







平面与空间射影几何小结——空间射影几何
射影空间

空间平面


平面在三维空间中有 3 自由度。
空间平面上的无穷远直线表示
无穷远直线=平面法向量
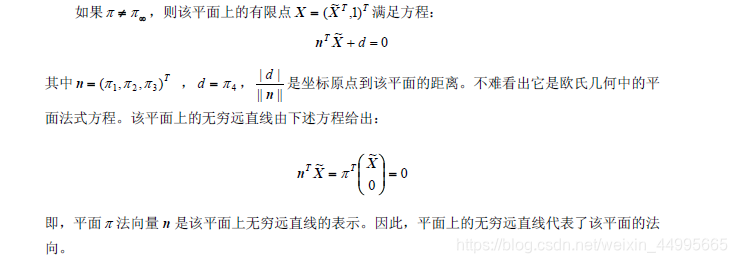
点在无穷远平面上,则w=0,且点还在平面上,所以得到上述方程。
平行关系判定

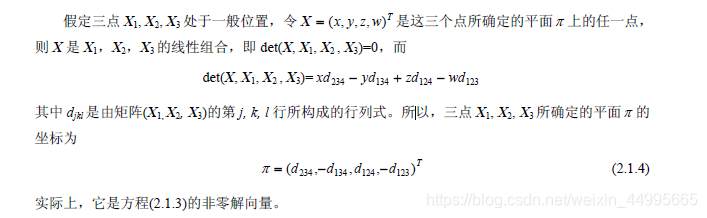
三点确定一个平面

- 三点不共线,确定一个平面。
- 三点共线,确定一个以直线L为轴的平面束。
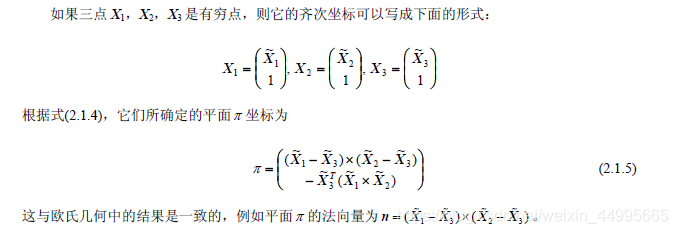
三点确定平面的具体计算方法
另一种解法:
三个平面确定一点
一般位置上的三个平面能唯一确定一个点(有可能是无穷远点)。

如果三个面共一条直线 L,此时系数矩阵有二维(右)零空间,因而不能唯一确定点X,实际上在直线L上的所有点都满足方程。
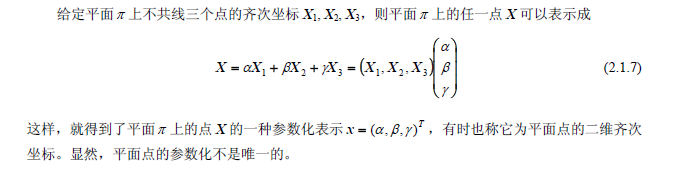
平面点的参数化
空间直线
这是因为对于直线上任何一个异于A、B 的点C,有C = A + sB。
直线的点表示(矩阵W包含两个点)

L点束与过轴L平面束(W)
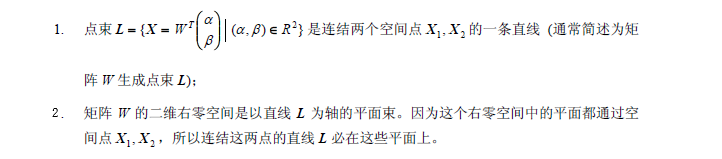
- 线性组合为L上的点束。
- 右零空间为过轴的平面束。
直线的面表示(矩阵W*包含两个面)

