










目录
一、概述
本文分享Codesys利用G代码控制Delta并联机械手的程序。Codesys有专门的功能块将CNC的插补动作转换至Robotics。具体可以查Codesys的帮助网站。
二、程序架构
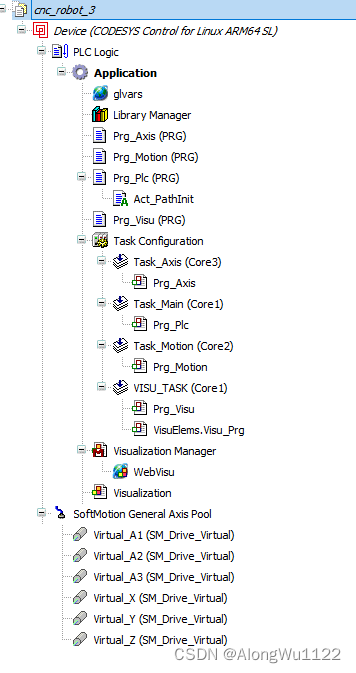
三、关键程序代码
3.1 Prg_Plc
(*
#@Copyright:
#@License:
#@Birth: created by AlongWu on 2023-06-17
#@Content: Prg_Plc-主控制程序
#@Version: 0.0.1
#@Revision: last revised by AlongWu on 2023-06-17
#@brief
*)
PROGRAM Prg_Plc
VAR
arr_visu_3dpath_pointbuffer_bottom :ARRAY[0..glvars.const_udi_size_points_in_array] OF VisuStruct3DPathPoint ; //Visu的3D路径点位底画结构体数组
bw_start :BOOL; //程序启动位
bw_abort :BOOL; //程序终止
bs_running :BOOL; //程序运行中 状态
r_trig_start :R_TRIG; //程序启动上升沿
r_trig_abort :R_TRIG; //程序终止上升沿
arr_ncinterpreter_buf :ARRAY[0..99] OF SMC_GEOINFO; //SMC_NCInterpreter缓存空间
fb_readncfile2 :SMC_ReadNCFile2; //G代码文件读取功能块 实例
fb_pathcopierfile :SMC_PathCopierFile; //G代码文件绑定Path3D控件的底画功能块 实例
fb_ncinterpreter :SMC_NCInterpreter; //G代码文件解析功能块 实例
i_step :INT; //步骤
i_counter :INT; //内部计时器
END_VAR
//程序启动上升沿
r_trig_start(CLK:= NOT(bs_running) AND bw_start, Q=> );
//程序终止上升沿
r_trig_abort(CLK:= bs_running AND bw_abort, Q=> );
//程序启动上升沿触发后
IF r_trig_start.Q THEN
//程序步跳至步骤1
i_step := 1;
END_IF
//自复位
IF bw_start THEN
//复位启动位
bw_start := FALSE;
END_IF
//程序终止o上升沿触发后
IF r_trig_abort.Q THEN
//程序步跳至步骤0
i_step := 0;
//复位运行状态位
bs_running := FALSE;
//功能块实例 复位
fb_readncfile2.bExecute := FALSE;
fb_pathcopierfile.bExecute := FALSE;
END_IF
//自复位
IF bw_abort THEN
//复位启动位
bw_abort := FALSE;
END_IF
//程序步骤
CASE i_step OF
1:
//功能块实例 复位
fb_readncfile2.bExecute := FALSE;
fb_pathcopierfile.bExecute := FALSE;
//步骤+1
i_step := i_step +1 ;
//计时器复位
i_counter := 0;
2:
//计数3个周期
IF i_counter < 3 THEN
i_counter := i_counter + 1 ;
ELSE
i_step := i_step +1 ;
END_IF
3:
//功能块实例置位
fb_readncfile2.bExecute := TRUE;
fb_pathcopierfile.bExecute := TRUE;
bs_running := TRUE;
i_step := i_step +1 ;
ELSE
//无操作
END_CASE
//调用子程序 Act_PathInit
Act_PathInit();
(*
#@Copyright:
#@License:
#@Birth: created by Along on 2023-06-17
#@Content: Act_PathInit-读取G代码的子程序
#@Version: 0.0.1
#@Revision: last revised by Along on 2023-06-17
#@brief
功能块
fb_readncfile2
fb_ncinterpreter
fb_checkvelocities
fb_pathcopierfile
*)
//G代码文件读取功能块
fb_readncfile2(
bExecute:= ,
sFileName:= glvars.str_filepath,
pvl:= ,
fDefaultVel:= 20,
fDefaultAccel:= 20,
fDefaultDecel:= 20,
fDefaultVelFF:= 20,
fDefaultAccelFF:= 20,
