






一、M2DGR_Plus数据集
M2DGR_Plus传感器包含一个Robosense 16线Lidar,一个GNSS,一个视觉惯性传感器(V-I Sensor)、一个九轴惯性测量单元(IMU)、一个GNSS-IMU导航系统,一个动作捕捉系统(Motion-capture System)。
二、Tree
rosbag play tree3.bag
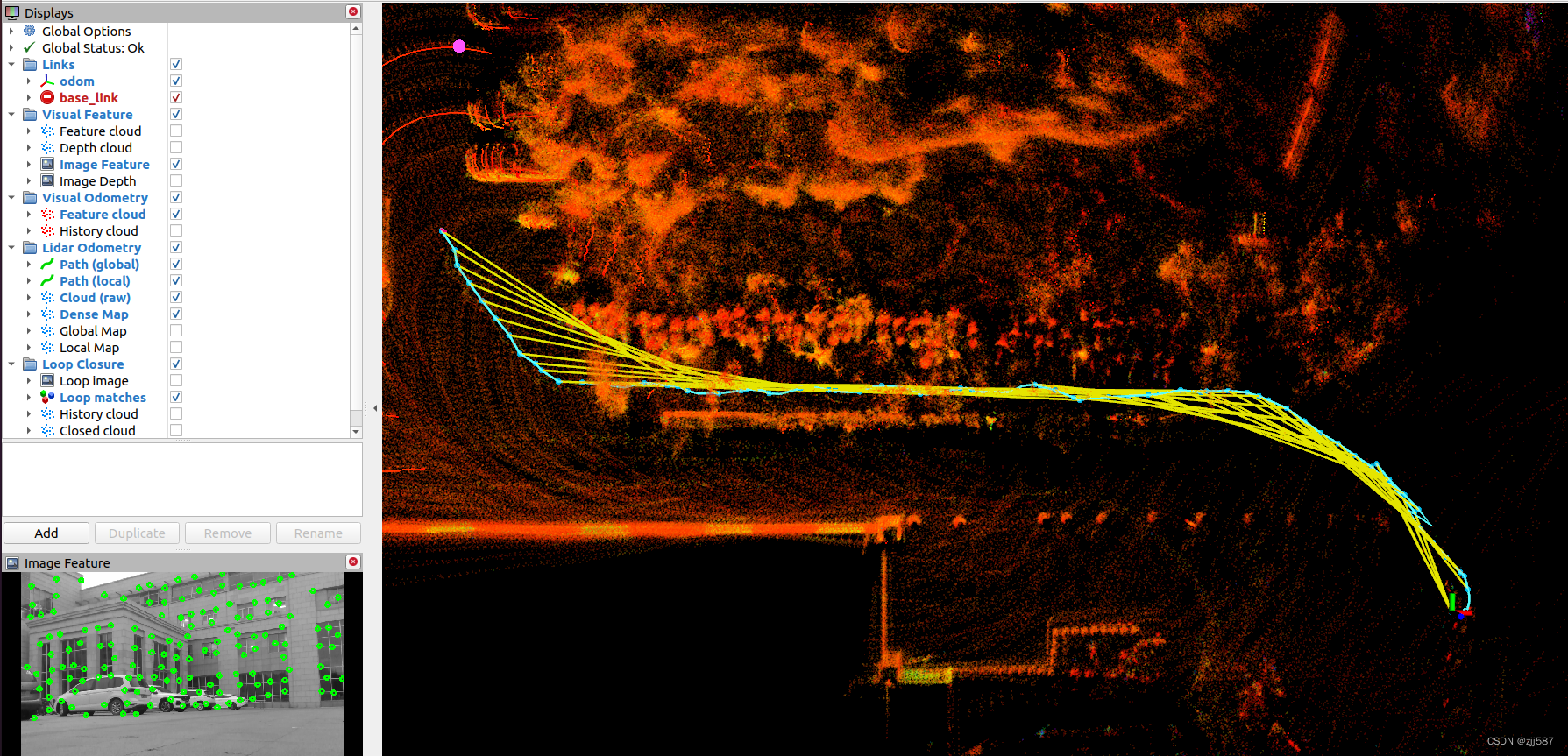
直接运行rviz中base_link出现报错,终端警告:没有足够的特征点。
[ WARN] [1712486573.340989979]: Not enough features! Only 1 edge and 1 planar features available.
[ WARN] [1712487618.795513174]: Large bias, reset IMU-preintegration!