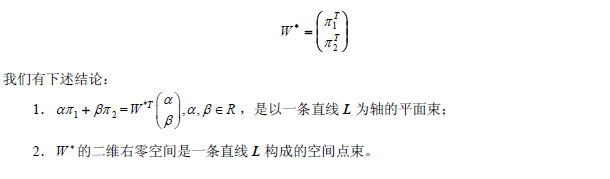
L点束与过轴L平面束(W*)
- 线性组合为过轴的平面束。
- 右零空间为L上的点束。
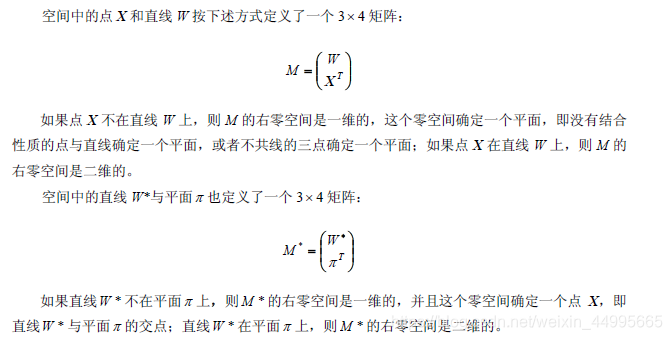
M与M矩阵(W与W的拓展)
直线的Plucker 矩阵表示(两点构成矩阵L)
L点束与过轴L平面束(Plucker L)

- 连结A,B 的直线是矩阵L的二维(右)零空间所确定的平面束的轴线。

- 空间直线有4 个自由度。因为反对称矩阵L 有6 个非零元素,但仅有5个比率是有意义的,另外L 满足约束det(L)=0,所以直线的自由度是4。
直线的对偶Plucker 矩阵表示(两面构成矩阵L*)

L*与L的关系(表示同一条直线)
A、B在P、Q上,推得
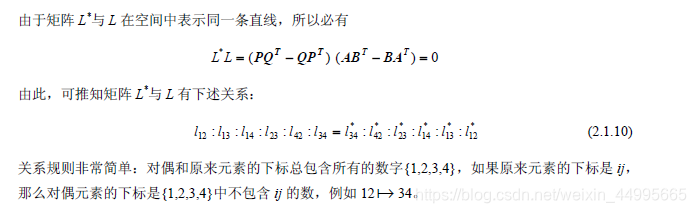
Plucker 矩阵结论
L*与线外一点X确定一平面

直线与平面的交点

两(或更多)条线 L1, L2 的性质,可以由矩阵M = (L1, L2, …)的零空间推出。

直线的Plucker 坐标
Plucker 直线坐标是4×4 反对称Plucker 矩阵L 的六个非零元素,即


( L | L^)判断两直线相交(共面)

由于两直线L, Lˆ 相交的充要条件是 4点A, B, Aˆ , Bˆ 共面,而4 点共面等价于det(A,B, Aˆ ,Bˆ ) =0。于是,我们有下述结论:

共线平面束的交比
平面Mobius公式计算四共点线交比(将线束交比计算转换为点交比)
- 四该共线点的交比等于该线束的交比
- 设线束的交点为 o,{xˆ j : j =1,…,4}分别为这四条直线上不同于o 的点
则四共点线的交比可由Mobius 公式计算:

平面束的交比
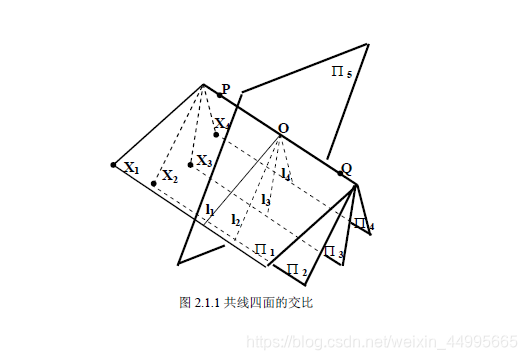
四共线平面束被第五个平面所截,得到四条共点直线。定义平面束的交比为

共线平面束Mobius公式

三维射影变换
三维射影变换
三维射影变换是射影空间上的可逆齐次线性变换,这个变换可由4 × 4 的矩阵H 来描述:
X ′ = HX
三维射影变换有15 个自由度,即射影变换矩阵可由它的元素所构成的15个比值唯一确定。
三维射影变换将空间上的点(线、面)变换到点(线、面),并且保持点的共线(面)性、线的共面性等性质。
任何三维射影变换的逆变换都是三维射影变换、任意两个三维射影变换的合成(对应于两个单应矩阵的积)也是三维射影变换。
因此,三维射影变换的全体构成三维射影空间上的一个变换群,称它为三维射影变换群。
点的射影变换规则(5 点确定三维射影变换)


