







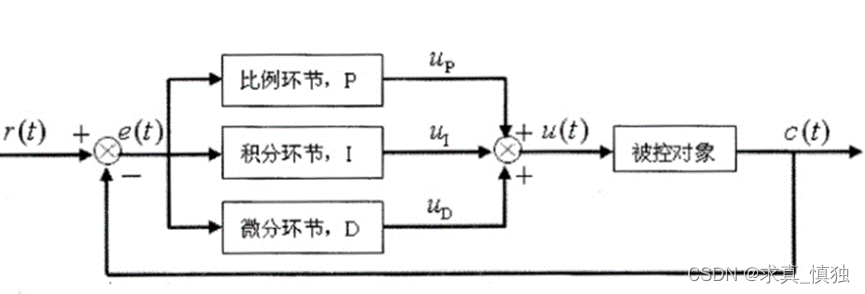
首先PI环和被控对象是串联在一起的,也就是说整体的传递函数是PI调节器的传递函数乘以被控对象的传递函数。
这里以被控对象为一阶惯性环节为例,一阶惯性环节的传递函数如下所示:
(1)
而PI调节器的传递函数为:
(2)
着两者相乘传递函数为
(3)
接下来就是自控里面的知识,分别对这个传递函数求幅值裕度和相位裕度
(4)

(5)
就是穿越频率,这个频率一般在开关频率的1020分之一倍,也就是开关频率是100k的电路,穿越频率在10k到5k之间,当然这是经验值。公式(4)也就是说系统在穿越频率点的增益为1,公式(5)中求得就是传递函数的相位角,方程右边的分子上Margin代表的是相位裕度,这个值一般也在4590之间,而分母就是把角度变成弧度。
对于(4)和(5)的计算再说明一下:(4)求幅值,也就是把实部平方加虚部平方再一起开方,(5)求的是相位角,复数的幅角是 ,把公式(5)中分子的弧度减去分母的弧度,其中对于s这一项由于虚部为0, 为 ,两个未知数两个方程,解出后即可。
以后还会更新其他关于自控的文章,如果这篇文章能帮到你请各位点个小小的关注啦哈哈哈,文中的仿真模型和代码都在我的qq群,有需要的可以去QQ群自取群号为:941483294

















 1476
1476

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









