










这里写自定义目录标题
大多数文章介绍move_group_interface都停留在对其成员函数的使用,plan()、execute()、move()等,但对其内部结构流程探究的很少。move_group_interface是Action的消息机制,并连接ompl库进行的运动规划和轨迹生成。下面来对move_group_interface中的plan()函数做深入了解,并借此学习Moveit!的Action。
1、move_group简介
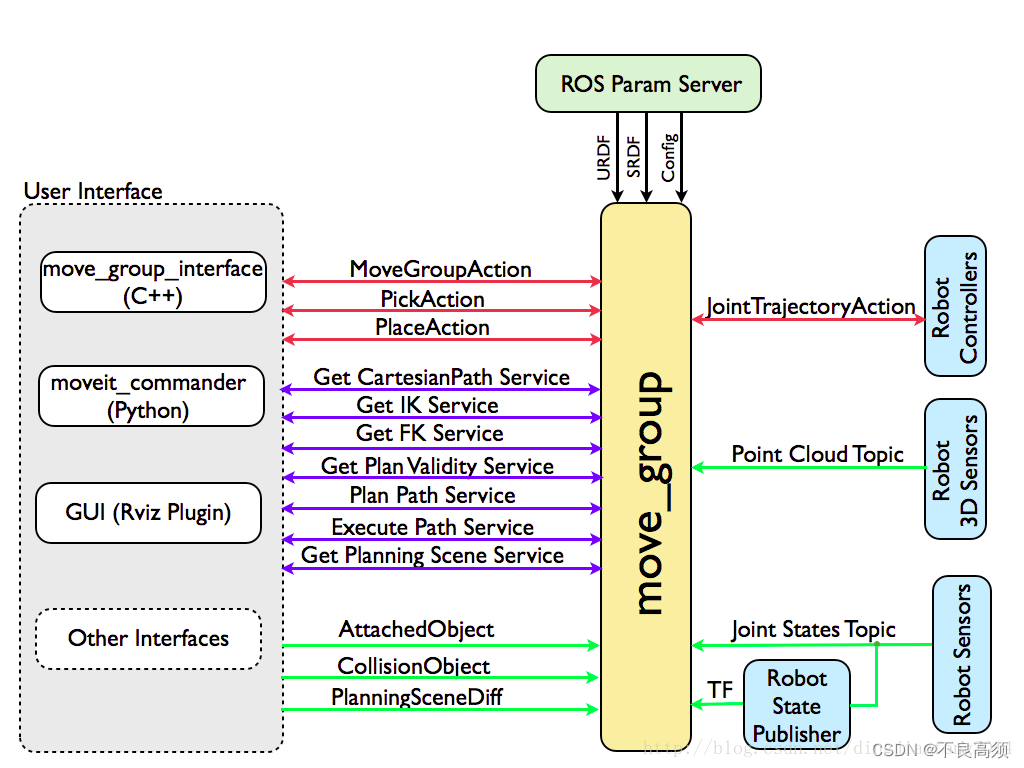 move_group是Moveit!的核心组件,综合机器人的各独立组件,为用户提供一系列的动作指令和服务。
move_group是Moveit!的核心组件,综合机器人的各独立组件,为用户提供一系列的动作指令和服务。
其中用户接口move_group_interface.cpp是C++的程序接口。moveit_commander.py是为Python提供的API 。GUI是rviz的插件,三种接口都一样,可以布置场景,设置碰撞,指定目标点等操作。
ROS参数服务器为move_group提供三种信息,URDF是机器人模型描述,SRDF是模型描述信息,Config是机器人配置的关节限位,运动学插件和运动规划插件等。
move_group和机器人之间的通讯通过Action和Topic。话题通讯很简单不再说明,下面简单介绍动作的通讯。
2、Action简单学习
2.1、action消息定义
Action是一种类似Service的问答通讯机制,不过Action带有连续反馈,可以在执行过程中反馈任务进度,也可中途中止任务。action通过*.action文件定义,格式如下:
int Goal //定义Action的目标
---
char Feedback //定义Action的反馈
---
bool Result //定义Action的结果
将其命名为text.action并链接编译后,会生成一系列.msg文件。
2.2、action使用:客户端
客户端用于发出action的目标,接收反馈和最终结果。
#include <actionlib/client/simple_action_client.h>
#include <ros/ros.h>
#include "move_msgs/text.h"
typedef actionlib::SimpleActionClient<moveit_msgs::text> Client;
void donecb (const moveit_msgs::textGoalState& state,
const moveit_msgs::textResultConstPtr& re)
{
ROS_INFO("Finish!");
ros::shutdown();
}
void activecb()
{
ROS_INFO("Start")
}
void feedbackcd (const moveit_msgs::textConstPtr& fb)
{
ROS_INFO("feedback is %c", fb->feedback);
}
int main (int argc, char ** argv)
{
ros::init(argc, argv, "text_client");
//定义客户端
Client client("text", true);
//等待服务器连接
client.waitForServer();
//定义目标变量
moveit_msgs::textGoal goal;
//填充目标信息
goal.Goal = 111;
//发送目标消息至服务端,并设置三个回调函数
client.sendGoal(goal, &donecb, &actioncb, &feedbackcb);
ros::spin();
return 0;
}
2.3、action使用:服务端
#include <actionlib/client/simple_action_server.h>
#include <ros/ros.h>
#include "move_msgs/text.h"
typedef actionlib::SimpleActionServer<moveit_msgs::text> Server;
void execute(const moveit_msgs::textGoalConstPtr& goal, Sever* as)
{
ros::Rate r(1);
moveit_msgs::textFeedback fb;
for (int i=1; i < 10; i++)
{
fb.feedback = 'Y';
as->publishFeedback(fb);
r.sleep();
}
as->setSucceeded();
}
int main (int argc, char ** argv)
{
ros::init(argc, argv,"text_server");