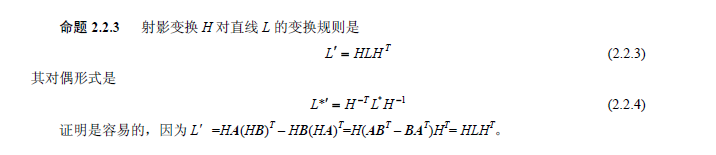
平面与直线的变换规则
平面射影变换规则

直线Plucker 矩阵L的变换规则
二次曲面与变换规则
总的来说联立已知方程求解应该可得到相关性质。
二次曲面的基本性质

其中Q 是4×4 的对称矩阵。如果Q 是降秩的,则称它为退化二次曲面,否则称为非退化二次曲面。
性质:
自由度

直线与Q的交点

平面π 与二次曲面Q 的交是一条二次曲线;
二次曲面相交为四次曲线

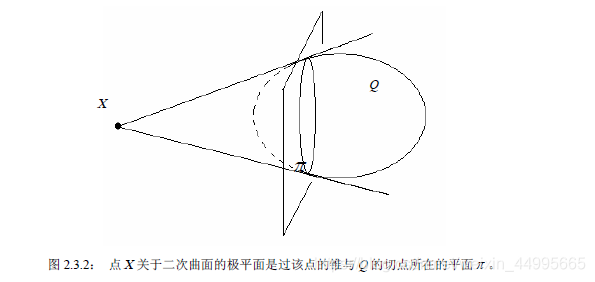
非退化的二次曲面切面与切点
二次曲面的配极对应


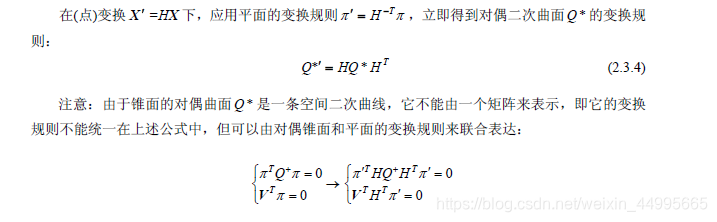
二次曲面变换规则

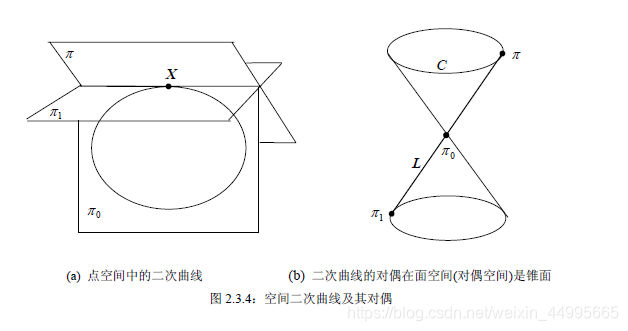
二次曲面的对偶
- 空间曲面的对偶是指以该曲面的切平面为基本元素在对偶空间(面空间)中所构成的曲面,通常称对偶曲面。
- 在一般情况下,二次曲面的对偶仍为一个二次曲面。
- 令Q 是一个二次曲面,它的对偶曲面记为Q*,按照对偶曲面的定义Q的基本元素是Q 的切平面,也就是说它是Q 的所有切平面所构成的平面集合,而Q 是Q中的所有平面所形成的包络。
- 在计算机视觉中,二次曲面的对偶,尤其是锥面与空间二次曲线的对偶具有特别的重要性。
非退化二次曲面的对偶(det(Q) ≠ 0)
二次曲面的对偶仍为一个二次曲面。
切平面π满足


