







概述
本文档介绍 [1] 中规定的 AUTOSAR BSW 模块 BswM 的功能、API 和配置。
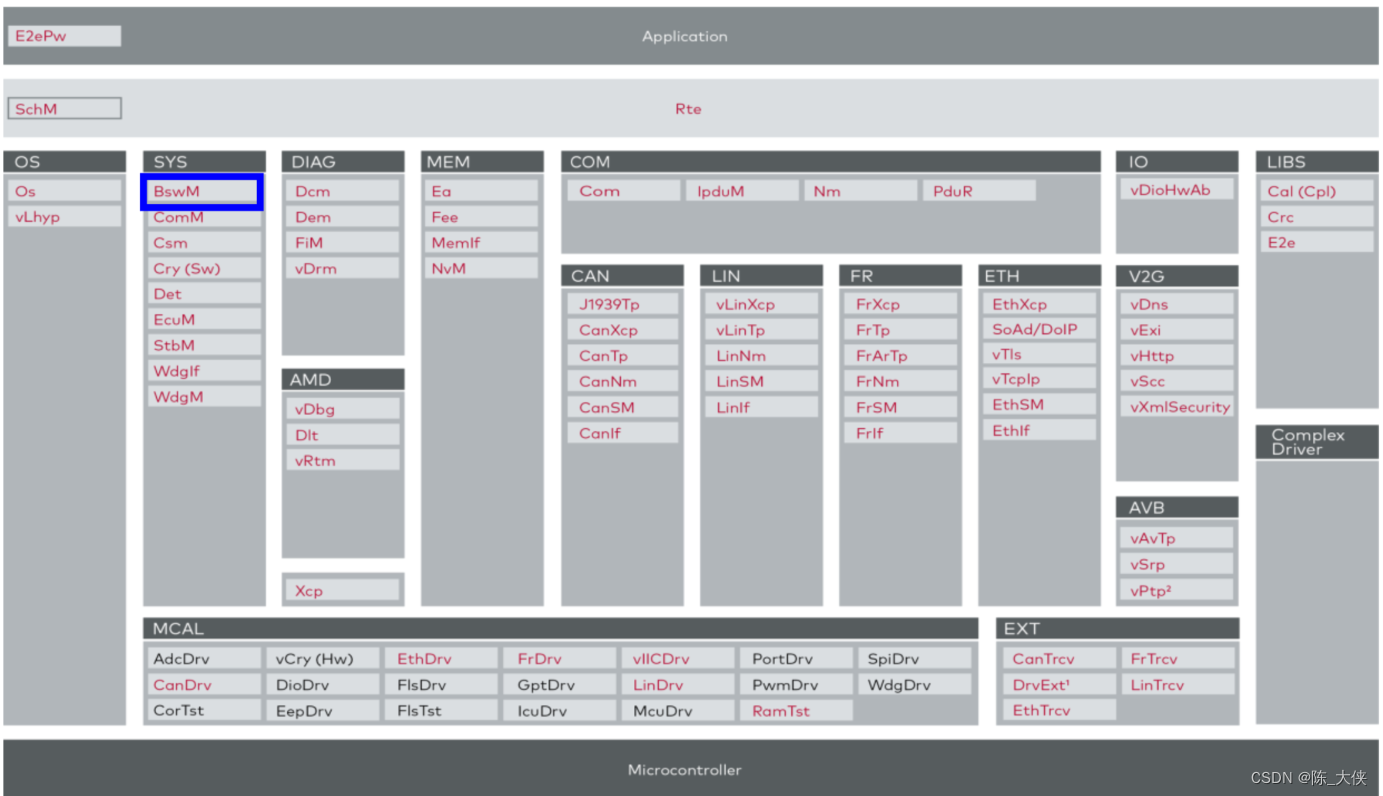
架构概览
下图显示了 BswM 在 AUTOSAR 架构中的位置。
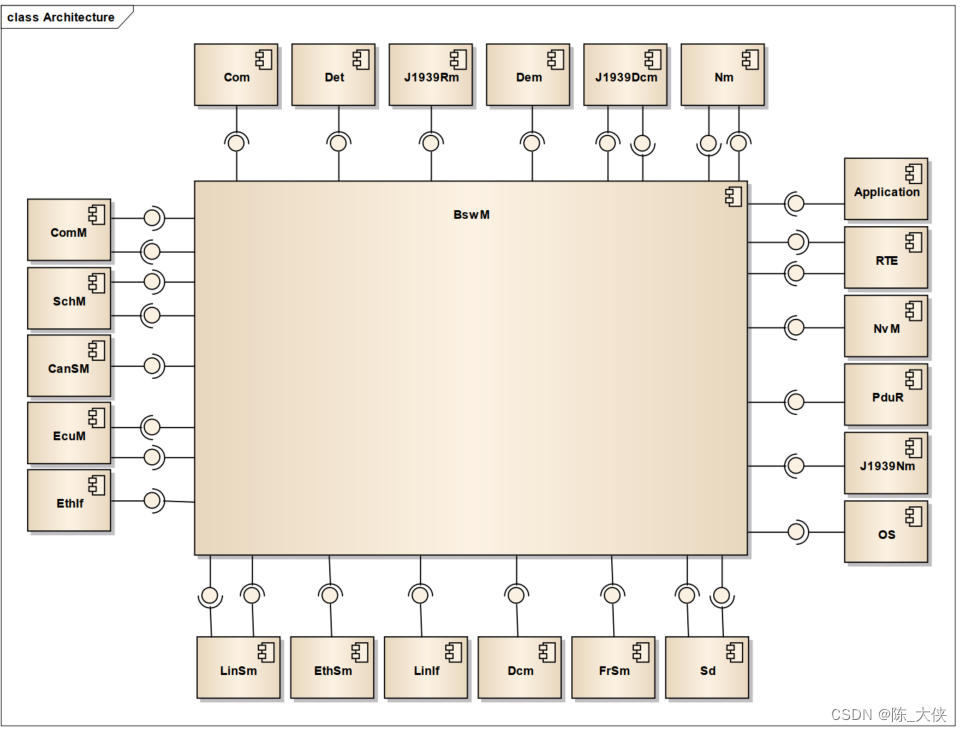
下图显示了 BswM 相邻模块的接口。这些接口将在API 接口章节中介绍。
3 功能说明
本章介绍 BswM 的一般功能。
3.1 特点
下表列出的功能涵盖了为 BswM 规定的全部功能。
AUTOSAR 标准功能作了规定。表中列出了相应的功能:
3.1.1 AUTOSAR 标准功能
- CanSM 模式仲裁
- ComM 模式仲裁
- DcM模式仲裁
- EcuM 模式仲裁
- EthSM 模式仲裁
- FrSM 模式仲裁
- J1939Dcm 模式仲裁
- J1939Nm 模式仲裁
- LinSM 模式仲裁
- LinTp 模式仲裁
- NvM 模式仲裁
- Sd 模式仲裁
- Application模式仲裁
- I-PDU 组处理(激活/停用/监测)
- 处理 PduR 路由的操作
- 嵌套规则执行
- Rte 模式通知和开关
- Rte 模式请求接口
- 看门狗管理
- 构建后处理
- 预编译配置多分区
3.1.2 扩展功能
- 计时器作为模式请求接口
- Nm 作为模式请求接口
- 用户条件作为模式请求接口
- 通用模式开关作为Action
- 计时器控制作为Action
- 用户可操作BswM_Callout_Stub.c
- 预配置状态机(通信、初始化、服务和 ECU 状态处理)
- 即时模式请求接口初始化规则的仲裁