ros::NodeHandle n;
//定义服务器并设置回调函数
Server server(n, "text", boost::bind(&execute, _1, %server), false);
//服务器开始运行
server.start();
ros::spin();
return 0;
}
3、move_group_interface运动规划详解
3.1、机械臂规划例程结构
int main(int argc, char** argv)
{
ros::init(argc, argv, "plan_text");
ros::NodeHandle nh;
ros::AsyncSpinner spin(1);
spin.start();
//通过movegroup设置一个机械臂组,对这个名为arm的机械臂组进行控制规划
moveit::planning_interface::MoveGroupInterface group("arm");
//创建一个变量,名为my_plan,这个Plan是一个结构体,包含机械臂运动的状态和时间信息。
moveit::planning_interface::MoveGroupIntreface::Plan my_plan;
//在设置目标点后,用plan函数,输入为刚刚定义的变量,如果路径成功规划完成,则返回true,并且my_plan是已经规划号的路径。
moveit::planning_interface::MoveitErrorCode success = group.plan(my_plan);
if (success)
//如果成功,则开始执行,rviz中的机械臂开始运动
group.execute(my_plan);
return 0;
}
接下来我们深入学习底层代码,因此必须源码安装Moveit!和OMPL,如果是二进制安装要卸载重装,参考我之前写的博客Ubuntu1804下的Melodic版本Moveit和OMPL的源码安装,并自定义规划算法在Moveit上使用
3.2、深入Plan函数
刚刚我们定义group的时候用的就是move_group中的C++接口:MoveGroupInterface这是一个类,那么这个Plan运动规划函数就是MoveGroupInterface中的一个成员函数。打开move_group_interface.cpp,第793行定义了此函数
moveit::core::MoveItErrorCode plan(Plan& plan)
可以看到此函数的输入为结构体Plan的引用,输出为moveit错误编码,如果为真就是成功无错误。plan函数的主干摘选如下:
moveit::core::MoveItErrorCode plan(Plan& plan)
{
if (!move_action_client_->isServerConnected())
ROS_WARN_STREAM_NAMED(LOGNAME, "move action server not connected");
moveit_msgs::MoveGroupGoal goal;
constructGoal(goal);
goal.planning_options.plan_only = true;
move_action_client_->sendGoal(goal); //发送Action的目标,
if (!move_action_client_->waitForResult()) //等待Action结果
ROS_INFO_STREAM_NAMED(LOGNAME, "MoveGroup action returned early");
if (move_action_client_->getState() == actionlib::SimpleClientGoalState::SUCCEEDED)
{
plan.trajectory_ = move_action_client_->getResult()->planned_trajectory;
plan.start_state_ = move_action_client_->getResult()->trajectory_start;
plan.planning_time_ = move_action_client_->getResult()->planning_time;
return move_action_client_->getResult()->error_code;
}
else
return move_action_client_->getResult()->error_code;
}
首先如人眼帘的是move_action_client_。从名字可以看到这是move_group的一个动作客户端。他的定义如下:
std::unique_ptr<actionlib::SimpleActionClient<moveit_msgs::MoveGroupAction>> move_action_client_;
