







倍福软件安装及注意事项
一、TwinCat3安装(先安装VS)
1.1TwinCAT3 Full 版安装步骤
1.2最后安装帮助文档
二、TCP/IP通信
2.1.PC与PLC相连
2.1.1IP地址设置
2.1.2PC控制PLC
2.2TCP/IP通信
2.2.1在链接传感器之前,可使用cdx seeker读取传感器IP地址、PORT号。
2.2.2PC读取传感器数据
三、PLC调用C++工程
3.1.环境配置
3.1.1安装一个很重要的插件: “Windows Driver Kit” (WDK) 安装这个插件是为了能在 TwinACT 3 工程环境创建和编辑 C++模块。
3.1.2 在开发电脑中创建并安装数字证书
3.1.3在 64 位目标控制器中安装数字证书
3.2创建 C++模块步骤
3.3创建 PLC 项目调用 C++模块(PLC和C++不要放在一个工程里)
3.4PLC和C++的I/O端口映射
3.4.1创建C++中I/O变量
3.3.2在PLC中创建I/O端口
一、TwinCat3安装(先安装VS)
这里我们就介绍如何安装 TwinCAT3 4020 Full 版本和 Infosys(帮助文档)。
1.1TwinCAT3 Full 版安装步骤
1)首先安装 TwinCAT3 Full 版本,安装包可以从 beckhoff 官方网站进行下载。
(2) 双击打开 TwinCAT3 Full 文件安装包进行安装。(安装前卸载各类安全卫士和杀毒软件)
(3)这里可以选 complete 即可。
选custom可自定义安装路径,安装文件默认即可。
(4)选VS环境,红框内也要勾选
(5)点击 Install 进行安装,安装好后选择 Yes 重启。
1.2最后安装帮助文档
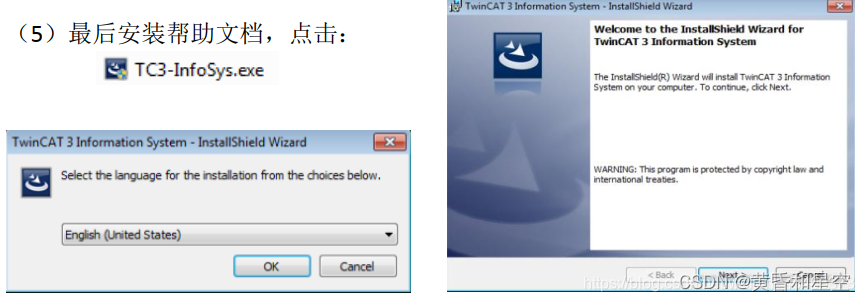
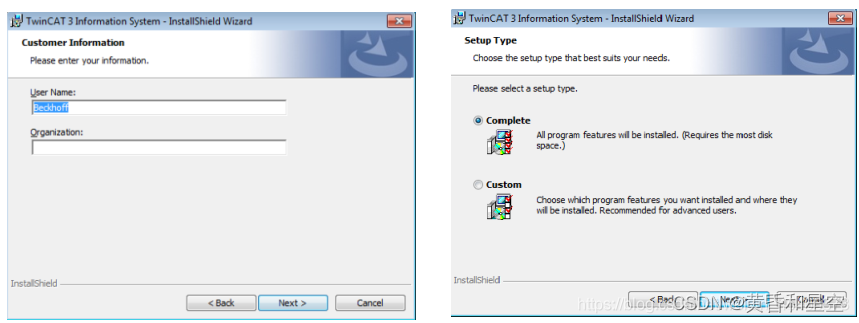
2.到了这一步我们可以直接选 complete 并且下一步
-
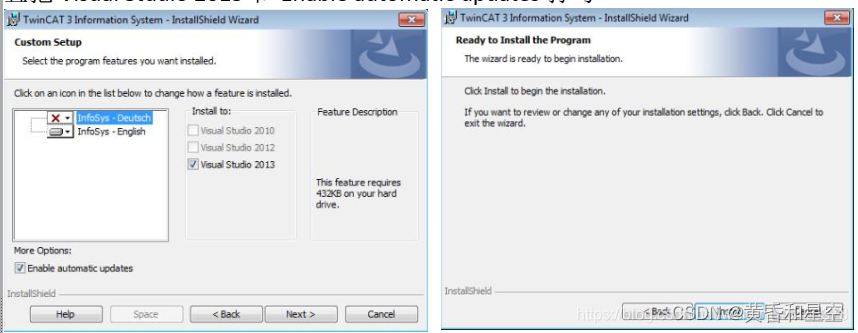
也可以选择 custom,这样你就可以只选择你所需要的帮助文档的语言, 并
且把 Visual Studio 2013 和 Enable automatic updates 打勾
-
选择 Yes
-
选择 Yes
-
