







三维射影变换群的子群
仿射变换群
三维仿射变换是:
 ,其中
A
是一个
3
阶可逆矩阵
,其中
A
是一个
3
阶可逆矩阵
仿射不变量
1. 保持无穷远平面不变,即将无穷远点变换到无穷远点;
2. 保持直线与直线、直线与平面以及平面与平面之间的平行性;
3. 保持物体的体积比、平行图形
(
或在同一平面上的图形
)
的面积比、平行线段
(或在同一直线上的线段
)
的长度比不变。
射影变换
H
保持无穷远平面不变的充要条件是
H
为仿射变换。
相似变换群
相似变换定义:
 ,其中,
U
是三维正交矩阵,
s
是相似比例因子。
,其中,
U
是三维正交矩阵,
s
是相似比例因子。
相似变换群是三维仿射群的子群
射影变换
H
保持绝对二次曲线不变的充要条件是
H
为相似变换。
射影变换 H 保持绝对二次曲面
 不变的充要条件是
H
为相似变换。
不变的充要条件是
H
为相似变换。
等距变换群
等距变换定义:
等距变换群的重要不变量是保持物体形状和体积不变。等距变换是特殊的相似变换,它具有相似变换的一切特性,如保持绝对二次曲线和绝对二次曲面不变。
一个射影变换的不动点是指在这个变换下保持不动的空间点。在代数上,一个空间点
X
是射影变换
H
的不动点的充要条件是
X
为
H
的特征向量,即
H
X
=
X
(
注意:这是一个齐次等式,齐次因子是与特征向量
X
对应的特征值
)
。
(1)
设
E
是一个欧氏变换,则正交于旋转轴的平面上的两个圆环点是
E 的两个不动点,它们是
E
的两个互为共轭复特征向量;旋转轴与无穷远平面的交点是
E 的另一个不动点,它是E
的特征值
1
的特征向量。如果
E
为一般欧氏运动,
E
仅有上述三个不动点。
(2) 如果平移向量在与旋转轴正交的平面上
(
通常称为平面运动
)
,则
E
还存在另外的不动点,它是
E
的特征值
1
的另一个
特征向量。
在几何上,空间旋转变换
R
有两个不变子空间,一个是旋转轴构成
R 的一维不变子空间,其上的每一点在旋转变换
R
下是不动的;另一个是与旋转轴正交且通过坐标原点的平面,它构成
R 的一个二维不变子空间
(
R
在这个不变子空间上不是点点不动的
)
,由于 R 限制在这个平面上是一个二维旋转变换,所以这个平面上的两个圆环点是保持不动的。空间的平移变换是一个保持平行性的变换,并且在无穷平面上保持点点不动。由于欧氏变换
E
是先进行旋转
R 再作平移所构成的变换,所以旋转轴上的无穷远点是它的一个不动点,与旋转轴正交平面上的两个圆环点也是它的不动点。如果平移向量在与旋转轴正交的平面上,除了这三个不动点外还有另一个的不动点,这个不动点是由平移向量所确定的。
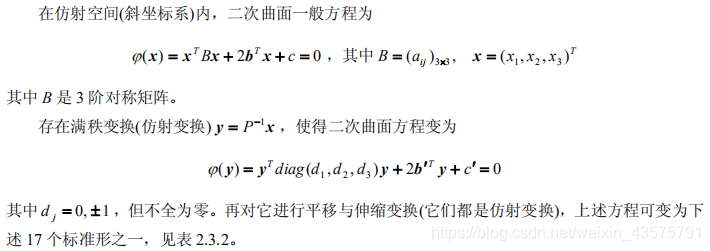
二次曲面的分类
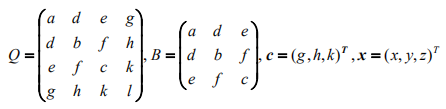
在三维欧氏空间中,二次曲面的一般方程为

