






 本文详细介绍了如何在Simulink中使用频域方法调整PID控制器参数,通过实例展示了带宽与相位裕度对阶跃响应的影响,并强调了频域设计在控制工程中的重要性。通过实际操作演示,教你如何专业地介绍系统性能指标。
本文详细介绍了如何在Simulink中使用频域方法调整PID控制器参数,通过实例展示了带宽与相位裕度对阶跃响应的影响,并强调了频域设计在控制工程中的重要性。通过实际操作演示,教你如何专业地介绍系统性能指标。
#Simulink中使用频域方法自整定PID控制器参数
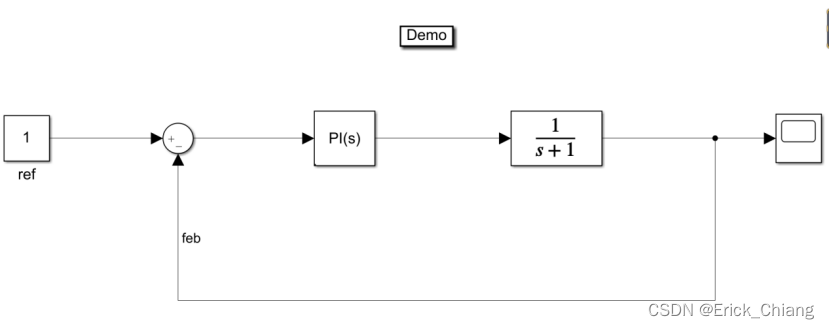
##1.1控制系统demo
现有一个PID控制环路如下所示:
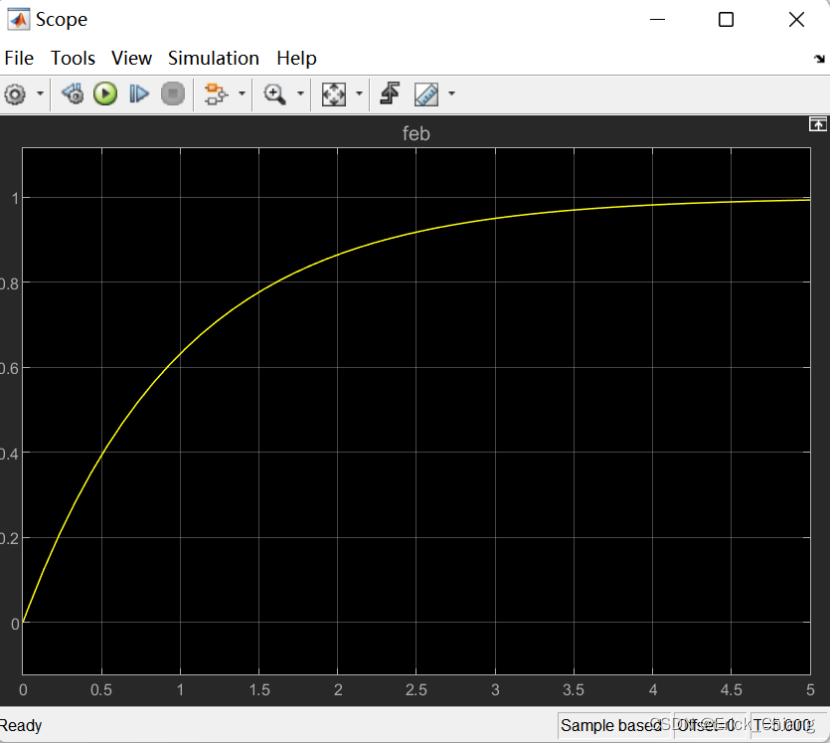
在没有使用频域整定PID参数之前,阶跃响应曲线图如下所示:
##1.2利用PID tunner工具自整定PID参数
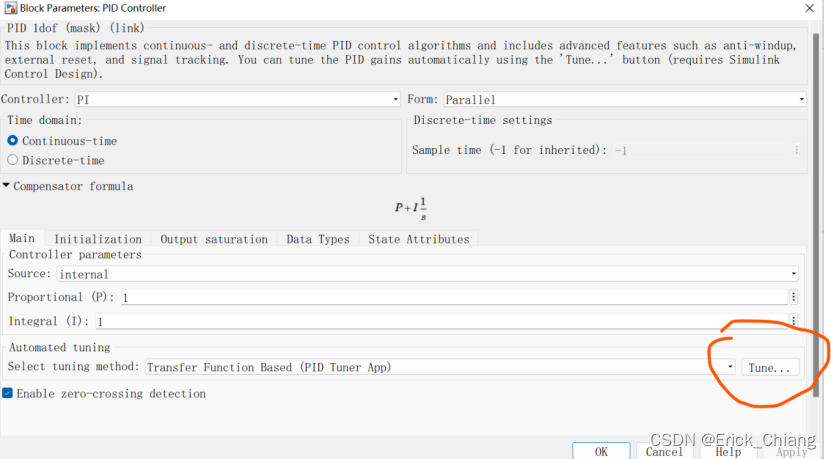
第一步:打开PID tunner
双击 “PID”控制器模块 -> 点击”Tune”。
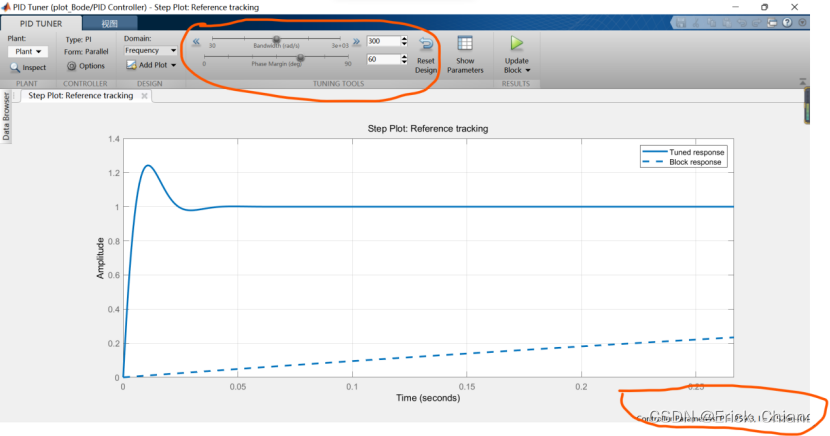
第二步:选择“Frequency”(Time:时域;Frequency:频域)
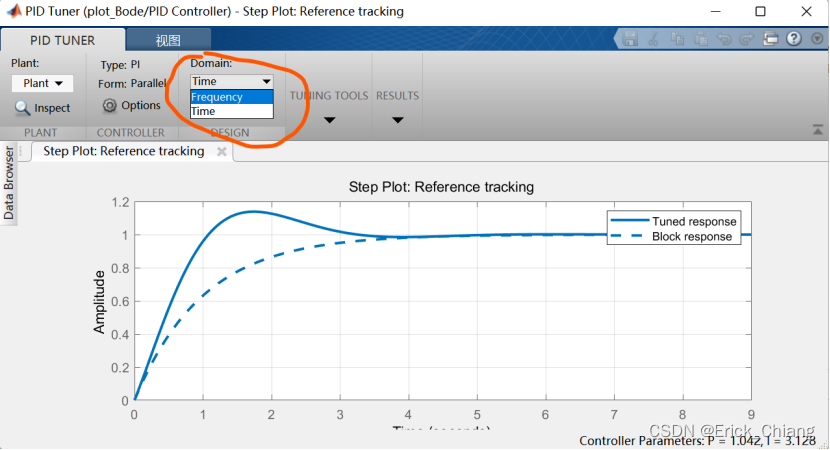