unique_ptr是智能指针,只能在这个作用域中使用,且不能被多个unipue_ptr指向,保证内存不被泄漏。智能指针unipue_ptr
继续输入的内容和前面action的定义一样,只不过客户端的类型为moveit_msgs::MoveGroupAction。
这个MoveGroupAction是在我们完成.action编译后自动生成的一个头文件:MoveGroupAction.h。打开这个头文件可以看到这是一个结构体存放着三个变量,分别是goal、feedback、result,对应于我们.action的三组变量。
回到plan函数,接下来定义一个变量goal,其类型MoveGroupGoal是这个Action的目标,是一个结构体。
moveit_msgs::MoveGroupGoal goal;
constructGoal(goal);
如果我们在刚刚的MoveGroupAction.h里面一直深入的话。可以看到他也包含有MoveGroupGoal这个结构体。这个结构体包含两个变量request和planning_options,construceGoal函数是对变量goal的request做一些初始化赋值。具体赋值内容不做深究了。
再对goal赋值完毕后,再发送action目标至服务器。sendGoal()函数。然后waitForResult()等待服务端的结果,如果有结果了并且getState()有值,则开始对Plan的引用做赋值拷贝。将Action的getResult结果赋予给plan,最后把error_code输出。完成plan。move_group客户端基本正清楚了,后面看服务端的源码。
3.3、MoveGroupAction的服务端
服务端在接受到客户端发送的目标后,开始进行运动规划,待规划完成后把规划信息保存并返回完成的信号。
打开move_cation_capability.cpp,其中的initialize()函数定义了服务器并设置了回调函数:executeMoveCallback()。
进入executeMoveCallback后,判断是只规划还是规划&执行。对应于rviz上的选项。我们这里只做运动规划,因此进入executeMoveCallbackPlanOnly()函数,此函数的输入为goal和action_res,其中action_res为MoveGroupResult类型。程序摘选如下:
void MoveGroupMoveAction::executeMoveCallback(const moveit_msgs::MoveGroupGoalConstPtr& goal)
{
moveit_msgs::MoveGroupResult action_res;
if (goal->planning_options.plan_only || !context_->allow_trajectory_execution_)
executeMoveCallbackPlanOnly(goal, action_res);
else
executeMoveCallbackPlanAndExecute(goal, action_res);
if (action_res.error_code.val == moveit_msgs::MoveItErrorCodes::SUCCESS)
move_action_server_->setSucceeded(action_res, response);
}
继续查看executeMoveCallbackPlanOnly函数:
void MoveGroupMoveAction::executeMoveCallbackPlanOnly(const moveit_msgs::MoveGroupGoalConstPtr& goal,
moveit_msgs::MoveGroupResult& action_res)
{
ROS_INFO_NAMED(getName(), "Planning request received for MoveGroup action. Forwarding to planning pipeline.");
//运动规划的场景信息
const planning_scene::PlanningSceneConstPtr& the_scene =
(moveit::core::isEmpty(goal->planning_options.planning_scene_diff)) ?
static_cast<const planning_scene::PlanningSceneConstPtr&>(lscene) :
lscene->diff(goal->planning_options.planning_scene_diff);
planning_interface::MotionPlanResponse res;
// Select planning_pipeline to handle request
