






Ubuntu下ORB_SLAM2的安装与配置
ORB-SLAM是由Raul Mur-Artal,J. M. M. Montiel和Juan D. Tardos于2015年发表在IEEE Transactions on Robotics。ORB-SLAM是一个基于特征点的实时单目SLAM系统,在大规模的、小规模的、室内室外的环境都可以运行。该系统对剧烈运动也很鲁棒,支持宽基线的闭环检测和重定位,包括全自动初始化。该系统包含了所有SLAM系统共有的模块:跟踪(Tracking)、建图(Mapping)、重定位(Relocalization)、闭环检测(Loop closing)。由于ORB-SLAM系统是基于特征点的SLAM系统,故其能够实时计算出相机的轨线,并生成场景的稀疏三维重建结果。ORB-SLAM2在ORB-SLAM的基础上,还支持标定后的双目相机和RGB-D相机。
实验内容
一、安装工具
二、安装Pangolin作为可视化和用户界面
三、安装OPenCV,用于处理图像和特征
四、安装Eigen3
五、安装ORB_SLAM2
六、运行单目SLAM实例
一、安装工具
(1)更新软件源
sudo apt update
(2)安装git,用于从GitHub上克隆项目包到本地

(3)安装Cmake用于程序的编译
(4)安装gcc,g++

二、安装Pangolin
(1)安装依赖项
(2)从GitHub将项目下载到本地
(3)编译安装




安装:

三、安装OpenCV
(1)安装依赖项


(2)在OPenCV官网(http://opencv.org)下载OpenCV 3.4.1 的source包然后解压到本地
(3)编译安装




编译成功:

编译过程会花费较长时间,电脑CPU性能较低的建议不要使用make -j,容易卡死;CPU性能较高的可以使用make -jx,x代表线程,可加速编译。
安装:

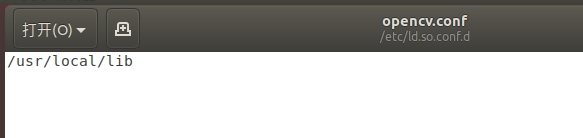
(4)配置OpenCV的环境

打开之后可能是一个空白的文件,直接在文件末尾添加以下内容就可以了:
保存回到命令行界面,使刚才的配置生效:

配置bash:sudo gedit /etc/bash.bashrc
在文件末尾添加:

保存之后还要使刚才的配置生效:

四、安装Eigen3
五、安装ORB_SLAM2
克隆项目包到本地:

编译ORB_SLAM2和第三方库DBoW2和g2o:


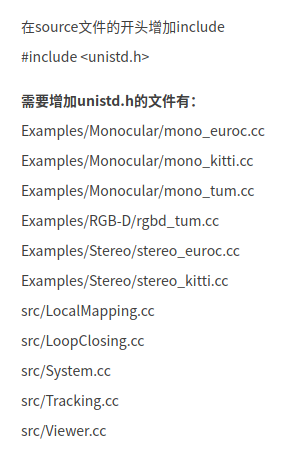
编译过程中会遇到以下问题:

是因为有一些代码中需要引入unistd.h头文件:
再重新编译,编译成功:编译过程需要花点时间,要耐心等待

六、运行SLAM单目实例
下载数据集:
有TUM、KITTI、EuRoC三种数据集,本实验使用TUM数据集,从http://vision.in.tum.de/data/datasets/rgbd-dataset/download 下载序列并解压缩。这便是解压后的数据集:

运行:
GitHub上给出的命令格式:
./Examples/Monocular/mono_tum Vocabulary/ORBvoc.txtExamples/Monocular/TUMX.yaml PATH_TO_SEQUENCE_FOLDER
其中PATH_TO_SEQUENCE_FOLDER为数据集的存储路径,并将tumx.yaml与下载的数据集对应,比如TUM1.yaml,TUM2.yaml 和TUM3.yaml 分别对应 freiburg1, freiburg2 和 freiburg3。

















 1024
1024











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









