









Ultralytics YOLO11:计算机视觉的全新突破与无人驾驶应用
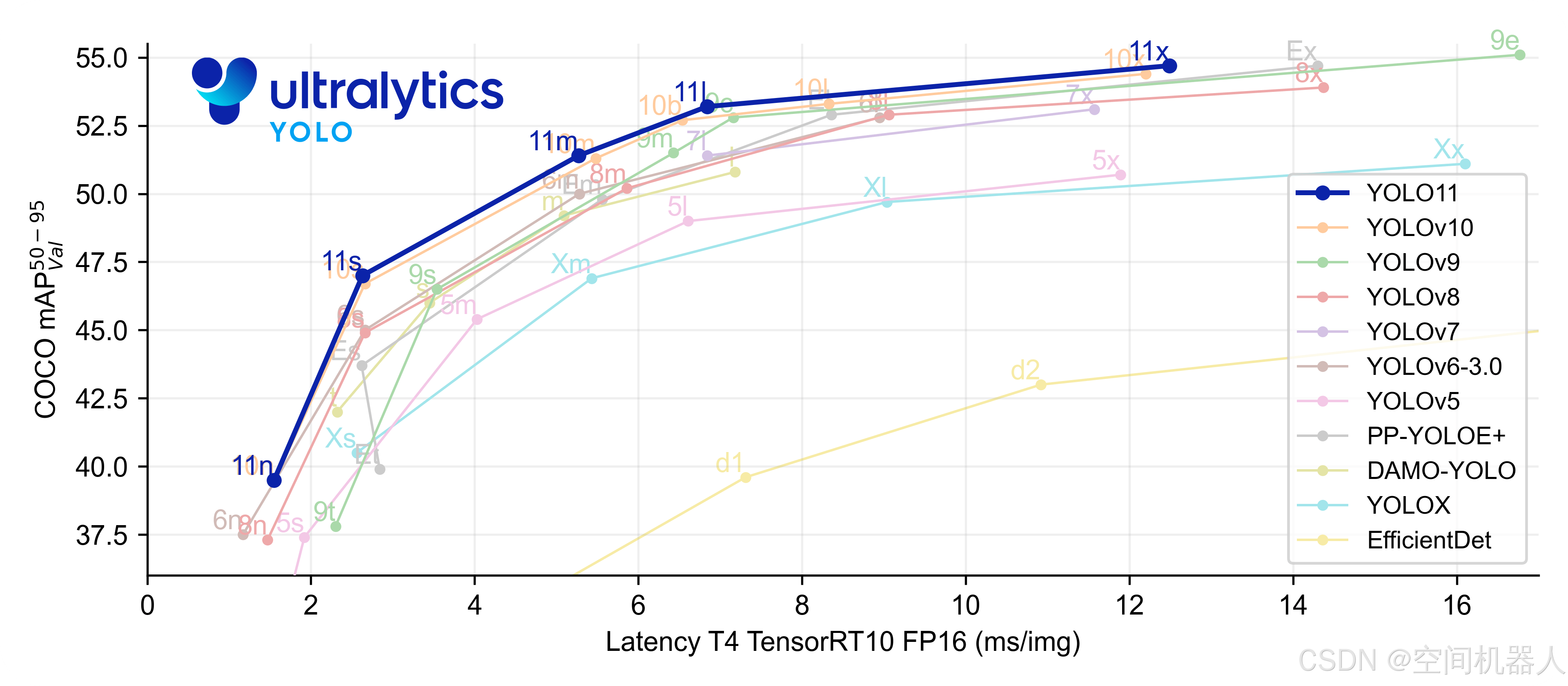
在计算机视觉领域,YOLO(You Only Look Once)系列一直以其卓越的实时目标检测性能而闻名。如今,Ultralytics 推出了最新版本——YOLO11,再次将目标检测的精度、速度和效率提升到了新的高度。
支持的任务和模型变体
YOLO11 提供了多种模型变体,以适应不同的计算资源和应用需求:
| 模型 | 文件名 | 任务 | 推理 | 验证 | 训练 | 导出 |
|---|---|---|---|---|---|---|
| YOLO11 | yolo11n.pt, yolo11s.pt, yolo11m.pt, yolo11l.pt, yolo11x.pt | 检测 | ✅ | ✅ | ✅ | ✅ |
| YOLO11-seg | yolo11n-seg.pt, yolo11s-seg.pt, yolo11m-seg.pt, yolo11l-seg.pt, yolo11x-se |

 订阅专栏 解锁全文
订阅专栏 解锁全文


















 2732
2732

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