- 模式规则控制 Action List 优先级控制
- 支持 ASR3 IPduGroup APIS
- PduR 模式请求端口 EthIf
- 模式仲裁
- 同步初始Action List
3.2 初始化
BswM 通过服务函数 BswM_Init 进行初始化。注意:在启动代码未将随机存取存储器 (RAM) 初始化为零的平台上,必须首先调用函数 BswM_InitMemory,然后才能调用 BswM_Init。所有可用模式都被设置为配置的初始化状态,该状态可以是未定义的,也可以设置为特定值。如果初始化状态未定义,则在首次出现模式请求/指示函数之前,不会对模式进行仲裁。
3.3 状态机
图 3-1 中的状态机图显示了 BswM 的一般处理过程。每个状态描述如下:
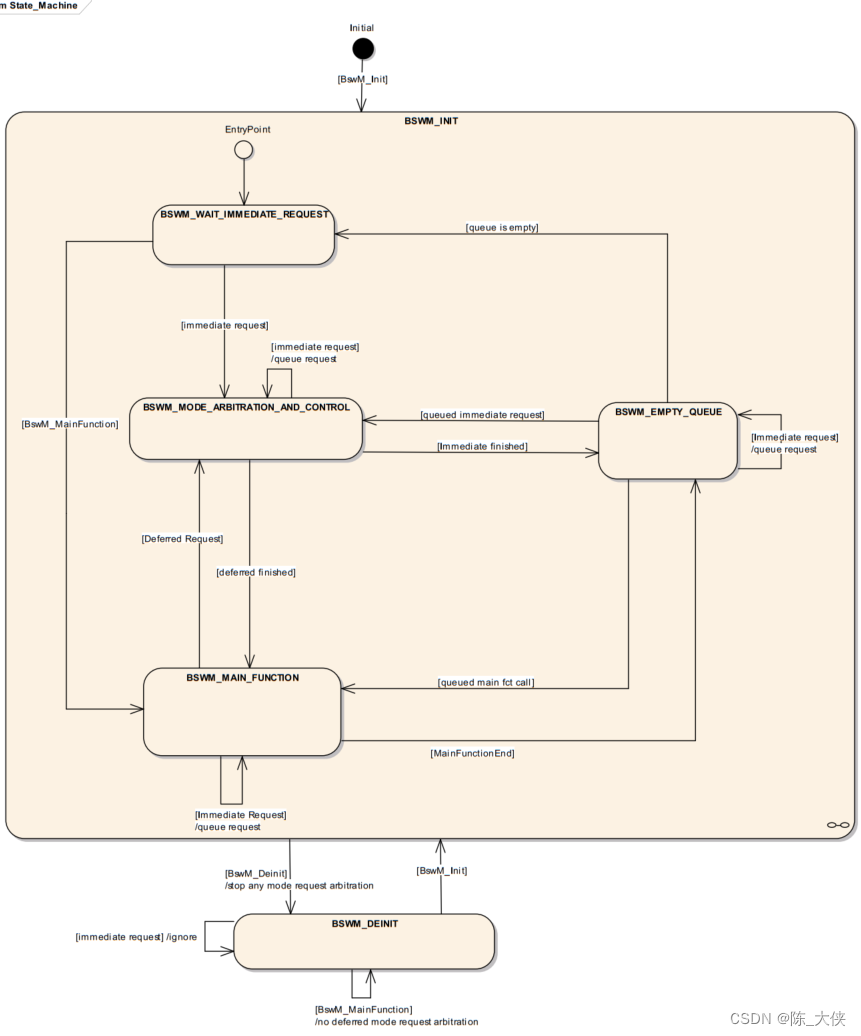
BSWM_INIT
BswM 已初始化并准备好接收即时模式仲裁请求。延迟模式仲裁在循环调用的函数 BswM_MainFunction 中完成。
bswm_wait_immediate_request
在此状态下,BswM 等待模式仲裁请求。如果请求立即进行模式仲裁或调用 BswM_MainFunction 时,该状态将被解除。
bswm_main_function
调用 BswM_MainFunction 时将进入这种状态。在 BswM_MainFunction 中完成延迟模式仲裁。在 BswM_MainFunction 执行期间出现的立即模式仲裁请求将被排队,并在 BswM_MainFunction 结束时执行,此时所有延迟模式仲裁和控制均已完成。强制立即 "类型的模式仲裁请求不会排队,并且会中断延迟模式仲裁。
bswm_mode_arbitration_and_control