查看话题发现,bag中存在 /tf 话题发布,过滤掉该话题创建新的bag。
rosbag filter tree3.bag tree3_no_tf.bag "topic != '/tf'"
再次run
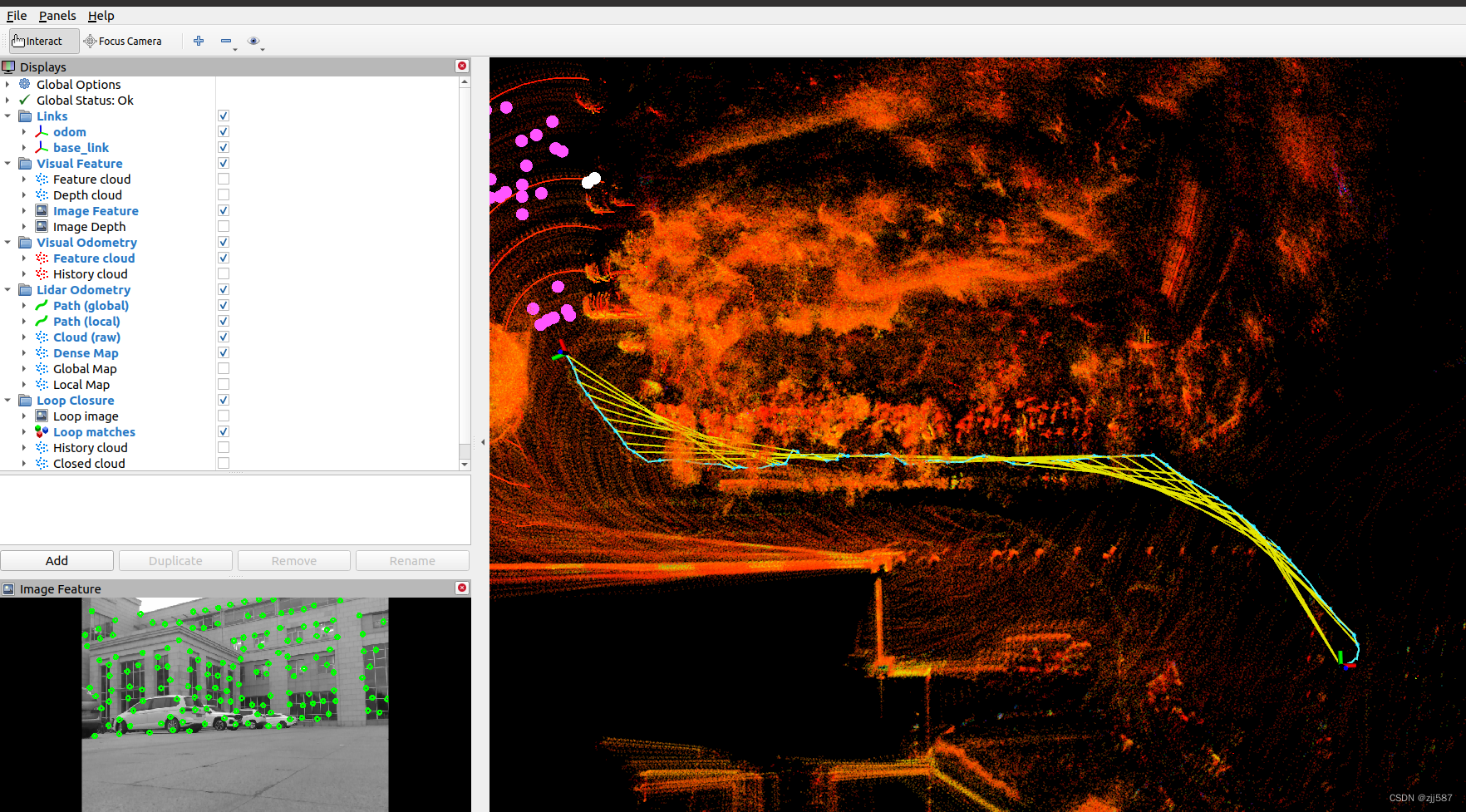
base_link解决,但仍然存在上相同警告。运行成功,但图像存在漂移。
evo评估
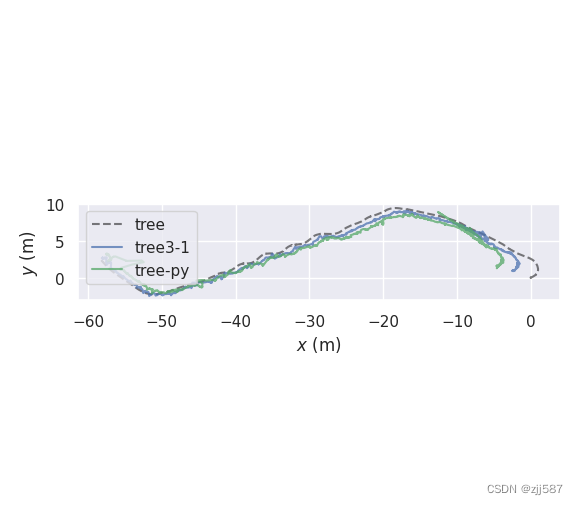
tree:真值 tree3-1:配置文件偏移量设置为0 tree-py:设置偏移量。效果较好。
三、Anomaly
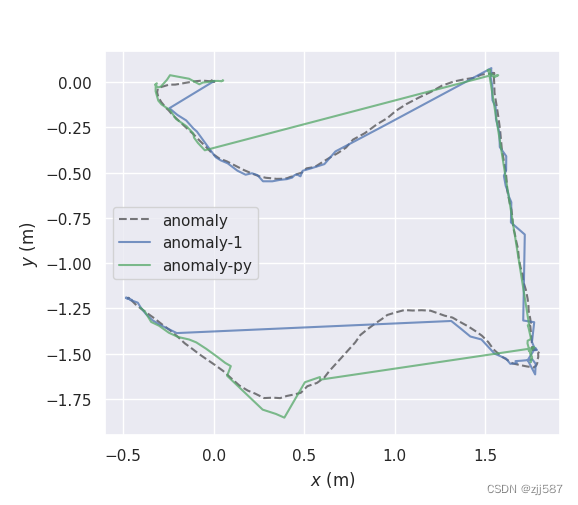
-py:设置偏移量,-1:配置文件偏移量设置为0 。
四、Switch
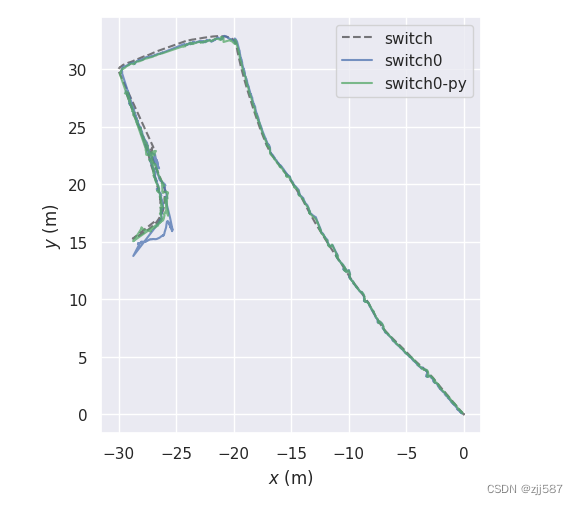