锥面的对偶(rank(Q) = 3)
由于rank(Q) = 3,所以 Q 有一维零空间,并且零空间的元素是锥面 Q 的顶点 V 的齐次坐标,即QV=0 的非零解。
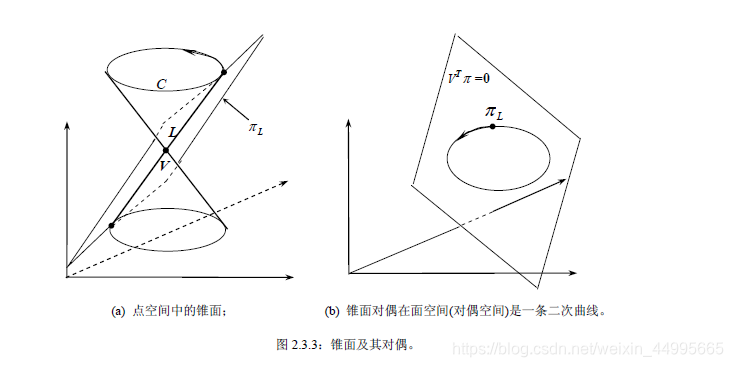
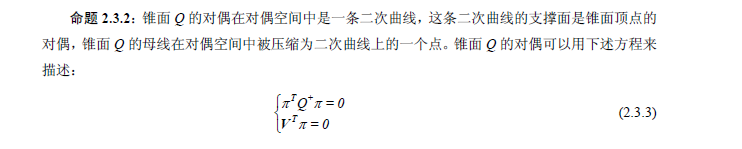
- V的对偶空间:满足方程VTπ =0,将V的坐标直接作为面,将π作为点。
- 锥面母线L上的点,除顶点外,都有相同的切平面πL,即母线L上所有点的对偶是同一“点” πL。
- 当母线L 绕基线C 运动时,πL 在对偶空间中的轨迹将是“平面” V 上的一条“点”曲线。所以,锥面的对偶是一条平面曲线。
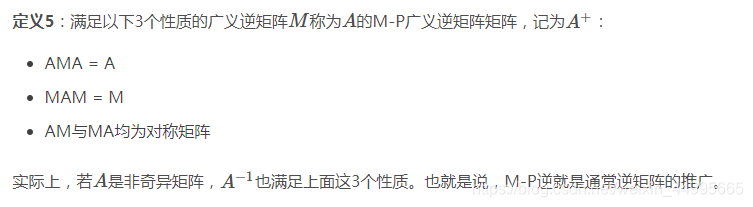
- Q+为Q的广义逆。
广义逆矩阵
空间二次曲线的对偶
用面围出二次曲线,总结这些面满足的方程

对偶二次曲面的变换规则
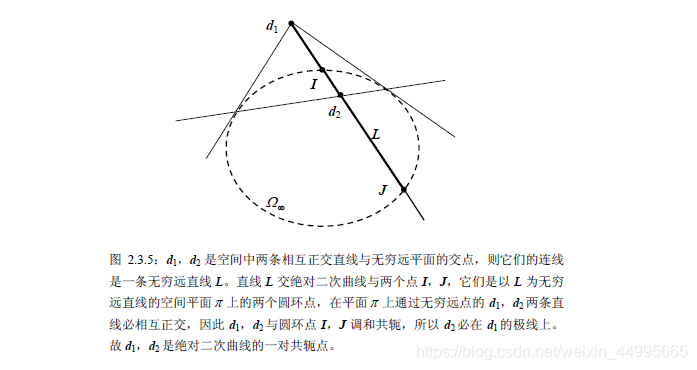
绝对二次曲线与绝对二次曲面
绝对二次曲线(无穷远面π∞上的二次曲线Ω∞)
圆环点的升级版,变成了线。
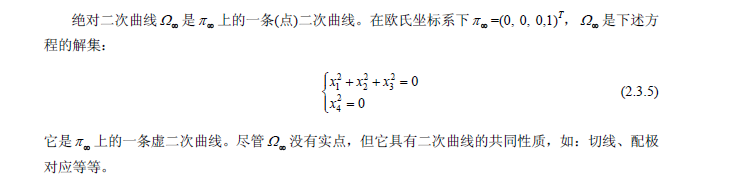
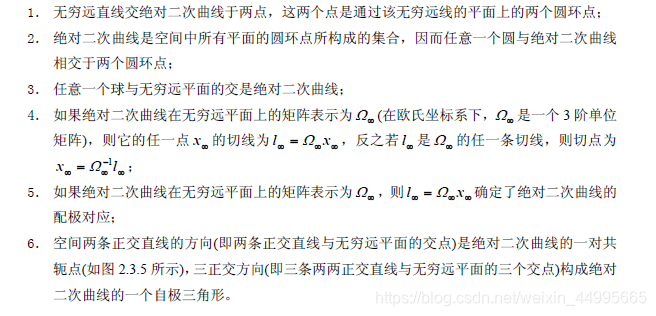
下面不加证明地引进一些常用性质:
平面圆环点确定思路:X在绝对二次曲线上,X在π平面上,x4=0,联立求解x1,2,3相差一个比例系数。
?空间中如何表示一个面的无穷远直线?

