







以下部分参考博客参考的超级详细的博客
状态方程的推导
-
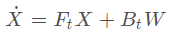
一般卡尔曼滤波状态的表达式:
-
IMU误差方程
-
公式

-
delta和eps表示的是固定值,所以,最后求导的结果为0。

- 选取的状态量
- 选取的状态量的维度是:15 * 1


- 对应的小公式
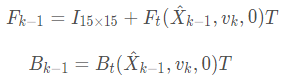
- 计算F和B的公式

-
表示差分的4个量

-
表示差分的公式

-
求解FK

-
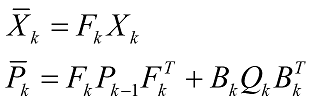
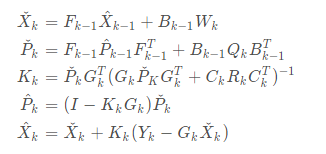
预测步中的更新状态量和方差的过程
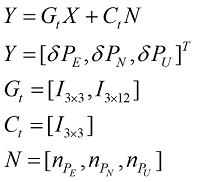
观测方程的推导
- 观测方程中误差只能是线性的,因为只给出了一个位置N表示对应的观测噪声
经典ESKF五大公式
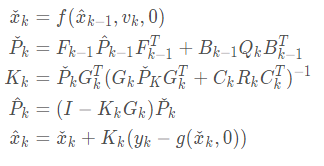
离散化的计算过程
- 因为状态方程给出的都是连续的一个形式,但是实际上计算过程都是离散的
最终位姿估计计算的公式














 3万+
3万+











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