-py:设置偏移量,0:配置文件偏移量设置为0 。效果较好。
六、Bridge_01
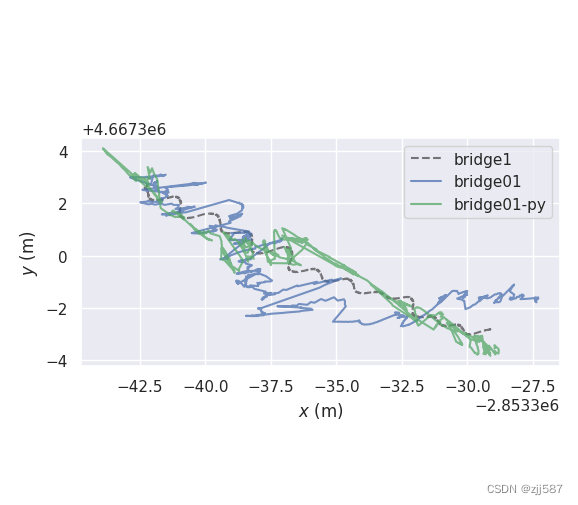
-py:设置偏移量,01:配置文件偏移量设置为0 。完全失败。
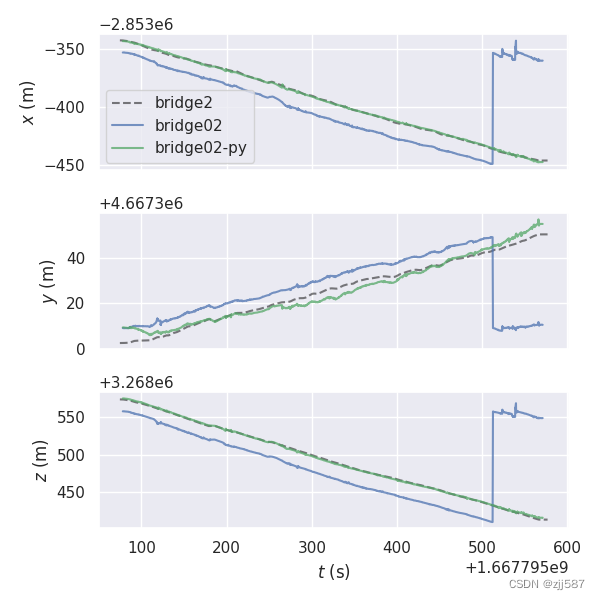
七、Bridge_02
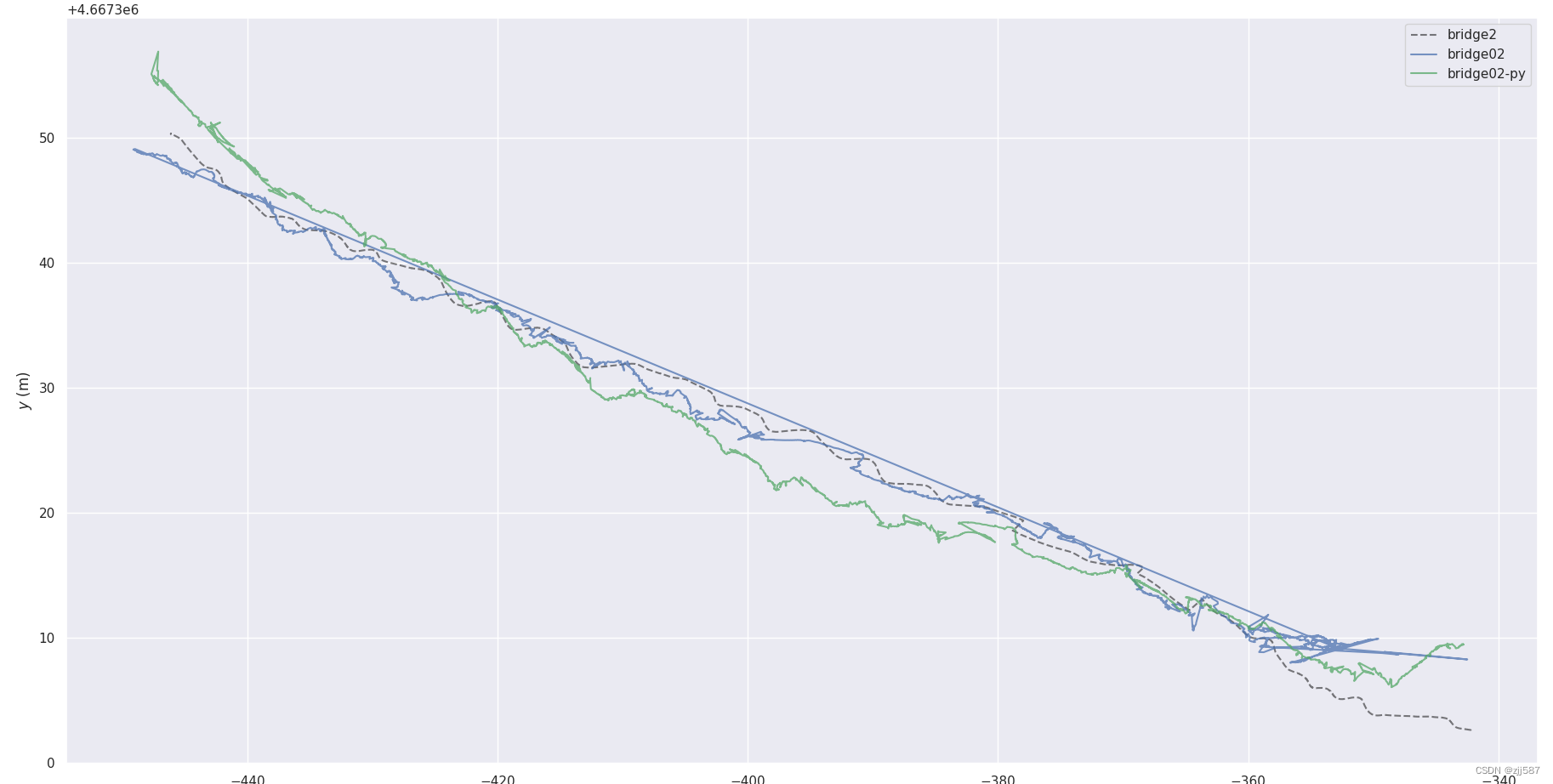
-py:设置偏移量,02:配置文件偏移量设置为0 。效果一般。
八、Street_01
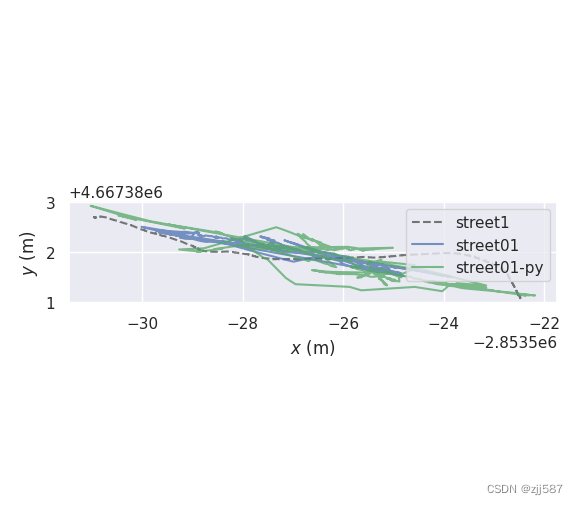
-py:设置偏移量,01:配置文件偏移量设置为0 。完全失败。
九、Street_02
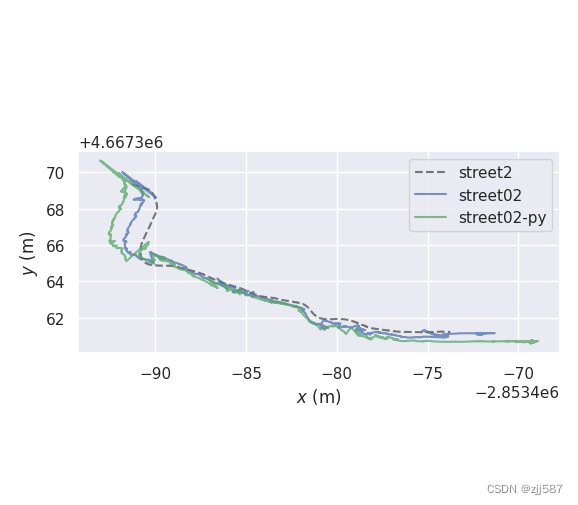
-py:设置偏移量,02:配置文件偏移量设置为0 。效果一般,存在一定漂移。