第三步:调节PID控制器带宽与相位裕度 -> 点击“Update Block”即可更新参数
第四步:打开Scope,得到结果。
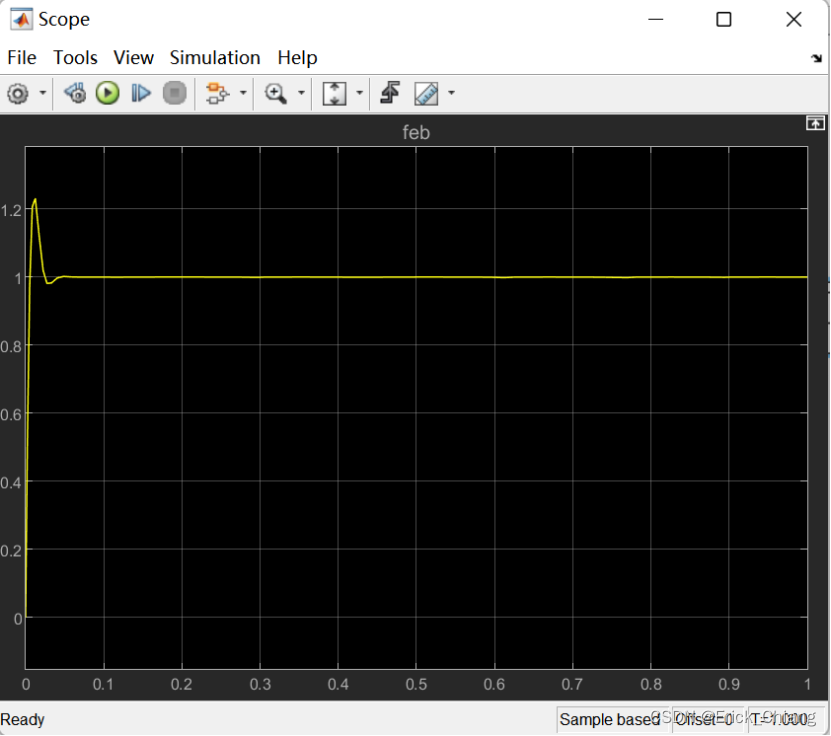
以上,通过增加系统带宽之后,明显发现阶跃时间变小。从之前的5s缩减到0.03s。
在这里,顺便给各位小伙伴讲述一下我所理解的带宽。
带宽即响应速率,以伺服电机控制系统中的速度环为例,速度环的带宽越高,从触感上来感受,你会发现机械的刚性很强,用手是推不动的。刚性起来了,跟随能力(响应速率)也就起来了,阶跃响应速率也就起来了。
##1.3小结
频域思想贯彻控制工程始终。以上,我们通过一个简单频域整定(开环截止频率、相位裕度)的方式整定了PI参数。与盲调PI参数相比,我们的优势在于我们知道了如何衡量你自己的控制系统。即当你向别人介绍你自己的系统时,你可以对别人很自豪的说出你的频域指标,告诉别人你的控制系统带宽,你留的相位裕度。让同行迅速了解你的系统,而不是仅仅告诉别人你的系统参数,这样显得很不专业!!!
以上,谢谢!希望小伙伴们能够多多去掌握频域设计思想,让我们的控制系统真正的实现快、准、稳!!!

















 52
52

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