在此状态下,将完成已配置的模式规则仲裁,并执行真/假动作列表。类型为 "立即 "的新模式仲裁请求将被排队,类型为 "强制立即 "的仲裁请求将立即进行仲裁。
bswm_empty_queue
在此状态下,执行队列模式仲裁请求。
BSWM_DEINIT
调用函数 BswM_Deinit 时进入该状态。不接受模式仲裁请求,也不进行模式处理。只有在调用函数 BswM_Init 时才能离开该状态。
3.4 模式管理
BswM 管理用户定义的模式,其行为完全由配置定义。模式由以下部分组成
Mode Source: 这是模式仲裁的触发器,触发器可以是应用程序指示/请求函数或 BSW 指示/请求函数或 BswM_MainFunction()。
Mode Arbitration: 当模式源触发发生时,BswM 将在 BswM_MainFunction() 内立即或延迟仲裁特定模式规则。模式仲裁类型在第 3.4.1 和 3.4.3 章中有详细描述。
Mode Rule: 规则是一个逻辑布尔表达式,由使用不同运算符的特定条件组成。规则由 BswM 判定为 "真 "或 “假”。根据评估结果,BswM 执行配置的模式操作(真操作或假操作)。
Mode Actions: 这些操作包括 BSW 服务函数调用、用户调用函数调用或对嵌套规则或操作列表的调用,由 BswM 在模式仲裁后执行。
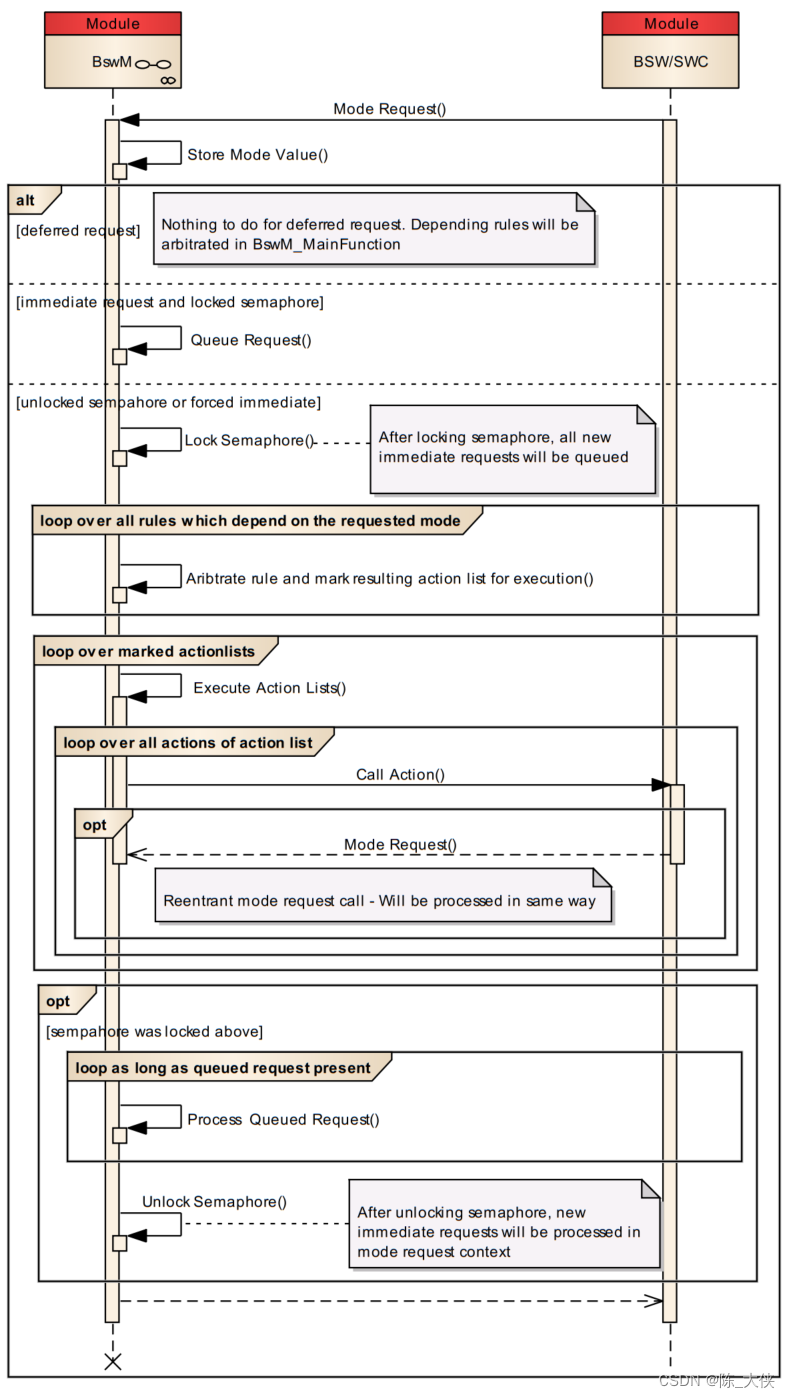
3.4.1 即时模式处理
即时模式仲裁直接根据模式请求/指示功能进行。如果在模式仲裁期间出现另一个模式请求/指示,BswM 会将该模式仲裁请求排入队列。当前模式仲裁结束后,模式请求队列将清空。图 3-2 中的顺序图显示了这一过程。
3.4.2 强制即时模式处理