十、Parking_01
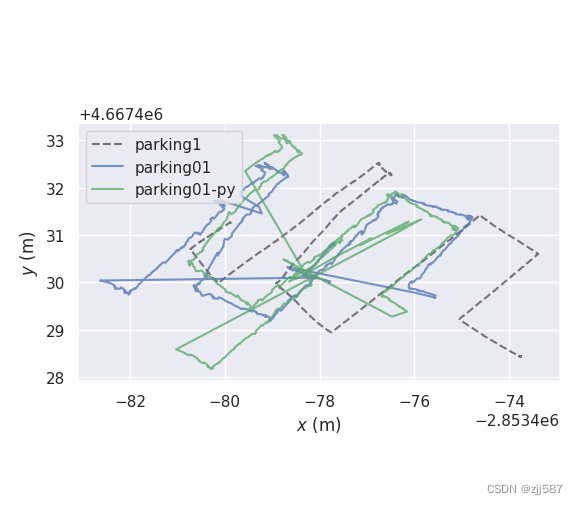
-py:设置偏移量,01:配置文件偏移量设置为0 。完全失败。
十一、Parking_02
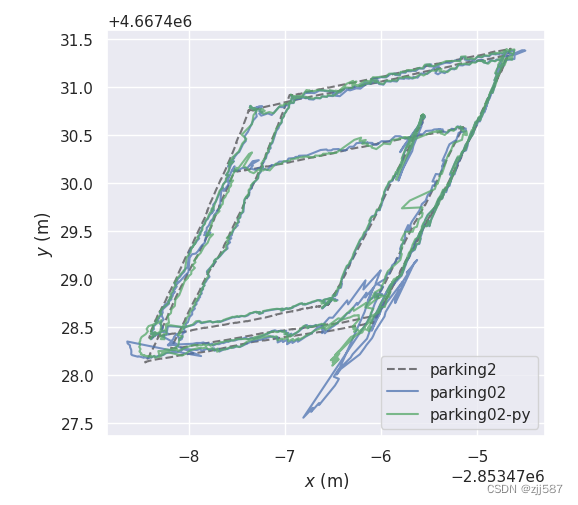
-py:设置偏移量,02:配置文件偏移量设置为0 。效果一般,欧拉角抖动厉害。
十二、Building_01
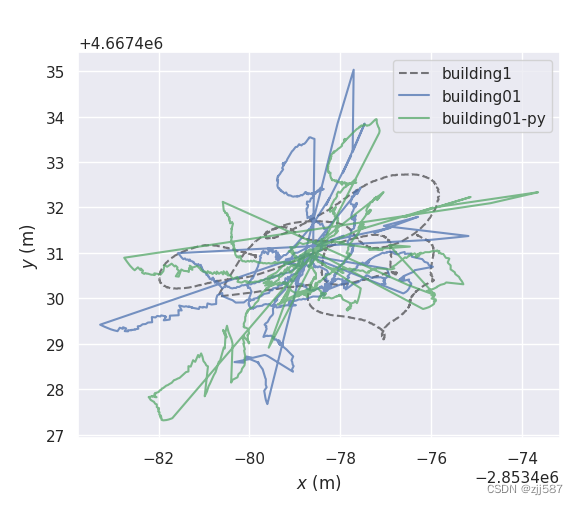
-py:设置偏移量,01:配置文件偏移量设置为0 。完全失败。
十三、Building_02
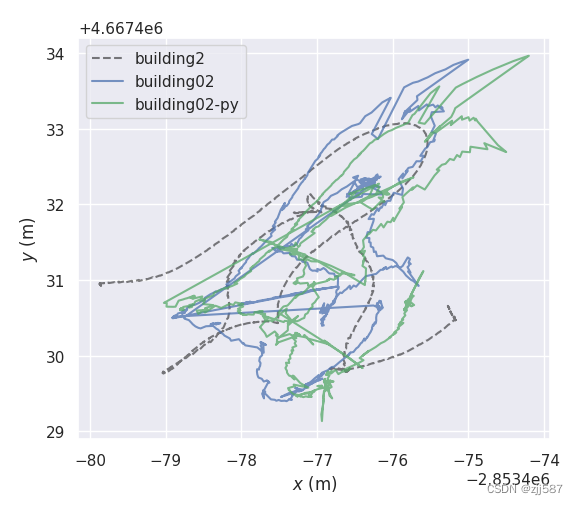
-py:设置偏移量,02:配置文件偏移量设置为0 。建图失败。
总结
运用evo对lvi_sam在m2dgr上的序列进行评估,-py 表示配置文件设置偏移量。
