







多个RGB相机或深度相机之间的对齐,就是不同坐标系的相互转换;
对齐的作用就是把多个坐标系用一个坐标系去描述,一次对齐能减轻后续代码的计算量。
例如:我最近遇到一个:
RGB相机的图像坐标为(u,v),以相机为原点的相机坐标系下该图像点对应坐标为(x,y,z)
其对应齐次公式为下图,其中K、R、T分别表示内参矩阵,旋转矩阵,平移矩阵,s=z,表示尺度
 如果是深度相机对齐到RGB相机,那么KRT就是RGB相机的,反之就是深度相机的。
如果是深度相机对齐到RGB相机,那么KRT就是RGB相机的,反之就是深度相机的。
这样,如果只是图像坐标系转换到相机坐标系的情况下,RT为1
即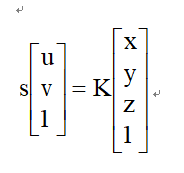 。
。
如果是深度相机对齐到RGB相机,那么以RGB相机为原点构建坐标系。
假设对(x,y,z)做变换H(如旋转,平移等)得到新的(x2,y2,z2),此时反向计算(x2,y2,z2)对应的(u2,v2)
只需要将 即可。
即可。
适用于旋转点云后对原始图像做相应的透视变换的场景。
如果没有对齐的话,还需要考虑深度相机到RGB相机的变换矩阵,会非常麻烦。
需要注意的是,如果涉及平移,可以先计算某个点的平移,再附加到整个图像上
假设平移矩阵为M,那么M*K*H*K_才是平移后的结果。
















 604
604











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











