






Matlab Simulink提供的控制参数整定效果还是值得肯定的,在此记录本人进行PID参数整定的过程,有不对之处忽略即可,但更欢迎批评指正。
资料引用(基于Matlab官方)
Cascade Digital PID Control Design for Power Electronic Converters
Multiloop Control Design for Buck Converter
引用资料的两个例子分别介绍了逐级调参和同时调参两个方法,下面对其分别进行说明
考虑到篇幅,将分为三个部分介绍.
【1】逐级调参-内环
【2】逐级调参-外环
【3】同时调参
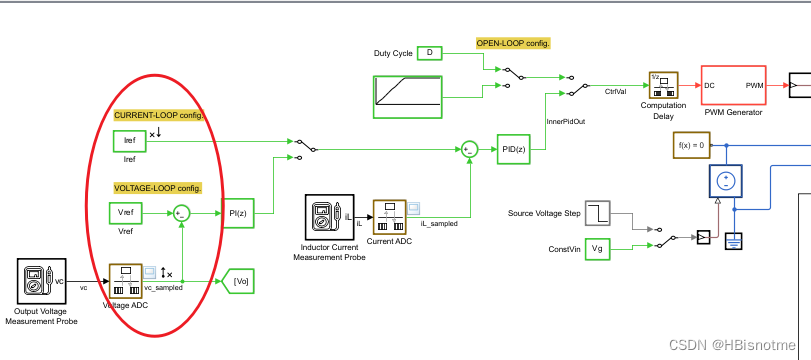
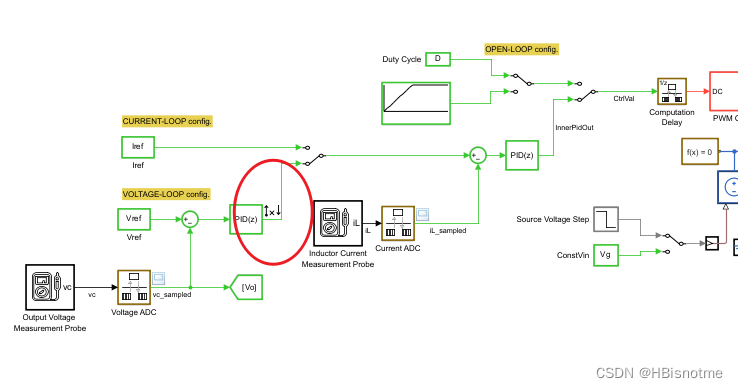
一、逐级调参(Cascade Digital PID Control Design for Power Electronic Converters)
2. 外环参数整定
外环整定,简单来说,就是内环的步骤再来一遍。
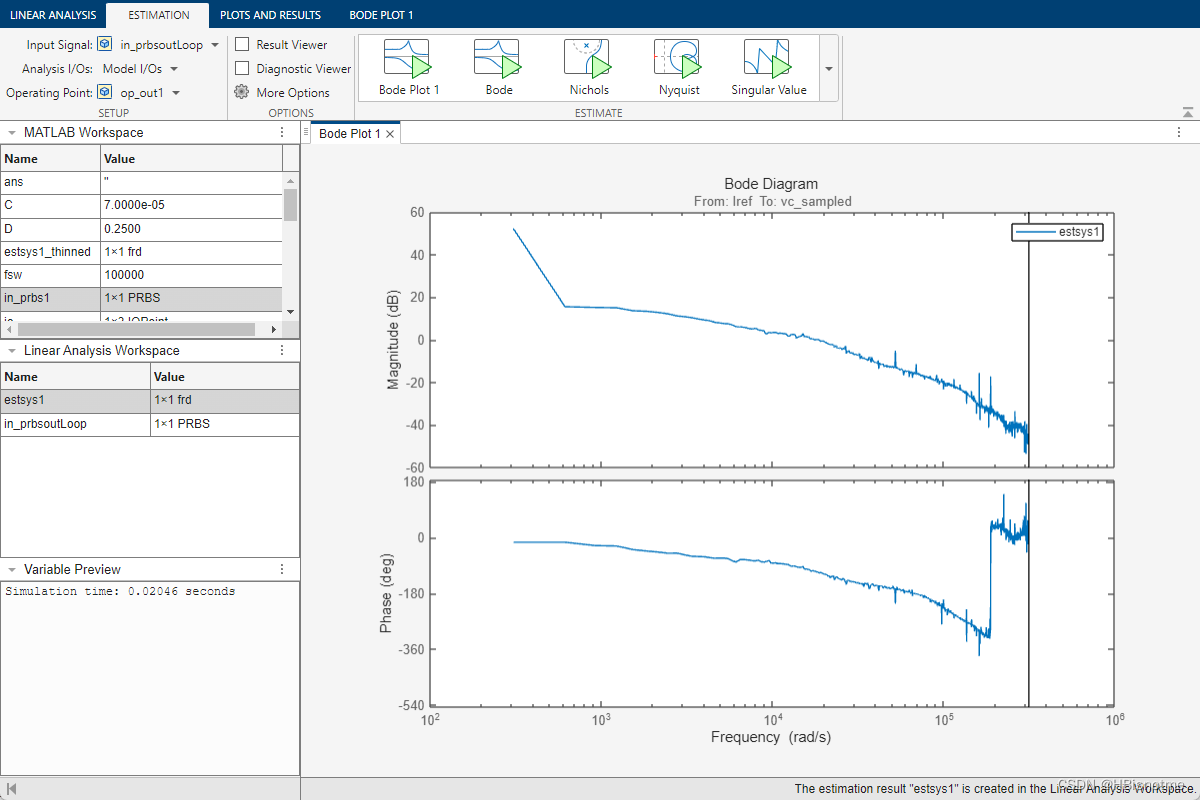
① 先分析开环响应特性
使用为内环电流控制器定义的相同PRBS输入信号。除振幅外,所有参数均相同,振幅从 0.05 增加到 1 以提高信噪比。
得到的传递特性如下图