ATE RMSE(m) of lvi_sam:
| 方法/序列 | Anomaly | Switch | Tree | Bridge_01 | Bridge_02 | Street_01 | Street_02 | Parking_01 | Parking_02 | Building_01 | Building_02 |
|---|---|---|---|---|---|---|---|---|---|---|---|
| lvi_sam0 | 0.048359 | 0.462585 | 1.043782 | 1.438985 | 63.742425 | 2.84877 | 1.36384 | 3.61579 | 0.139719 | 2.676198 | 1.849332 |
| lvi_sam | 0.045775 | 0.263453 | 2.264965 | 1.223112 | 2.90975 | 2.810427 | 2.841433 | 3.888655 | 0.087718 | 2.876445 | 1.166187 |
| 建图大致效果 | 成功 | 成功 | 成功 | 失败 | 成功 | 失败 | 成功 | 失败 | 成功 | 失败 | 失败 |
lvi_sam0代表在配置文件中传感器间的偏移量设置为零。对比发现平移量对lvi_sam精度影响不大。
其中Anomaly、Switch、Tree、Bridge_02、Street_02、Parking_02 建图大致成功。Bridge_02中lvi_sam0存在异常数据,因为在末尾突然存在大的漂移,导致建图失败。如下图所示。














 2326
2326











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