fDefaultDecelFF:= 20,
b3DMode:= TRUE ,
bStepSuppress:= ,
aSubProgramDirs:= ,
bParenthesesAsComments:= ,
bDisableJumpBuffer:= ,
bBusy=> ,
bError=> ,
ErrorID=> ,
errorPos=> ,
ErrorProgramName=> ,
sentences=> ,
adwFileSize=> ,
adwPos=> );
//G代码文件解析功能块 实例
fb_ncinterpreter(
sentences:= fb_readncfile2.sentences,
bExecute:= fb_readncfile2.bExecute,
bAbort:= ,
bAppend:= ,
piStartPosition:= ,
vStartToolLength:= ,
nSizeOutQueue:= SIZEOF(arr_ncinterpreter_buf),
pbyBufferOutQueue:= ADR(arr_ncinterpreter_buf),
bEnableSyntaxChecks:= ,
eOriConv:= ,
dCircleTolerance:= ,
pInterpreterStack:= ,
nInterpreterStackSizeBytes:= ,
bDone=> ,
bBusy=> ,
bError=> ,
wErrorID=> ,
errorPos=> ,
poqDataOut=> ,
iStatus=> ,
iLineNumberDecoded=> ,
GCodeText=> ,
CallstackInfo=> ,
aActivePrograms=> );
//G代码动作速度检查功能块 实例
glvars.fb_checkvelocities(
bExecute:= fb_ncinterpreter.bDone,
bAbort:= ,
poqDataIn:= fb_ncinterpreter.poqDataOut,
dAngleTol:= ,
bCheckAddAxVelJump:= ,
dMaxAddAxVelDifference:= ,
bBusy=>,
bError=> ,
wErrorID=> ,
poqDataOut=>);
//G代码文件绑定Path3D控件的底画功能块 实例
fb_pathcopierfile(
bExecute:= ,
udiNumberOfPointsInArray:= glvars.const_udi_size_points_in_array,
pBuffer:= ADR(arr_visu_3dpath_pointbuffer_bottom) ,
sFileName:= glvars.str_filepath,
pvl:= ,
piStartPosition:= ,
aSubProgramDirs:= ,
bParenthesesAsComments:= ,
bEnableSyntaxChecks:= ,
bStepSuppress:= ,
eOriConv:= ,
bDone=> ,
bError=> ,
iErrorID=> ,
vs3dt=> );
3.2 Prg_Motion
(*
#@Copyright:
#@License:
#@Birth: created by AlongWu on 2023-06-17
#@Content: Prg_Motion-运动控制程序
#@Version: 0.0.1
#@Revision: last revised by AlongWu on 2023-06-17
#@brief
*)
PROGRAM Prg_Motion
VAR
END_VAR
//G代码动作速度检查功能块 实例
glvars.fb_interpolator(
bExecute:= ,
//插补器 导入 nc文件的outqueue
poqDataIn:= glvars.fb_checkvelocities.poqDataOut,
bSlow_Stop:= ,
bEmergency_Stop:= ,
bWaitAtNextStop:= ,
dOverride:= 1,
iVelMode:= ,
dwIpoTime:=2000 ,
dLastWayPos:= ,
bAbort:= ,
bSingleStep:= ,
bAcknM:= ,
bQuick_Stop:= ,
dQuickDeceleration:= ,
dJerkMax:= ,
dQuickStopJerk:= ,
bSuppressSystemMFunctions:= ,
bDone=> ,
bBusy=> ,
bError=> ,
wErrorID=> ,
piSetPosition=> ,
iStatus=> ,
bWorking=> ,
iActObjectSourceNo=> ,
dActObjectLength=> ,
dActObjectLengthRemaining=> ,
dVel=> ,
vecActTangent=> ,
iLastSwitch=> ,
dwSwitches=> ,
dWayPos=> ,
wM=> ,
adToolLength=> ,
Act_Object=> );