const planning_pipeline::PlanningPipelinePtr planning_pipeline = resolvePlanningPipeline(goal->request.pipeline_id);
try
{
planning_pipeline->generatePlan(the_scene, goal->request, res);
}
convertToMsg(res.trajectory_, action_res.trajectory_start, action_res.planned_trajectory);
action_res.error_code = res.error_code_;
action_res.planning_time = res.planning_time_;
}
先定义一个规划通道,用于连接ompl库,很明显可以找到generatePlan函数,用于生成路径的。进入generatePlan函数又是一大串程序,核心应该是类planning_interface::PlanningContextPtr的操作和slove函数的执行。实在弄不动了,不过已知的是,要配置并连接ompl库。
3.4、OMPL库的配置和自定义运动规划算法
进入model_based_planning_conterxt.cpp,有一个config函数,此函数用于ompl相关设置,最后程序落脚于useConfig()函数,这个函数就是判断你采用的哪种运动规划算法,并且将一些参数和场景规划信息加载出来。设置好目标点后,最后和运动规划的setup()函数连接。
在跳出useConfig()函数后,就开执行运动规划的setup(),setup又调用他的slove()函数,进行运动规划。
void ompl_interface::ModelBasedPlanningContext::configure(const ros::NodeHandle& nh, bool use_constraints_approximations)
{
loadConstraintApproximations(nh);
// convert the input state to the corresponding OMPL state
ompl::base::ScopedState<> ompl_start_state(spec_.state_space_);
spec_.state_space_->copyToOMPLState(ompl_start_state.get(), getCompleteInitialRobotState());
ompl_simple_setup_->setStartState(ompl_start_state);
ompl_simple_setup_->setStateValidityChecker(ob::StateValidityCheckerPtr(new StateValidityChecker(this)));
useConfig();
if (ompl_simple_setup_->getGoal())
ompl_simple_setup_->setup();
}
你的路径规划算法主要就在对应的solve()函数填写就行了。
4、总结
最后 的generatePlan函数怎么ompl库连接还没有找到,有时间再深入以下。
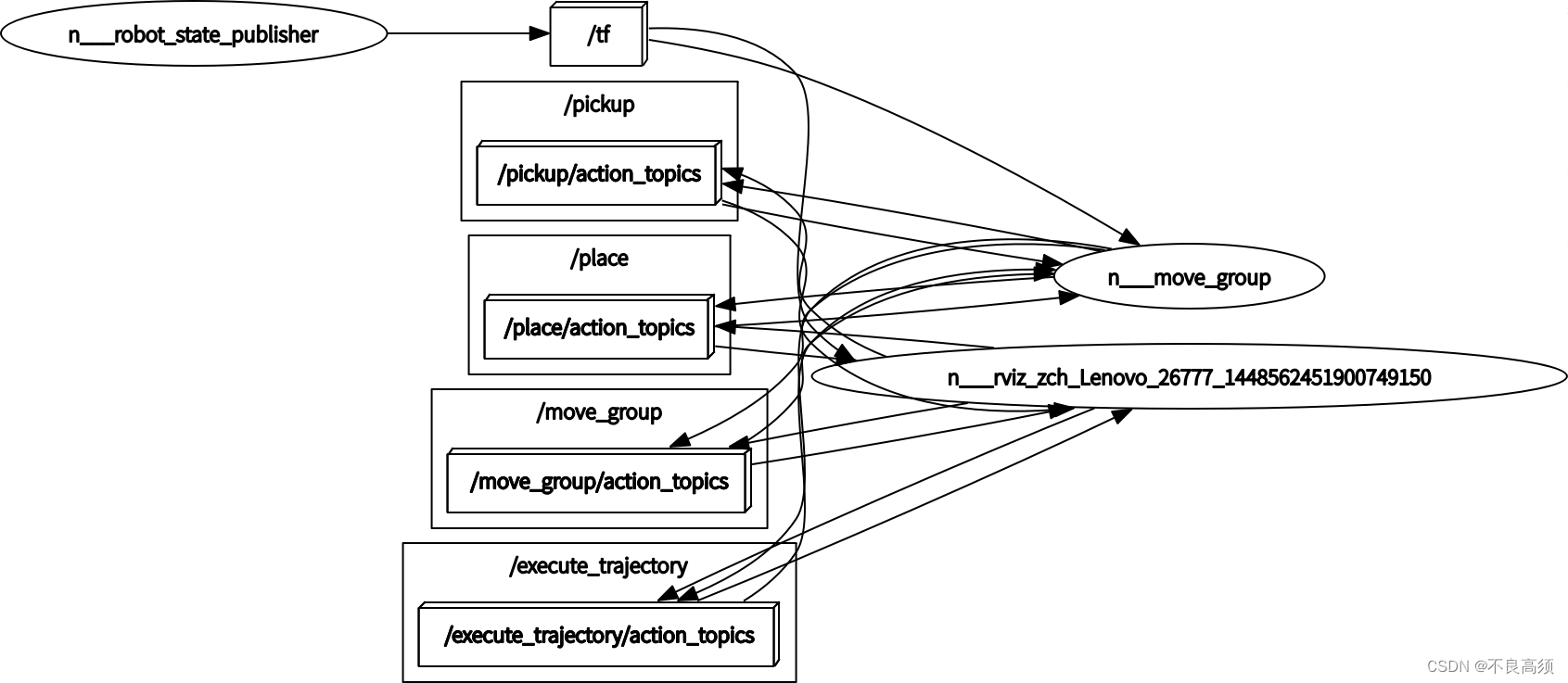
其实move_group_interface.cpp共定义了四个Action:
std::unique_ptr<actionlib::SimpleActionClient<moveit_msgs::MoveGroupAction>> move_action_client_;
std::unique_ptr<actionlib::SimpleActionClient<moveit_msgs::ExecuteTrajectoryAction>> execute_action_client_;
std::unique_ptr<actionlib::SimpleActionClient<moveit_msgs::PickupAction>> pick_action_client_;
std::unique_ptr<actionlib::SimpleActionClient<moveit_msgs::PlaceAction>> place_action_client_;
今天我们只看了move,主要是运动规划生成路径。后面还有执行、抓取、放置,不过思路都是一样的。在move_group_interface.cpp定义其动作的客户端,然后在另外的程序上定义对应的动作服务端。放一张节点图,可以看到确实有四个动作节点。














 1302
1302











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