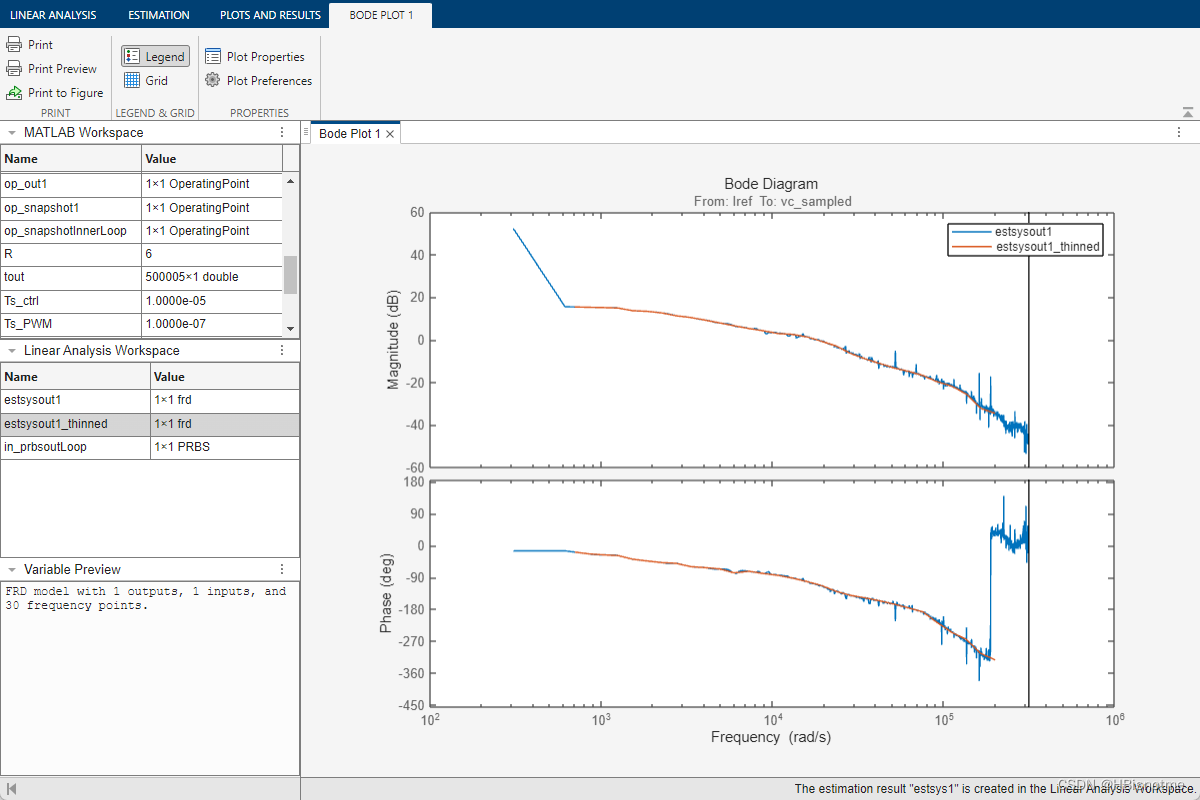
② 获得简化非参模型
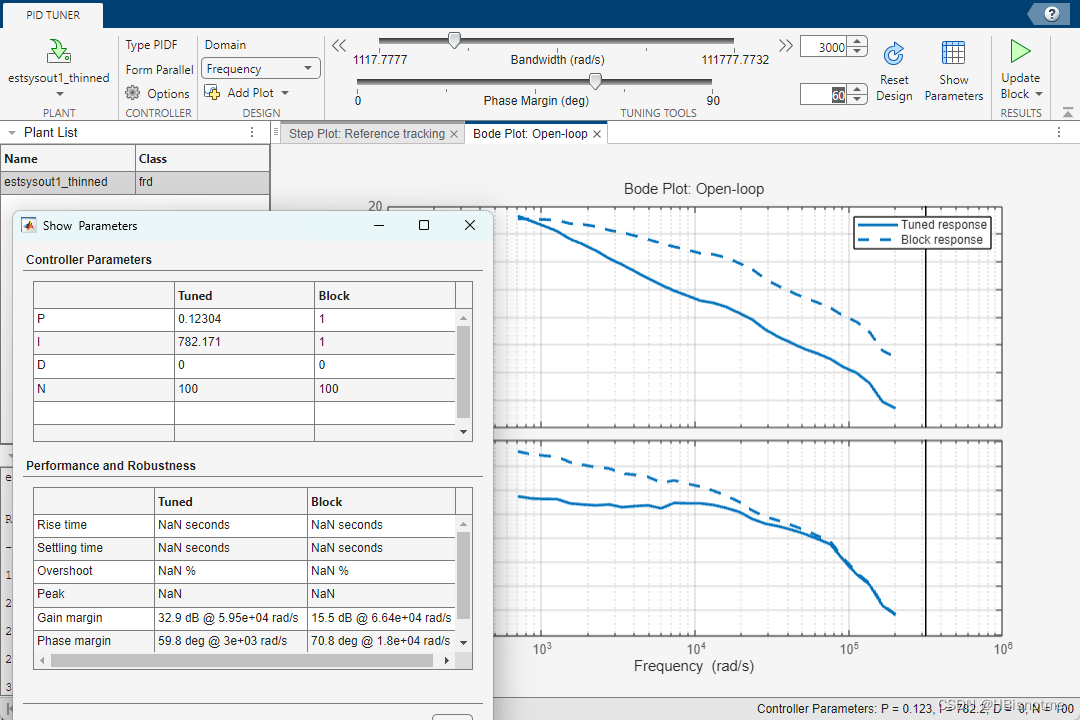
③ 使用PID Tuner进行调参
通过将带宽设置为 3e3 rad/s(通常,外环路的调谐速度比内环路慢 10 倍)和相位裕量为 60 度来调整控制器增益
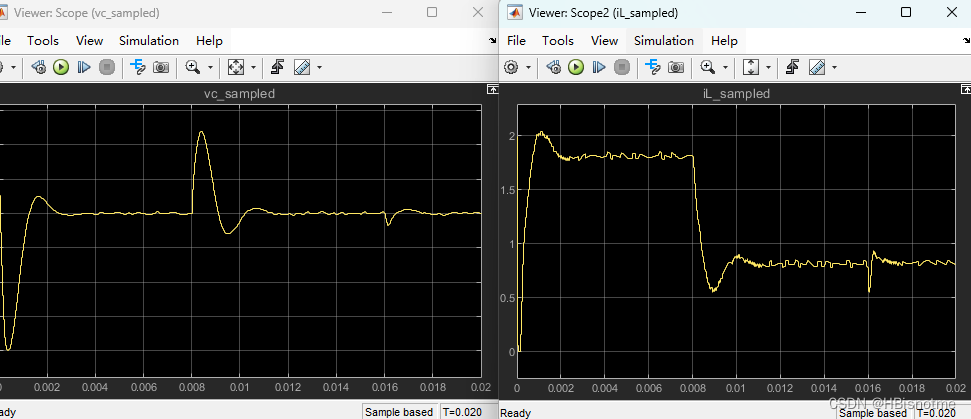
④ 更新参数并验证
时域验证如下
频域验证:
















 1079
1079

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