//Tripod并联机械手的移动控制功能块 实例
glvars.fb_trafo_tripod_Arm(
pi:= glvars.fb_interpolator.piSetPosition,
dArmLength1:= glvars.const_lr_driven_armlen,
dArmLength2:= glvars.const_lr_passive_armlen,
dArm1Radius:= glvars.const_lr_driven_arm_r,
dStewartRadius:= glvars.const_lr_endplate_r,
dDistance:= glvars.const_lr_platejoin_dist,
dRotationOffset:= 0,
dOffsetA:= 0,
dOffsetB:= 0,
dOffsetC:= 0,
dMaxAngleBallJoint:= 60,
bError=> ,
dA=> ,
dB=> ,
dC=> );
//绗架三维空间移动控制功能块 实例
glvars.fb_trafo_gantry3d(
pi:= glvars.fb_interpolator.piSetPosition,
dOffsetX:= ,
dOffsetY:= ,
dOffsetZ:= ,
dx=> ,
dy=> ,
dz=> );
3.3 Prg_Visu
(*
#@Copyright:
#@License:
#@Birth: created by AlongWu on 2023-06-17
#@Content: Prg_Visu-可视化控制程序
#@Version: 0.0.1
#@Revision: last revised by AlongWu on 2023-06-17
#@brief
*)
PROGRAM Prg_Visu
VAR
fb_positiontracker :SMC_PositionTracker; //Visu的Path3D控件绑定路径跟踪功能块 实例
fb_trafof_tripod_Arm :SMC_TRAFOF_Tripod_Arm; //Tripod并联机械手Visu的绑定功能块 实例
fb_trafof_gantry3d :SMC_TRAFOF_Gantry3D; //绗架三维空间移Visu的绑定功能块 实例
arr_visu_3dpath_pointbuffer_track :ARRAY[0..glvars.const_udi_size_points_in_array] OF VisuStruct3DPathPoint ; //Visu的3D路径点位跟踪画结构体数组
v3d_target :SMC_VECTOR3D; //末端三维坐标
END_VAR
//Visu的Path3D控件绑定路径跟踪功能块
fb_positiontracker(
bEnable:= glvars.fb_interpolator.bBusy,
bClear:= ,
dX:= Virtual_X.diActPosition,
dY:= Virtual_Y.diActPosition,
dZ:= Virtual_Z.diActPosition,
udiNumberOfPointsInArray:= glvars.const_udi_size_points_in_array,
pBuffer:= ADR(arr_visu_3dpath_pointbuffer_track),
vs3dt=> );
//绗架三维空间移动控制功能块 实例
fb_trafof_tripod_Arm(
dArmLength1:= glvars.const_lr_driven_armlen,
dArmLength2:= glvars.const_lr_passive_armlen,
dArm1Radius:= glvars.const_lr_driven_arm_r,
dStewartRadius:= glvars.const_lr_endplate_r,
dDistance:= glvars.const_lr_platejoin_dist,
dRotationOffset:= 0,
dOffsetA:= 0,
dOffsetB:= 0,
dOffsetC:= 0,
dx=> v3d_target.dX,
dy=> v3d_target.dY,
dz=> v3d_target.dZ,
DriveA:= Virtual_A1,
DriveB:= Virtual_A2,
DriveC:= Virtual_A3);
//绗架三维空间移Visu的绑定功能块 实例
fb_trafof_gantry3d(
dOffsetX:= ,
dOffsetY:= ,
dOffsetZ:= ,
minX:= ,
maxX:= 200,
minY:= ,
maxY:= 200,
minZ:= ,
maxZ:= 200,
DriveX:= Virtual_X,
DriveY:= Virtual_Y,
DriveZ:=Virtual_Z ,
dx=> ,
dy=> ,
dz=> ,
dnx=> ,
dny=> ,
dnz=> ,
dm=> );以上。















 870
870











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