强制立即模式仲裁直接在模式请求/指示函数中进行。强制立即请求会触发立即模式仲裁,中断主函数中的任何其他立即模式仲裁或延迟规则处理。此类模式处理不排队。
3.4.3 延迟模式处理
延迟模式仲裁在 BswM_MainFunction() 的执行过程中循环进行。如果在模式仲裁期间出现另一个模式请求/指示,BswM 会将该模式仲裁请求排入队列。模式请求队列将在 BswM_MainFunction() 结束时清空。图 3-3 中的序列图显示了这一过程。
3.5 Action List
Action List是在规则仲裁阶段之后进行的。是否执行操作列表取决于仲裁结果(True or False)。根据规则评估结果执行操作列表有两种方式:一种是每次评估规则并得出相应结果时执行(条件执行),另一种是仅在评估结果与上次评估结果相比发生变化时执行(触发执行)。这种执行类型通过配置来定义。如果对规则的仲裁会导致执行一个操作列表,那么该操作列表就会被标记为要执行。所有被标记的操作列表都会在规则仲裁后按其优先级执行。
3.6 错误处理
3.6.1 开发错误上报/Det
默认情况下,如果启用了Det功能(即预编译参数 BSWM_DEV_ERROR_DETECT==STD_ON),则会使用 [3] 中指定的 Det_ReportError() 服务向 DET 报告开发错误。
如果使用其他模块进行开发错误报告,则报告错误的函数原型可由集成者配置,但必须与 Det_ReportError()服务具有相同的签名。
报告的 BswM ID 为 42。一般Det 的服务标识和错误码可在BswM.h查看。
4 集成
本章提供了将 Vector MICROSAR BswM 集成到 ECU 应用环境中的必要信息, 其他的AUTOSAR 代码包集成内容也可参考。
