







智能驾驶雷达的布局设计是为了提供全面的环境感知能力,支持高级驾驶辅助系统(ADAS)和自动驾驶功能。不同类型的雷达(如毫米波雷达、激光雷达、超声波雷达等)各自发挥不同的作用,结合摄像头和其他传感器,构成一个完整的感知系统。下面是智能驾驶雷达布局的详细解析。
1. 雷达布局类型及位置
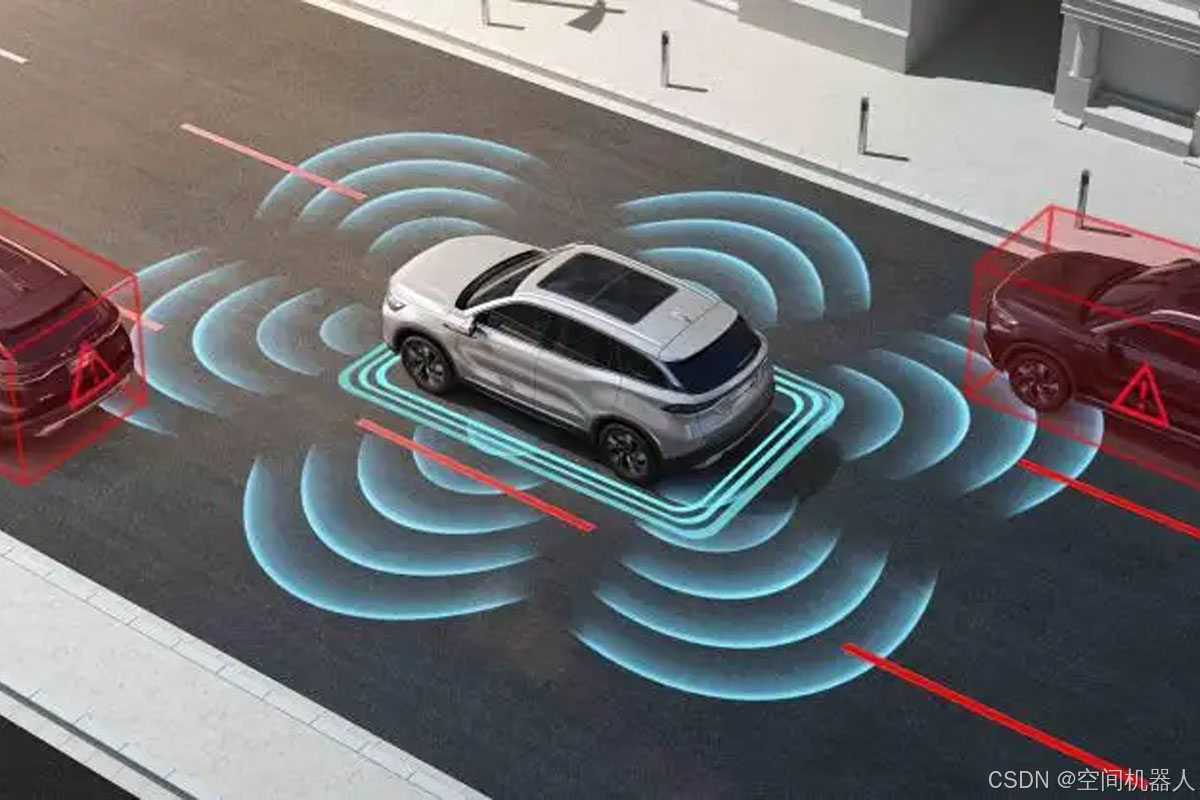
- 前向雷达:通常位于车辆前保险杠或格栅内,用于检测前方车辆、行人、障碍物和路况。前向雷达通常是长距离毫米波雷达(如77 GHz),其检测距离可达到200米以上,主要用于自适应巡航控制(ACC)、前碰撞预警(FCW)等功能。
- 侧向雷达:安装在车辆的前后轮拱、侧裙或后视镜内,用于检测车辆两侧的障碍物或来车,支持盲点检测(BSD)、变道辅助(LCA)和自动泊车等功能。侧向雷达多为中距离毫米波雷达,检测范围一般为70-100米。
- 后向雷达:通常安装在车辆后保险杠内,检测后方车辆、行人和障碍物,用于倒车辅助、后碰撞预警(RCW)和交通穿行警示(RCTA)等功能。后向雷达与侧向雷达类似,通常为中距离毫米波雷达。
- 激光雷达(LiDAR):常被放置在车顶、前保险杠或前挡风玻璃上方,用于高
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章



















 804
804

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