其中:
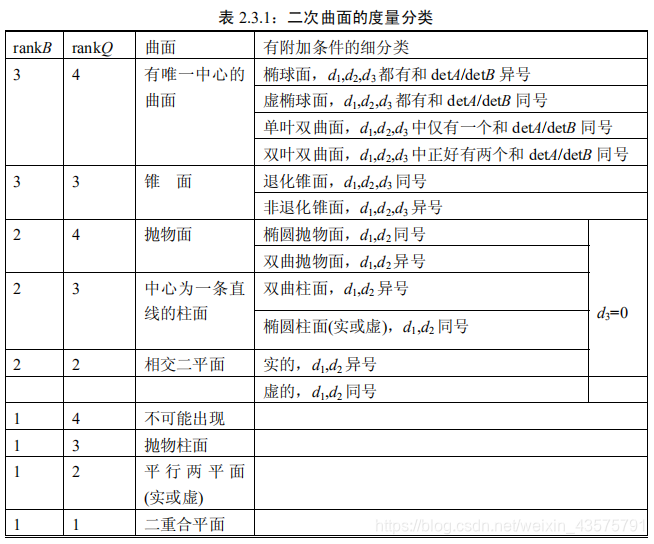
欧氏变换不改变矩阵的秩,通过
Q
,
B
的秩、行列式以及
B 的特征值的符号,可得到二次曲面的度量分类
度量分类是二次曲面的一种形状分类,它不是欧氏变换的等价性质,即同一种类型的二次曲面不能通过欧氏变换相互转化
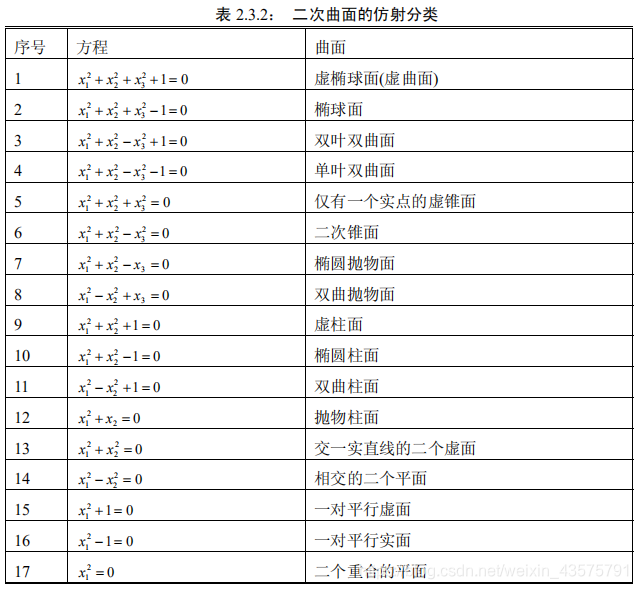
仿射分类
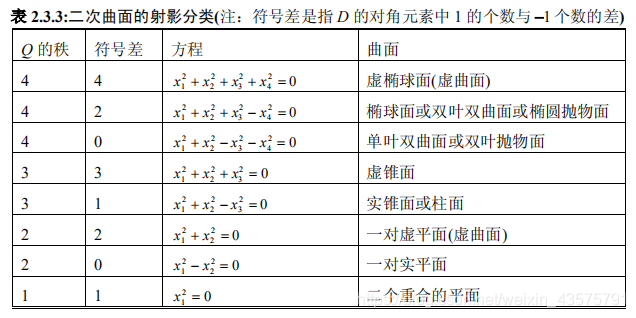
射影分类
由于二次曲面的矩阵
Q 是对称的,所以它可以分解为
 ,这里 U
是一个实正交矩阵而
D
是一个实对角矩阵。通过对
U
的四列各自进行适当的伸缩,可以将
Q 分解成
,这里 U
是一个实正交矩阵而
D
是一个实对角矩阵。通过对
U
的四列各自进行适当的伸缩,可以将
Q 分解成
 ,这里 D
是对角元素取
0, 1,
或
−
1
的对角矩阵,并且使
D
的零对角元素出现在对角线的最后,
+1 出现在最前面,而
−
1
次之
。显然,
H
是一个射影变换,因此二次曲面
Q 通过射影变换
H
必
(
射影
)
等价于二次曲面
D
。因此,对角矩阵
D 的每一种形式代表了二次曲面的一种射影等价类。
,这里 D
是对角元素取
0, 1,
或
−
1
的对角矩阵,并且使
D
的零对角元素出现在对角线的最后,
+1 出现在最前面,而
−
1
次之
。显然,
H
是一个射影变换,因此二次曲面
Q 通过射影变换
H
必
(
射影
)
等价于二次曲面
D
。因此,对角矩阵
D 的每一种形式代表了二次曲面的一种射影等价类。
射影坐标系与射影坐标变换
A
,
B
,
C
,
D、E 的新齐次坐标分别为
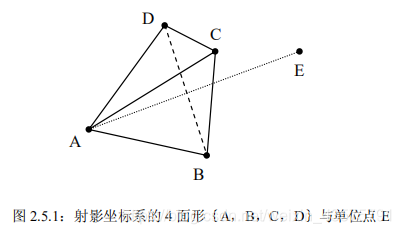
这样建立起来的坐标系称为射影坐标系,并称
A
,
B
,
C
,
D
所构成的
4
面形为射影坐标系的
4 面形;E
称为单位点;
A
,
B
,
C
,
D
、
E
称为射影坐标系的基点
。不难看出以欧氏坐标
(或仿射坐标
)