4.1 交付范围
交付的 BswM 包含 4.1.1 和 4.1.2 章所述的文件:
4.1.1 静态文件
文件名称 源代码交付 对象代码交付 说明
BswM.c 这是 BswM 的源文件。它包含初始化函数、去初始化函数、循环主函数和所有 BSW 模式指示函数。
BswM.h 这是 BswM 的头文件。它包含 BswM API 函数的接口。
BswM_CanSM.h 该头文件包含 CAN 状态管理器回调函数的原型。
BswM_ComM.h 该头文件包含通信管理器回调函数的原型。
BswM_Dcm.h 该头文件包含诊断通信管理器回调函数的原型。
BswM_EcuM.h 该头文件包含电子控制单元状态管理器的回调函数原型。
BswM_EthSm.h 该头文件包含以太网状态管理器回调函数的原型。
BswM_FrSM.h 该头文件包含 FlexRay 状态管理器回调函数的原型。
BswM_J1939Dc m.h 该头文件包含 J1939Dcm 模块回调函数的原型。
BswM_J1939Nm.h 该头文件包含 J1939Nm 模块回调函数的原型。
BswM_LinSM.h 该头文件包含 LIN 状态管理器回调函数的原型。
BswM_LinTp.h 该头文件包含 LIN 传输协议的回调函数原型。
BswM_Nm.h 该头文件包含网络管理器回调函数的原型。
BswM_NvM.h 该头文件包含非易失性随机存取存储器管理器的回调函数原型。
BswM_PduR.h 该头文件包含 Pdu 路由器模块回调函数的原型。
BswM_Sd.h 该头文件包含服务发现模块回调函数的原型。
BswM_WdgM.h 该头文件包含看门狗管理器模块的回调函数原型。
4.1.2 动态配置文件
动态文件由配置工具生成。
