结果(单位:s)如下所示,类的构建是很耗时的,采用静态函数,可以提高计算速度。
LineSegment2d time: 0.00124451
DistanceToLineSegment time: 0.0002523
Point2LineSegment time: 0.00047673
以上为个人学习使用,请批评指正,如有侵权,请联系删除。
参考文献
【1】百度apollo源码















 869
869











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









