







在学习TEB算法的过程中,作者提供了一个插件用于转换代价地图,原始的代价地图是由栅格地图中单元格组成,用于表示障碍物,但单元格占用的计算资源较大,故采用插件将单元格转换成点,线,多边形表示。
插件激活
rospack plugins --attrib=plugin costmap_converter
配置cfg文件
在导航配置文件下,新建costmap_converter_params.yaml
###########################################################################################
## NOTE: Costmap conversion is experimental. Its purpose is to combine many point ##
## obstales into clusters, computed in a separate thread in order to improve the overall ##
## efficiency of local planning. However, the implemented conversion algorithms are in a ##
## very early stage of development. Contributions are welcome! ##
###########################################################################################
TebLocalPlannerROS:
## Costmap converter plugin
# costmap_converter_plugin: "costmap_converter::CostmapToPolygonsDBSMCCH"
costmap_converter_plugin: "costmap_converter::CostmapToLinesDBSRANSAC"
#costmap_converter_plugin: "costmap_converter::CostmapToLinesDBSMCCH"
#costmap_converter_plugin: "costmap_converter::CostmapToPolygonsDBSConcaveHull"
costmap_converter_spin_thread: True
costmap_converter_rate: 5
## Configure plugins (namespace move_base/costmap_to_lines or move_base/costmap_to_polygons)
## costmap_converter/CostmapToLinesDBSRANSAC, costmap_converter/CostmapToLinesDBSMCCH, costmap_converter/CostmapToPolygonsDBSMCCH
costmap_converter/CostmapToLinesDBSRANSAC:
cluster_max_distance: 0.4
cluster_min_pts: 2
ransac_inlier_distance: 0.15
ransac_min_inliers: 10
ransac_no_iterations: 1500
ransac_remainig_outliers: 3
ransac_convert_outlier_pts: True
ransac_filter_remaining_outlier_pts: False
convex_hull_min_pt_separation: 0.1
在启动文件中,增加costmap_converter启动项
<!-- Here we load our costmap conversion settings -->
<rosparam file="$(find teb_local_planner_tutorials)/cfg/diff_drive/costmap_converter_params.yaml" command="load" />
未调用costmap_converter插件
由方格表示障碍物位置

修改costmap_converter
通过修改插件调用不同的转换算法
1 调用CostmapToPolygonsDBSMCCH
将其余三个注释,只调用polygon算法
显而易见,用多边形表征障碍物

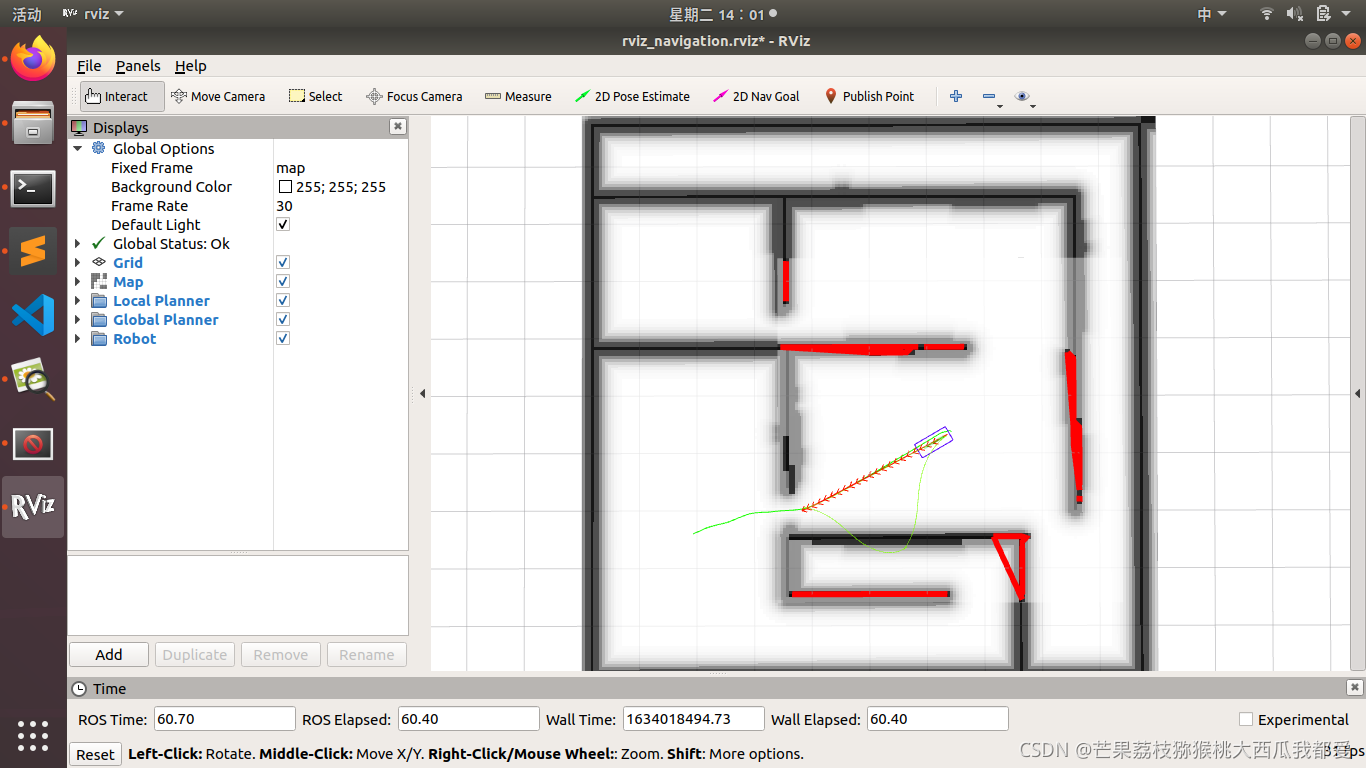
2 调用CostmapToLinesDBSRANSAC
用单线段表示

3. 调用CostmapToLinesDBSMCCH
用单线段与栅格组合表示?
这个没搞懂

4. 调用CostmapToPolygonsDBSConcaveHull
这个与第一个的区别?
后续了解原理再补充














 2774
2774











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