BswM_Lcfg.c 该文件包含预编译和编译后变体的配置参数。
BswM_Cfg.h 该头文件包含编译前和编译后变量的一般定义和配置定义。
BswM_Private_ Cfg.h 该文件包含必要的包含项以及 BswM 使用的库和变量的声明。
BswM_PBcfg.c 该文件包含用于编译后变量模式仲裁的变量。
BswM_Callout_ Stubs.c 该文件包含已配置创建的回调函数的定义。
4.2 其他软件模块的初始化
BswM 可通过用户调用函数初始化软件组件。BswM 可在 EcuM 完成其 “后操作系统序列”(其中初始化操作系统、时间表管理器和 BswM)后实现初始化。
4.2.1 使用基本编辑器
为了配置 BswM 以初始化其他模块:
• 创建 "用户调用 "类型的 “操作”,其中包含初始化功能。
• 创建一个 “操作列表”,其中包含前面提到的 "用户呼出 "操作。
• 单击容器 “BswMModeControl”,使 "Init Action List Reference(初始动作列表参考)"可见。
• 为包含其他模块初始化调用的操作列表添加引用。
• 这些操作将在 BswM_Init 结束时调用。
模式管理指南》[2] 中列举了一系列初始化功能(如欲了解更多模式管理信息,请参阅该指南)。请注意,该列表并不完整,取决于您交付的 BSW 模块。
初始化访问 NVRAM 的基本驱动程序:
Spi_Init(NULL_PTR); Eep_Init(NULL_PTR); Fls_Init(NULL_PTR); NvM_Init(NULL_PTR); NvM_ReadAll();
NvM_ReadAll() 任务完成后,其余模块的初始化工作将继续进行:
Can_Init(NULL_PTR); CanIf_Init(NULL_PTR); CanSM_Init(NULL_PTR); CanTp_Init(NULL_PTR); Lin_Init(NULL_PTR); LinIf_Init(NULL_PTR); LinSM_Init(NULL_PTR); LinTp_Init(NULL_PTR); Fr_Init(NULL_PTR);FrIf_Init(NULL_PTR); FrSm_Init(NULL_PTR); FrTp_Init(NULL_PTR); StbM_Init(); PduR_Init(NULL_PTR); CanNm_Init(NULL_PTR); LinNM_Init(NULL_PTR); FrNm_Init(NULL_PTR); Nm_Init(NULL_PTR);IpduM_Init(NULL_PTR); Com_Init(NULL_PTR); ComM_Init(NULL_PTR); Dcm_Init(NULL_PTR); Dem_Init(NULL_PTR); RteStart();
请注意,在 "构建后 "变体中,之前的初始化函数可能包含 "构建后 "特定参数。详细信息请参见文档 [7],"BSW 模块初始化 "一章:BSW 模块初始化,其中总结了初始化构建后可加载 BSW 模块所需的步骤。
4.2.2 使用可视化配置
为方便配置其他模块的初始化,可使用 “自动配置:模块初始化”。更多信息请参见第 4.3 和 4.3.1 章。
4.3 支持预配置状态机(自动配置)
BswM 支持预配置状态机。这些状态机的内容基于当前配置。用户可以激活和修改这些状态机。它们可以在 DaVinci Configurator 5 Pro 的 "模式管理 "视图中找到。使用自动配置的状态机:
