







最近学习了无人机的一些知识,在关于遥控系统这部分的各种协议看的有些头大,人都晕了。看了一些资料后终于大概理解了这套系统中那些一团乱麻般的各协议的意义,大致总结一下。
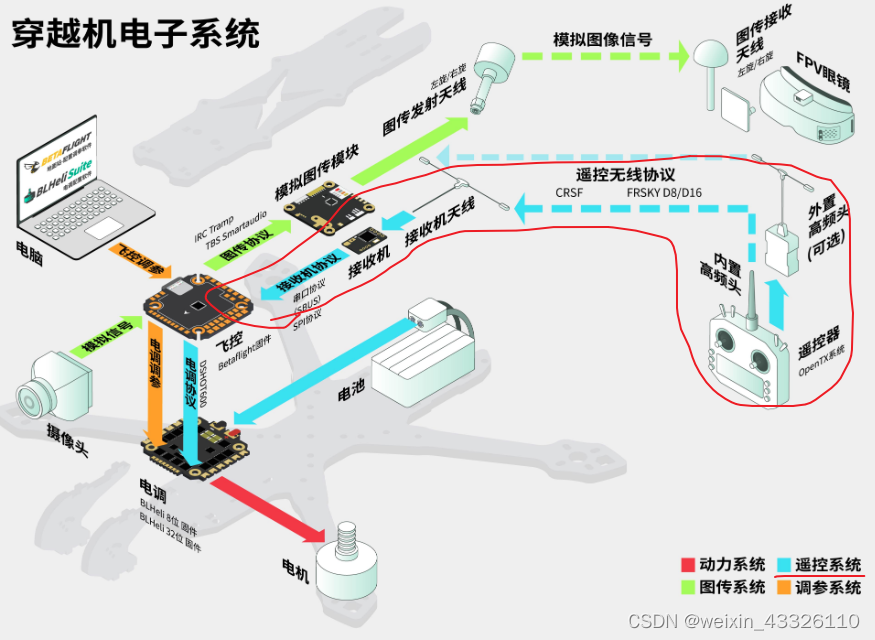
这里参考FPV帮装机百科的图简单说一下遥控系统的组成,主要包括四部分:飞控,接收机,高频头,遥控器。而对于大多数玩家来说,遥控器与高频头更多情况下是一个封装好的整体,无需操作也没有太多操作空间,即使是选用外置高频头,也仅仅是调整一下在遥控器的操作系统内的设置即可。因此我们见到的大部分协议都是位于下面三个部分之间:
- 飞控
- 接收机
- 高频头
一、飞控&接收机间的协议
飞控与接收机间的协议常见的包括:
- PWM
- PPM(Pulse Position Modulation,也叫CPPM)
- SBUS(Serial Bus,也叫S.BUS,S-BUS)
- DSM2(Digital Spread Spectrum Modulation,同一协议不同代:DSM,DSMDX)
- CRSF
这类协议协议可以在各类飞控的说明书见到例如我最近看的乐迪的mini PIX飞控:
例如在乐迪PIX mini的说明书中,关于遥控系统(RC)的说明就会见到这些协议的支持。此外这一类协议由于涉及到飞控和接收机的硬件连接,在接线上也存在一定的差别,参考某品牌飞控的接线示意图:
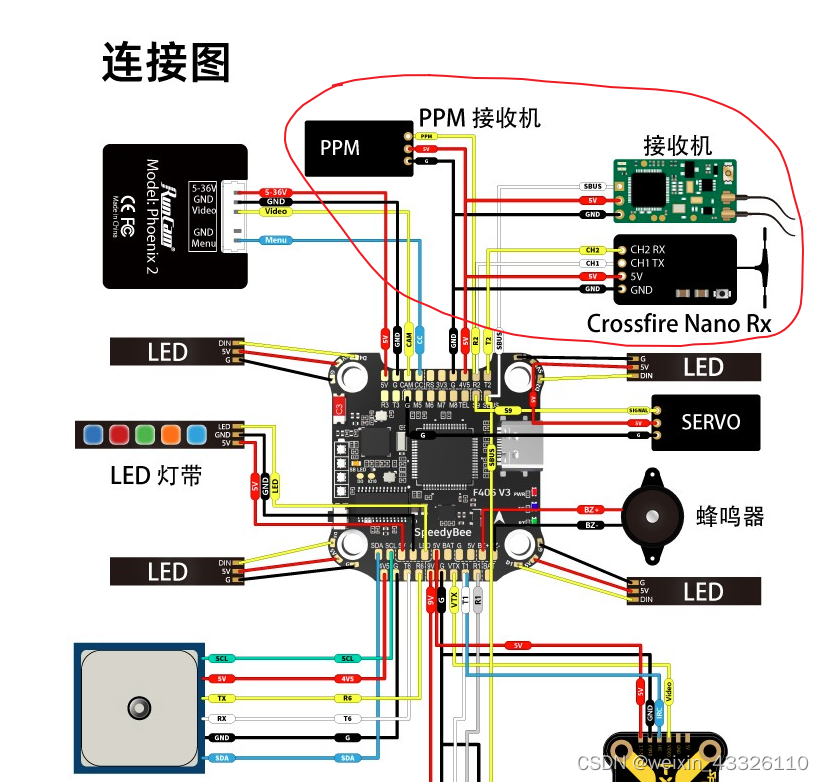
可以看到,对于不同协议的接收机,接线方式也存在一定差别,例如PPM和SBUS的接收机是三线的,CRFS是四线的,这点在选用接收机的时候要格外注意,自己的飞控是否支持这一协议。
下面有以下从原理上详解这类协议的文章,如需更深入学习可供参考:
二、接收机&遥控器间的协议
而接收机与遥控器之间的协议,由于差别主要体现在软件(可能),因此各个厂家几乎都有自己的协议(而且往往直接用厂家名字命名),所以出现的非常多且杂的协议。但无所谓,大部分厂家的配对都大同小异,我们无需关心这这些协议的底层差异,只要能用即可。简单列举一些常见的接收机&遥控器间的协议:
- Frsky D8/D16
- Futaba S-FHSS
- RadioLink
有一个比较全的总结各厂家协议的文章贴在这里:

















 8176
8176

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