射影空间中两直线的夹角


基本思想:在无穷远平面上是成立的,利用射影变换H可以将欧氏空间变换到一般射影空间,并且射影变换将平面映射为平
面(平面射影变换)。
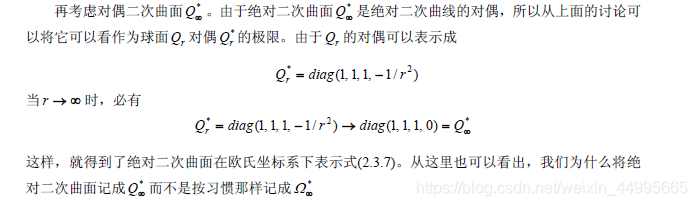
绝对二次曲面
(对偶二次曲线是过圆环点的所有直线束)Q*∞ 是所有与 Ω∞ 相切的平面所构成的集合。



绝对二次曲面在射影坐标系下有8 个自由度,因为它是退化的对偶二次曲面。这8个自由度也是在一般射影坐标系下确定度量性质所要确定的自由度。
两平面的夹角
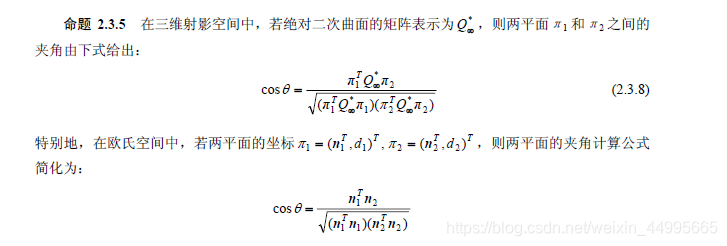
代数表示的几何解释
在三维计算机视觉中,尤其在摄像机自标定与三维重构理论中,绝对二次曲线和绝对二次曲面处于十分重要的地位。
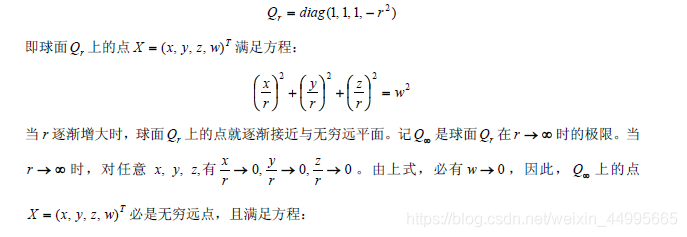
可以将绝对二次曲线作为球面Qr 在r → ∞时的极限。
三维射影变换群的子群
仿射变换群

仿射不变量
1. 保持无穷远平面不变,即将无穷远点变换到无穷远点;
2. 保持直线与直线、直线与平面以及平面与平面之间的平行性;
3. 保持物体的体积比、平行图形(或在同一平面上的图形)的面积比、平行线段(或在同一直线上的线段)的长度比不变。
相似变换群

相似不变量
相似变换除了仿射不变量作为它的不变量之外,最本质的不变性质是绝对二次曲线与绝对二次曲面。
等距变换群
如果限制U 是一个三维旋转矩阵,则上述变换称为欧氏变换。

在代数上,一个空间点X 是射影变换H 的不动点的充要条件是X 为H 的特征向量,即HX=X

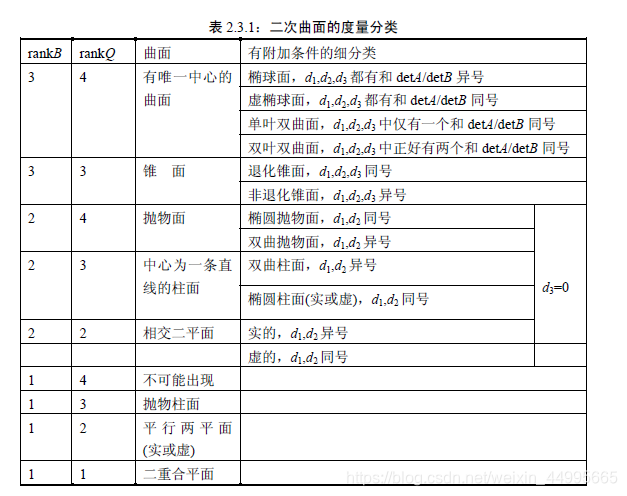
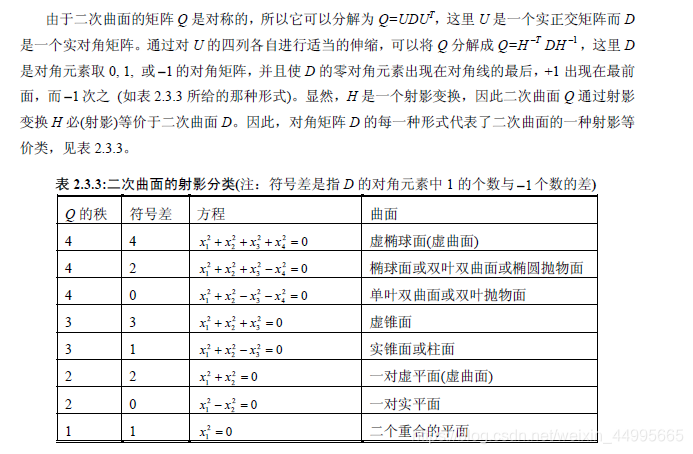
二次曲面的分类
度量分类