为基础的齐次坐标系是一种特殊的射影坐标系,其坐标 4 面形的顶点是三个坐标轴的无穷远点和坐标原点,而单位点是非齐次坐标为
 的空间点。
的空间点。
值得说明的是以下几点:
1. 在以一般射影坐标系为基础的三维射影空间中,无穷远点、无穷远直线与无穷远平面在以欧氏坐标系
(
或仿射坐标系
)
为基础的代数形式都消失了,即不再有表示它们的那种
(欧氏坐标系中的
)
特殊代数形式,所有的几何元素的地位都是同等的。
2. 可以在一般射影坐标系下讨论平面的齐次坐标,二次曲面,射影变换等等。
3. 在以一般射影坐标系为基础的三维射影空间中的射影变换不再有层次之分,如相似变换、仿射变换、欧氏变换等等。因此,上节中关于射影变换的分层以及特殊变换的特征,都只是在以欧氏坐标系为基础的射影空间中才成立,正如我们不能在仿射坐标系下讨论欧氏变换一样。
射影坐标变换
令
 , 是两个一般射影坐标系,
, 是两个一般射影坐标系,
 是以欧氏坐标为基础的特殊射影坐标系,点 P 在这三个坐标系下的坐标 分别为
是以欧氏坐标为基础的特殊射影坐标系,点 P 在这三个坐标系下的坐标 分别为
 ,
,
 的射影坐标变换分别为
的射影坐标变换分别为

出射影坐标变换也具有射影变换的形式。射影坐标变换具有射影变换的形式,不是偶然的,因为可以给射影变换以两种解释。
第一种解释:射影变换是同一个坐标系中空间点之间的变换,坐标系没有发生变化,图形发生变化,不但位置发生了变化,连整个图形的形状也发生了变化。当然,变换前、后的图形在同一个坐标系下的代数形式也发生了变化。
另一解释:射影变换是不同坐标系之间的变换,图形不发生变化,而是坐标系发生变化,这种变化使得同一个图形具有不同的代
数形式。为区别前一种解释,后一种解释的射影变换通常称为射影坐标变换。这两种对射影变换的解释没有本质上的差异,只是观察的角度不同而已。前一种是立足于坐标系观察变换
(
运动
),后一种是立足于变换
(
运动
)
观察坐标系。

















 4356
4356

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









