






问题描述:相机坐标系如何转换到世界坐标系。
问题解答:
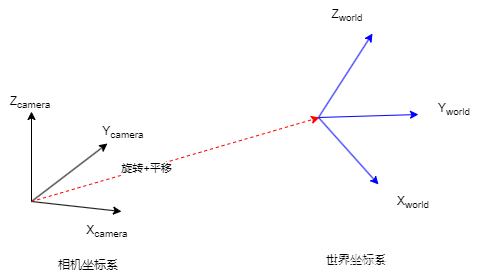
相机坐标系的定义:相机坐标系是以相机为基准建立的坐标系。它通常将相机的光学中心作为原点,相机的光轴为Z轴,X轴和Y轴与图像平面平行,与光轴垂直,形成一个右手坐标系。
世界坐标系的定义:世界坐标系通常是以某个固定的参考点、参考物体或参考方向为基准建立的。这个参考点可以是任何合适的选择,具体取决于应用的领域和需求。例如,在机器人学中,世界坐标系的原点可以选择为机器人基座的中心,或者是机器人末端执行器的中心。在地理信息系统中,世界坐标系的原点通常选择为地球的某个地理位置,例如经纬度为 (0, 0) 的点。
我理解的相机坐标系转换到世界坐标系的过程就是手眼标定过程,手指的是机械臂,眼指的是相机。
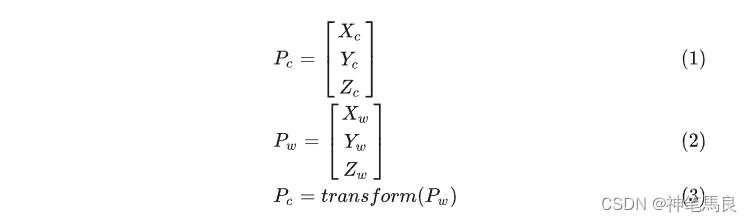
假设物体在相机坐标系中的坐标为,物体在世界坐标系中的坐标为
。则从相机坐标系转换到世界坐标系的转换函数即为transform()
由本科学习到的线性代数知识,一个物体坐标左乘一个矩阵的几何意义是,这个物体进行旋转。物体坐标加上一个向量,即为平移。
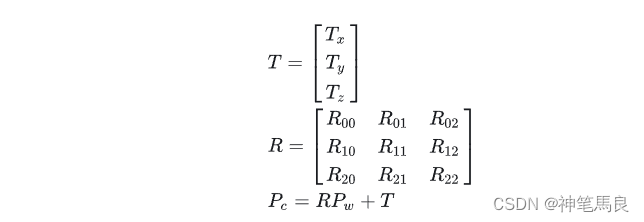
假设平移向量是T,旋转矩阵是R,因此转换函数即为transform()即为
线性代数中常把非齐次坐标转换为齐次坐标,因此,上述转换函数可以改成
上面的这个矩阵就是众所周知的外参矩阵。

















 2980
2980











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











