







1 概述

1.1 什么是全局光照(GI)?
全局光照 = 直接光照 + 间接光照,GI非常重要,但是很复杂,但如果只有考虑直接光照,很多地方都是黑的,减少了渲染的真实感。
1.2 光照模型处理间接光照的方法
Bling-Phone模型处理间接光照的方法:假设接收各个点的间接光照都是相同的,分解为环境光项。
1.3 实时全局光照的思想
实时渲染中,通常只考虑一次间接光照,把一切被直接光照照亮的物体称为次级光源。
2 GI的主要问题
需要知道什么来计算着色点p的间接光照?
主要有两项:
- 哪些surface patches能被直接照亮?
- 每一个surface path对着色点p的贡献是多少?
3 方法一:Reflective Shadow Maps(RSM)
在游戏中常常用来做手电筒(flashlights)的效果。
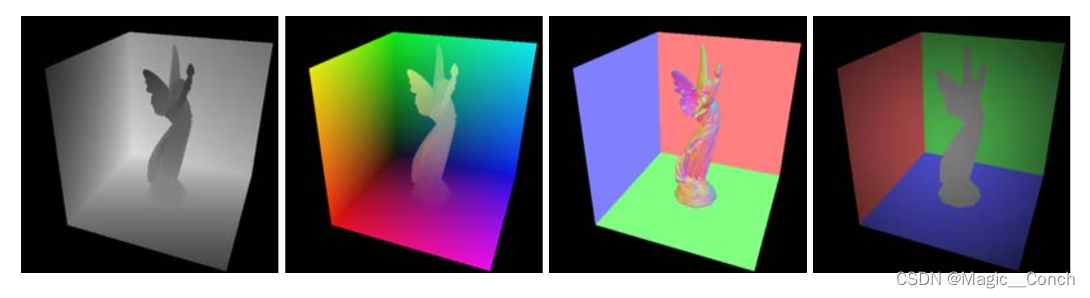
3.1 使用shadow map来寻找能被直接照亮的点
思想:将每一个shadow map上的像素当成次级光源。
问题:需要知道每个像素位置每个出射方向的radiance,但实际上只能知道到相机的方向。
假设:所有的反射物都是diffuse的(不要求点p是diffuse的),因此点p的所有出射方向是相同的。
3.2 对直接照亮的patch进行积分计算着色点p的contribution

L
o
(
p
,
ω
o
)
=
∫
Ω
p
a
t
c
h
L
i
(
p
,
ω
i
)
V
(
p
,
ω
i
)
f
r
(
p
,
ω
i
,
ω
o
)
cos
θ
i
d
ω
i
=
∫
A
p
a
t
c
h
L
i
(
q
→
p
)
V
(
p
,
ω
i
)
f
r
(
p
,
q
→
p
,
ω
o
)
cos
θ
p
cos
θ
q
∥
q
−
p
∥
2
d
A
\begin{aligned} L_o\left(\mathrm{p}, \omega_o\right) &=\int_{\Omega_{\mathrm{patch}}} L_i\left(\mathrm{p}, \omega_i\right) V\left(\mathrm{p}, \omega_i\right) f_r\left(\mathrm{p}, \omega_i, \omega_o\right) \cos \theta_i \mathrm{~d} \omega_i \\ &=\int_{A_{\mathrm{patch}}} L_i(\mathrm{q} \rightarrow \mathrm{p}) V\left(\mathrm{p}, \omega_i\right) f_r\left(\mathrm{p}, \mathrm{q} \rightarrow \mathrm{p}, \omega_o\right) \frac{\cos \theta_p \cos \theta_q}{\|q-p\|^2} \mathrm{~d} A \end{aligned}
Lo(p,ωo)=∫ΩpatchLi(p,ωi)V(p,ωi)fr(p,ωi,ωo)cosθi dωi=∫ApatchLi(q→p)V(p,ωi)fr(p,q→p,ωo)∥q−p∥2cosθpcosθq dA
由于假设平面是漫反射的,所以上式中,
- f r = ρ π f_r=\frac{\rho}{\pi} fr=πρ
- L i = f r ⋅ Φ d A L_i=f_r·\frac{\Phi}{dA} Li=fr⋅dAΦ
- 因此上式可以写为 E p ( x , n ) = Φ p max { 0 , ⟨ n p ∣ x − x p ⟩ } max { 0 , ⟨ n ∣ x p − x ⟩ } ∥ x − x p ∥ 4 E_p(x, n)=\Phi_p \frac{\max \left\{0,\left\langle n_p \mid x-x_p\right\rangle\right\} \max \left\{0,\left\langle n \mid x_p-x\right\rangle\right\}}{\left\|x-x_p\right\|^{4}} Ep(x,n)=Φp∥x−xp∥4max{0,⟨np∣x−xp⟩}max{0,⟨n∣xp−x⟩}
3.3 RSM的问题:处理每个像素的Visibility 、Orientation、Distance

- Visibility很难获取,因此干脆就不做处理。
- Orientation、Distance等占用空间比较大,因此要想办法减少存储量。
3.3.1 Acceleration 加速方法
- 理论上,所有shadow map中的像素都对p有贡献,但是只要取离得比较近的次级光源就可以了。
- 或者使用某种采样算法来减少采样点。
那么如何知道哪些光源比较近?

假设shadow map上离得比较近的点在世界坐标上也比较近。
3.3.2 RSM中需要存储:Depth、world coordinates、normal、flux。
3.4 RSM的优点和缺点
优点:容易实现(Shadow Map)。
缺点:
- 有多少直接光源就做多少shadow map。
- 不能计算反射物到shading point的visibility。
- 做了很多大胆的假设:diffuse reflectors, depth as distance.
- 需要在采样率和质量之间进行trade off.















 1643
1643











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









