







一、定义
三维空间采用右手坐标系,大拇指为X轴,食指为Y轴,中指为Z轴。绕某一个轴转动,采用右手握拳确定方向。以绕Z轴为例,右手握拳大拇指向Z轴方向,则手指握拳的方向为逆时针方向,旋转的角度为正。
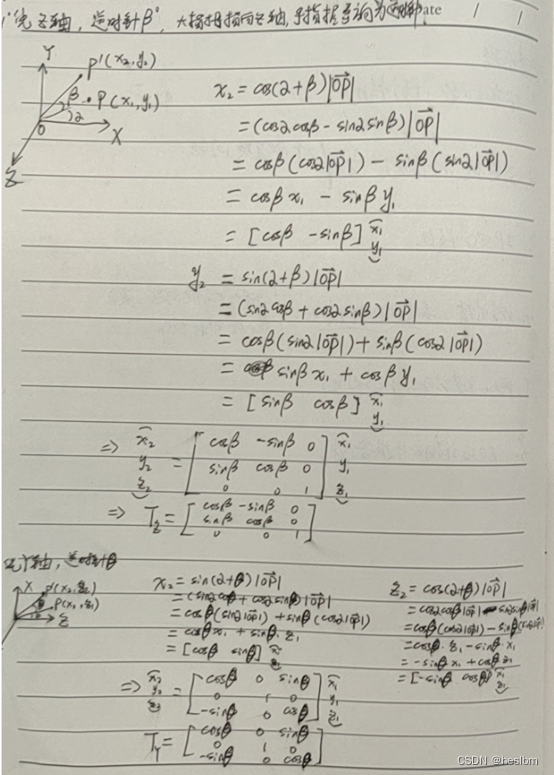
二、向量在三维空间的旋转
如下图所示,绕Z轴转动β,则旋转矩阵为Tz,绕Y轴旋转θ,旋转矩阵为Ty,绕Z轴旋转φ,旋转矩阵为Tx。证明过程如下图所示,采用极坐标思路来证明。
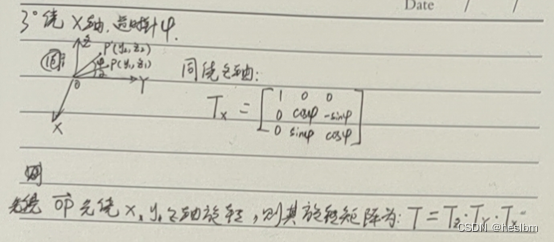
向量分别绕X Y Z轴逆时针旋转,最终的旋转矩阵为T = TzTyTx。
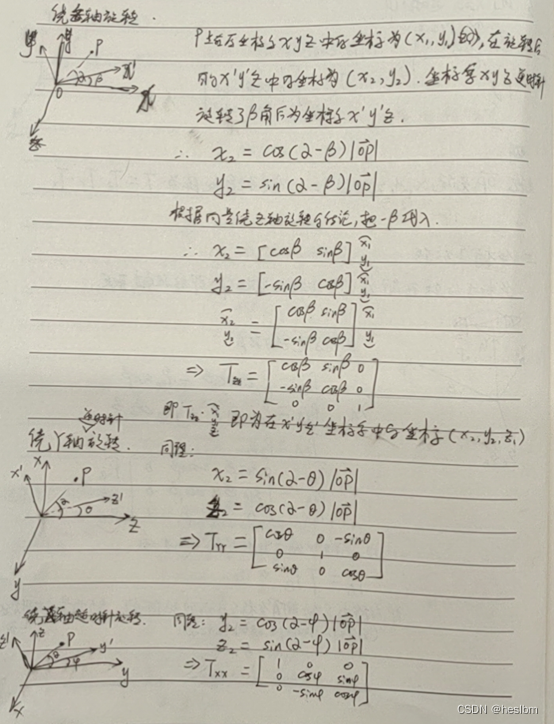
三、坐标系转换
对于坐标系旋转,相对向量来说,类似于向量旋转的逆操作。向量操作是坐标系不动,向量旋转了一个α角度,现在向量不变,坐标系变换,在二维平面很容易理解,为了达到向量旋转的效果,可以让坐标系旋转-α角,向量在新的坐标系下的坐标和向量在原坐标系下旋转α的新坐标是一致的,证明过程如下图所示,采用和向量一样的极坐标方法,也很容易看出坐标系旋转是向量旋转的逆操作。

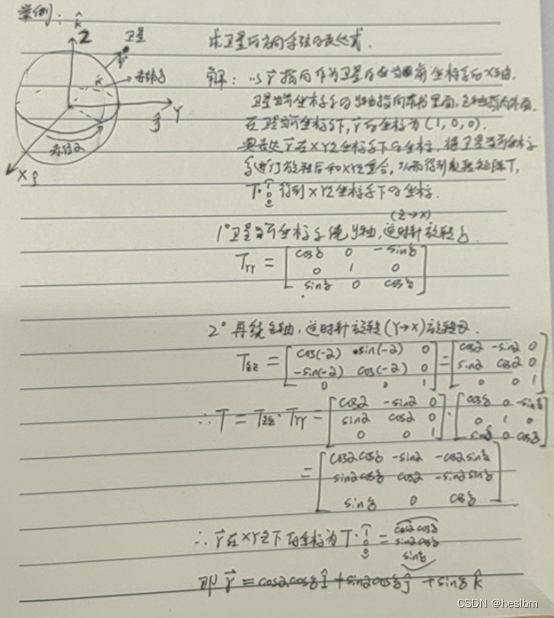
四、举例
以卫星的轨迹为例,来进行坐标系变换的示例。

















 2万+
2万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









