







 AstraMiniPro是一款3D结构光深度相机,采用MX6000芯片,支持高分辨率深度图像和彩色图像对齐。它适用于中远距离物体和空间扫描,广泛应用于机器人避障和体感交互等领域。用户需安装SensorDriver驱动和OpenNI开发包,通过NiViewer可查看摄像头信息。
AstraMiniPro是一款3D结构光深度相机,采用MX6000芯片,支持高分辨率深度图像和彩色图像对齐。它适用于中远距离物体和空间扫描,广泛应用于机器人避障和体感交互等领域。用户需安装SensorDriver驱动和OpenNI开发包,通过NiViewer可查看摄像头信息。
Astra Mini Pro
Astra Mini Pro 深度相机是基于 3D 结构光成像技术获取物体的深度图像,同时利用彩色相机采集物体的彩色图像,适用于 0.6m-6m 距离进行 3D 物品和空间扫描的智能产品, 可实现测量距离内的物体深度数据测量。
作为Astra Mini的迭代升级产品,Astra Mini Pro配置MX6000自研深度感知芯片,最高支持1280x1024深度图像,自带多分辨率下深度图像与彩色图像空间对齐功能,可广泛应用于机器人避障、低精度3D测量、体感交互等场景。

首先安装windows驱动:
SensorDriver_V4.3.0.17.exe 驱动下载
安装完驱动后设备管理器识别到设备
 安装完之后继续下载openNI开发包并且解压。OpenNI_v2.3.0.85_20220615_1b09bbfd_windows_x64_x86_release:
安装完之后继续下载openNI开发包并且解压。OpenNI_v2.3.0.85_20220615_1b09bbfd_windows_x64_x86_release:
下载openNI
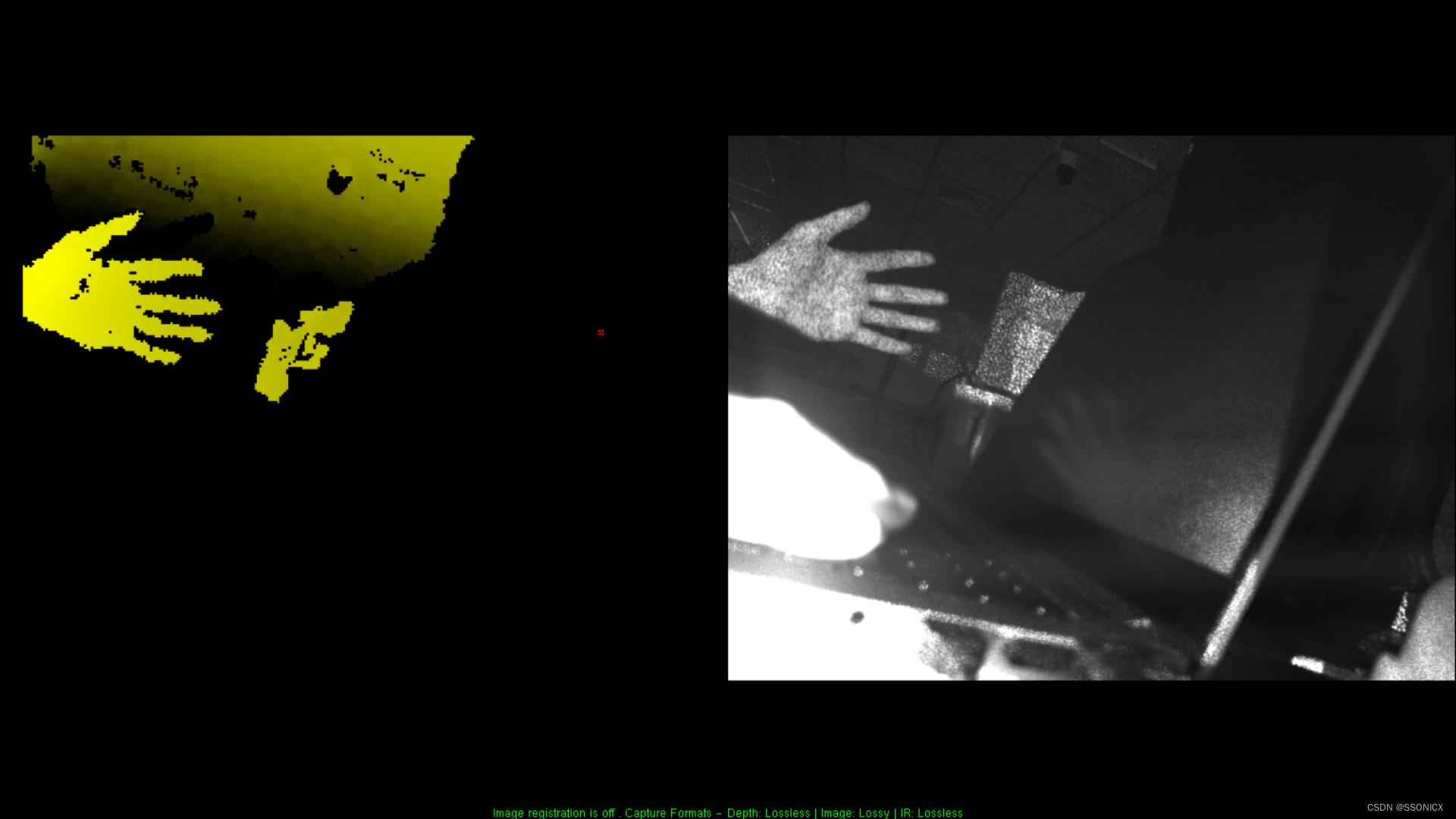
 打开NiViewer.exe就能查看摄像头的信息
打开NiViewer.exe就能查看摄像头的信息


















 2471
2471

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











