







 超级会员免费看
超级会员免费看
介绍
DETA100系列 是一个提供 GNSS/INS & AHRS 系统的模组,在最苛刻的条件下提供准确的位置、速度、加速度和姿态数据。它结合了温度校准的加速度计,陀螺仪,磁力计与一个双天线RTK、GNSS接收器。这些是耦合在一个复杂的融合算法,以提供准确和可靠的导航和方向。同时DETA100系列 支持辅助设备的数据接入,如里程计、光流计、RTCM 数据等。
FDILink通讯协议
数据帧组成
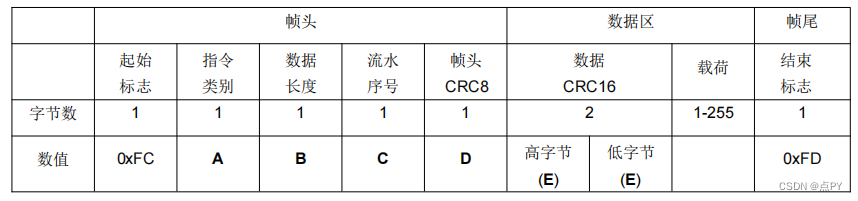
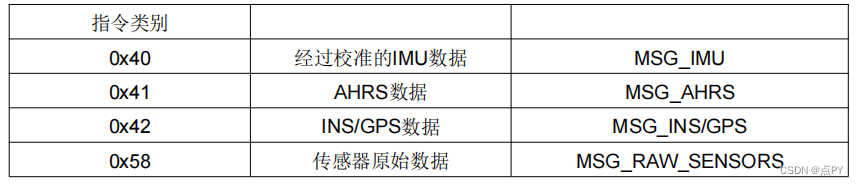
A: 指令类别
B:载荷的字节数。
C:流水号, 每发送一个数据帧数值加一,用于检测数据帧丢包。
D:帧头CRC8校验,计算帧头部分 起始标志 + 指令类别 + 数据长度 + 流水序号。
E:数据CRC16校验,计算载荷数据的CRC16校验。
数据包
以双天线为例

 订阅专栏 解锁全文
订阅专栏 解锁全文



















 3072
3072

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











