







1 不确定系统描述[1][2]
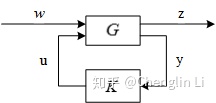
 1 不确定系统描述[1][2] 是适当维数矩阵,没有选择的标准,需要根据实际情况,大量试验选取。 为增广控制对象; 是控制器; 是控制输入; 是被测量输出或对象输出( u和y分别是系统传递函数或者状态空间里的输入和输出); 是外部输入或参考输入,如:扰动、噪声; 是被控制的输出,是系统评价信号;2 Schur补性质给定的对称矩阵 是 维德,以下三个条件是等价的:(1) 负定(2...
1 不确定系统描述[1][2] 是适当维数矩阵,没有选择的标准,需要根据实际情况,大量试验选取。 为增广控制对象; 是控制器; 是控制输入; 是被测量输出或对象输出( u和y分别是系统传递函数或者状态空间里的输入和输出); 是外部输入或参考输入,如:扰动、噪声; 是被控制的输出,是系统评价信号;2 Schur补性质给定的对称矩阵 是 维德,以下三个条件是等价的:(1) 负定(2...
 2万+
2万+











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言




 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章





















