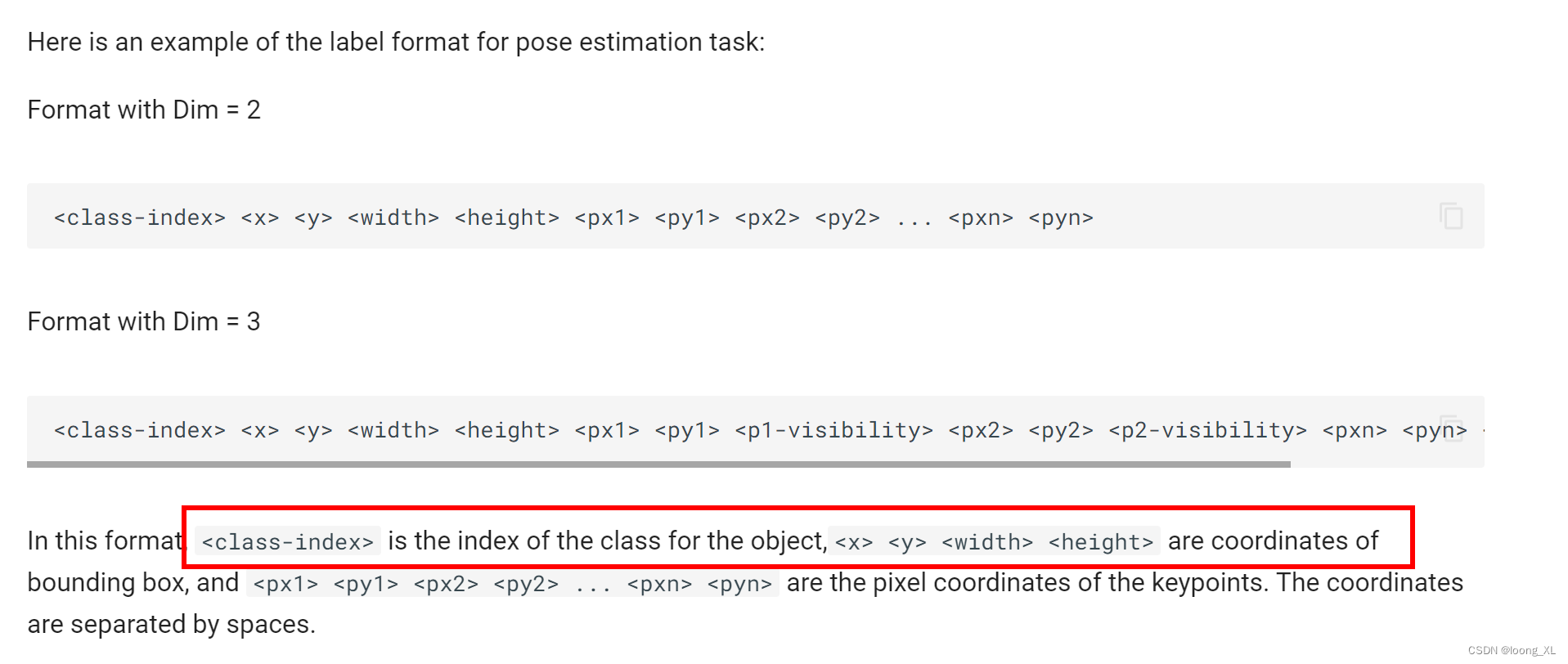
pose自有数据集训练 参考: https://docs.ultralytics.com/datasets/pose/ 数据下载: https://ultralytics.com/assets/tiger-pose.zip yolo标注信息 txt格式 yaml文件: train: train # train images (relative to 'path') 210 images val: val # val images (









 超级会员免费看
超级会员免费看


 订阅专栏 解锁全文
订阅专栏 解锁全文



















 4704
4704

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言


 被折叠的 条评论
为什么被折叠?
到【灌水乐园】发言
被折叠的 条评论
为什么被折叠?
到【灌水乐园】发言