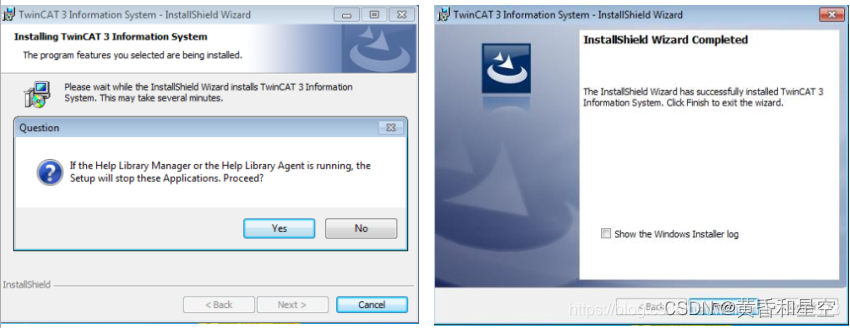
注:若帮助文档没安装成功不影响使用
这样就完成了 TwinCAT3 的安装。
win10系统需在安装路径下(我的为E:\TwinCAT\3.1\System),以管理员身份运行win8settick.bat文件,重启电脑即可使用。
二、TCP/IP通信
先安装 TF6310-TCP-IP.exe ,点默认即可。
2.1.PC与PLC相连
2.1.1IP地址设置
注:在和PLC控制器相连前关掉防火墙
按照图片中的路径设置IP地址和子网编码,前两个数字必须和PLC控制器是一样的,PLC控制器0端口的IP地址为169.254.231.32,子网编码为255.255.0.0
2.1.2PC控制PLC
在SYSTEM下添加Target,按照图片中设置即可,输入IP地址点Enter Host Name/IP即可搜索到PLC。点Add Route会弹出一个窗口,不勾选ads,添加后connected下会出现一个x即代表连接成功,关掉这个窗口后在弹出的窗口中都点OK按钮。
2.2TCP/IP通信
2.2.1在链接传感器之前,可使用cdx seeker读取传感器IP地址、PORT号。
2.2.2PC读取传感器数据
使用NetAssist.exe
0x-16位,30 02-表示发送读取命令,0D 60-读取的ch1的数据
2.2.3PLC读取传感器数据
注:PC和PLC连接端口是一个地址,PLC和传感器连接端口是一个地址
使用PLC做client,传感器做server。发送命令时,命令中包含几位字符就定义几位的数组,如30 02 0D 60就定义4位的数组,一位包含两个数字,两位为一个字节。
发送命令后就可在ReceiveByte中读取到16进制的测量数据。
三、PLC调用C++工程
3.1.环境配置
3.1.1安装一个很重要的插件: “Windows Driver Kit” (WDK) 安装这个插件是为了能在 TwinACT 3 工程环境创建和编辑 C++模块。
(1)双击 KitSetup.exe
(2)选择“Build Environment”后点击 OK
(3)弹出窗口点击 OK,选默认即可,后续还会用到路径



















 2237
2237

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