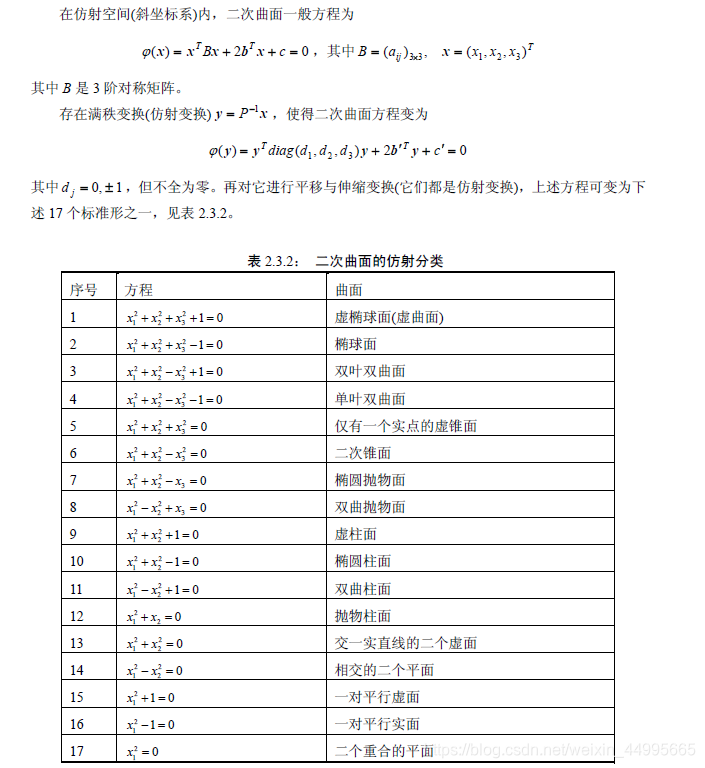
仿射分类
射影分类
射影坐标系与射影坐标变换

其中u j不全为零。因为u j的比值不能唯一确定,必须再加约束条件。
此时

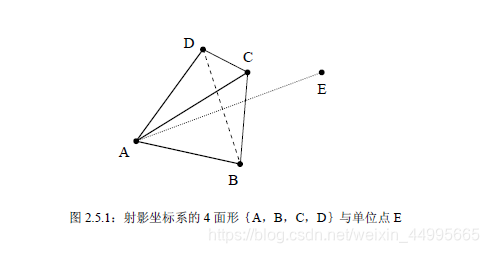
射影坐标系
特别地,A,B,C,D、E 的新齐次坐标分别为

这样建立起来的坐标系称为射影坐标系,并称A,B,C,D 所构成的4 面形为射影坐标系的4 面形;A,B,C,D、E 称为射影坐标系的基点(如图2.5.1 所示)。不难看出以欧氏坐标(或仿射坐标)为基础的齐次坐标系是一种特殊的射影坐标系。
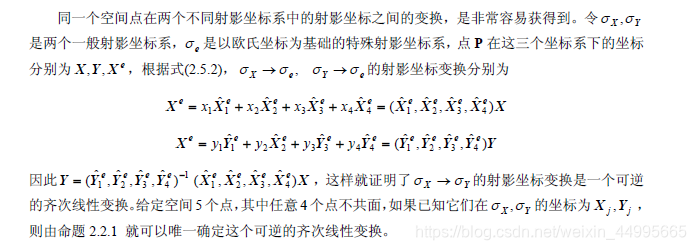
射影坐标变换

















 98
98

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









