






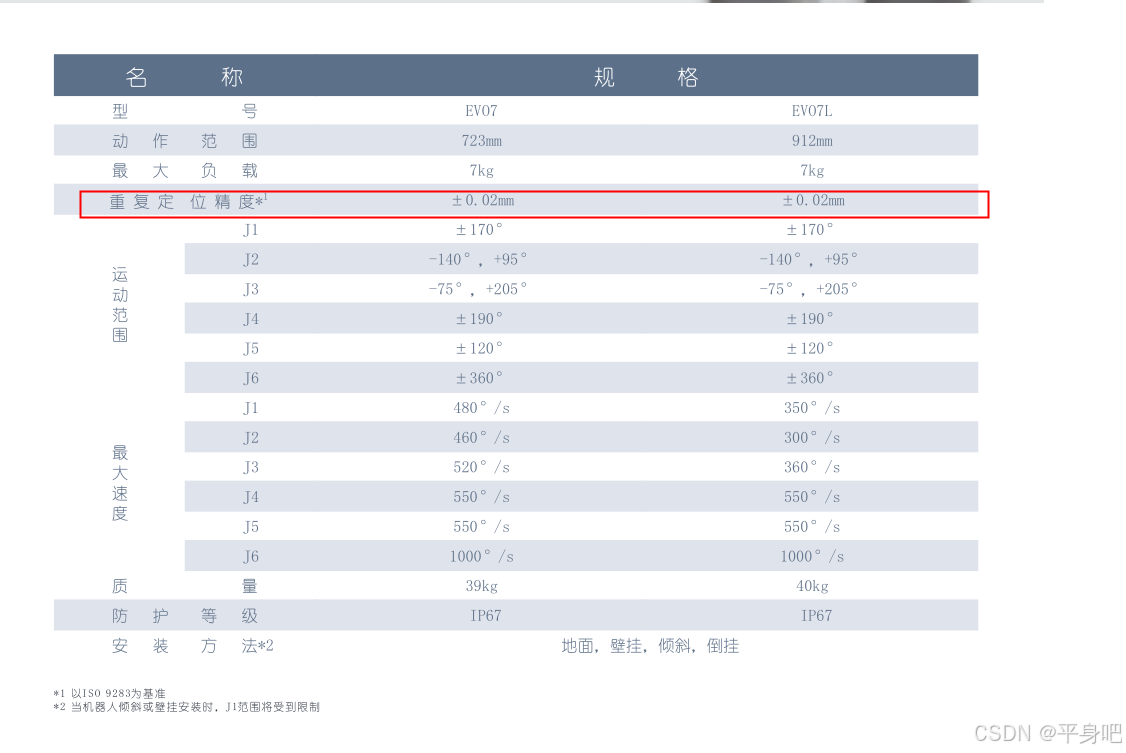
机械臂选型的时候经常会看到一个指标:重复定位精度,如图:
那么,该怎么理解这个指标呢?影响其精度的主要因素又有哪些呢?
重复定位精度实际上指的是机械臂位姿重复定位精度,就是同一个位置多次定位产生的偏差,机器人经过长时间工作后是否还能按照原定的轨迹运动,例如机器人开始能完美沿着一条轨迹运动,经过数次重复运行这条轨迹,经过测量发现每次运行与这条轨迹最大偏差 0.01mm,那么这台机器人的重复定位精度就是 0.01mm。一般要求大型机器人的重复定位精度在 0.2mm 以内,小型机器人 0.02mm 以内。
重复定位精度的大小一般与机器人的装配精度、减速机、皮带或齿轮等传动机构有关!假如传动结构精度不够或者零件磨损,会严重影响重复定位精度。
另外,机械臂还有一个重要的参数:绝对定位精度。
绝对定位精度绝对定位精度就是机器人系统里的机器人位置和实际位置的偏差值,例如我们利用控制系统看到机器人的末端距离某个点相差 10mm,但是实际测量出来相差 10.2mm,这个 0.2mm 的差值就是机器人的绝对定位精度。一般要求大型机器人的绝对定位精度在 0.3mm 以内,小型机器人 0.1mm 以内。
通常情况下,重复定位精度要比绝对定位精度高得多。两者都与机器人的装配精度、减速机、皮带或齿轮等传动机构有关,但是绝对定位精度也和程序有一定关系,例如机器人的模型参数如果没有准确录入到系统内就会造成计算出来的位置和实际位置有一定偏差。

















 8781
8781

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