- 在配置编辑器中点击 “模式管理”。
- 打开 "BSW 管理 "窗口。
- 单击 “自动配置:<状态机名称>”。
- 点击 "配置模块初始化 "链接开始配置。
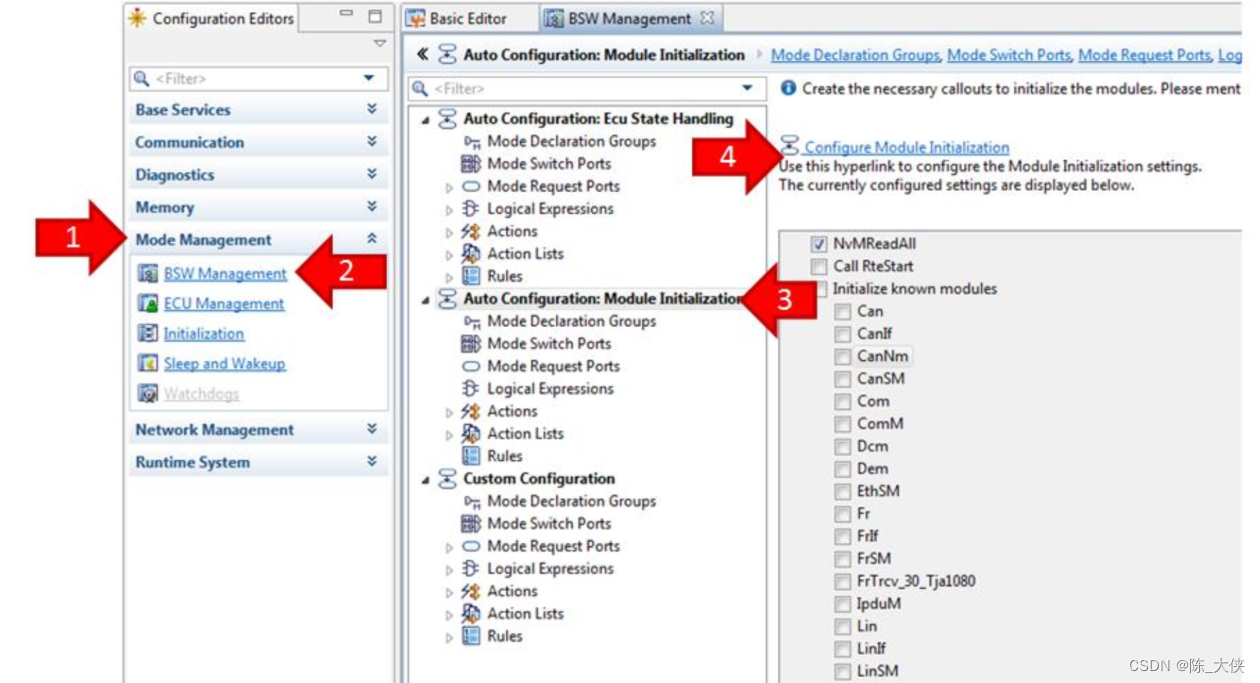
图 4-1 自动配置状态机
4.3.1 初始化
BswM 知道如何初始化多个模块:调用哪个函数、使用哪些参数以及包含哪些头文件。这些模块列在 "已知模块 "列表中。不过,预配置的初始化函数和包含的头文件可以由用户更改/调整。
外部模块 "列表包含 BswM 未知的模块。建议使用初始化函数和包含头,但有必要确保预配置参数的正确性,并在必要时对其进行调整。默认情况下,外部模块将在已知模块之后初始化。
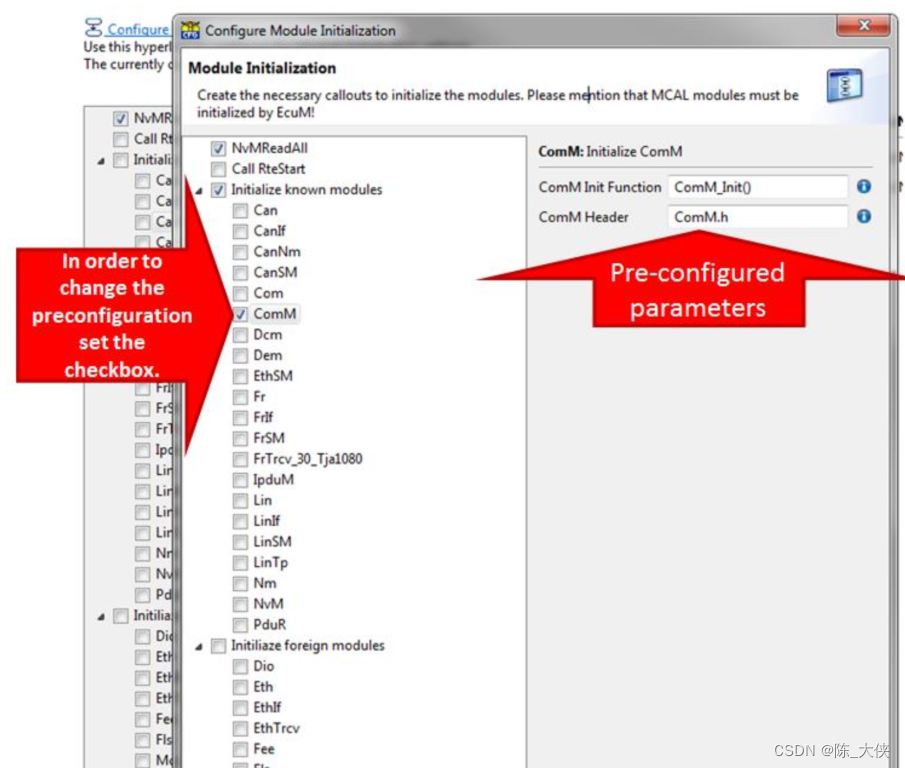
图 4-2 配置模块初始化
模块列表按字母顺序排列。但初始化函数调用是根据生成器的内部逻辑生成的。要查看函数生成的实际顺序,请点击自动配置:模块初始化 -> 操作列表-> INIT_AL_Initialize。
项目列表按生成顺序显示。项目顺序可以手动更改。
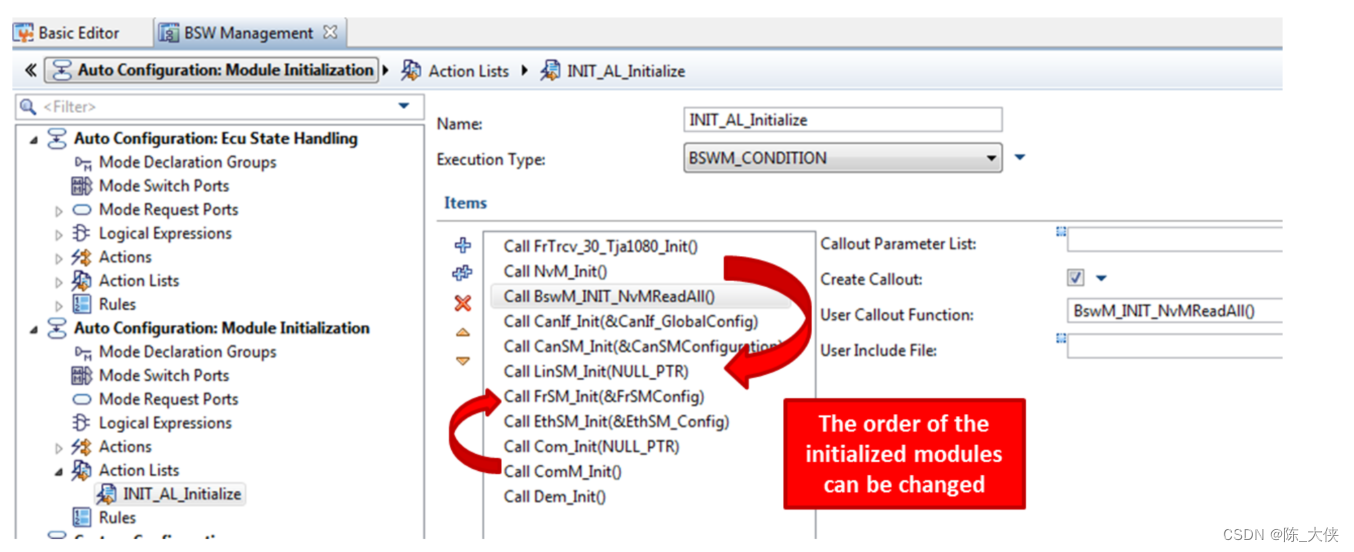
图 4-3 编辑初始化顺序
如果再次通过配置窗口编辑模块初始化,将恢复默认的项目顺序,之前对操作列表项目顺序所做的更改也将丢失。
为避免更改已编辑的操作列表项顺序,有必要在重新配置时清除 "恢复默认顺序 "复选框。
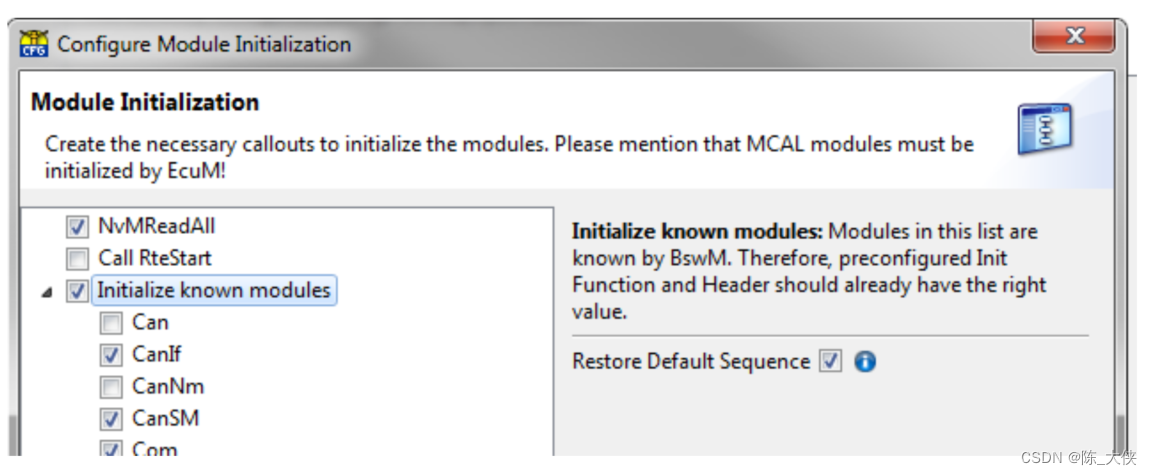
图 4-4 恢复默认序列
4.3.2 ECU 状态处理
BswM 可以创建启动和关闭 ECU 的规则和操作。这种行为类似于 ASR 3 中的 EcuM。
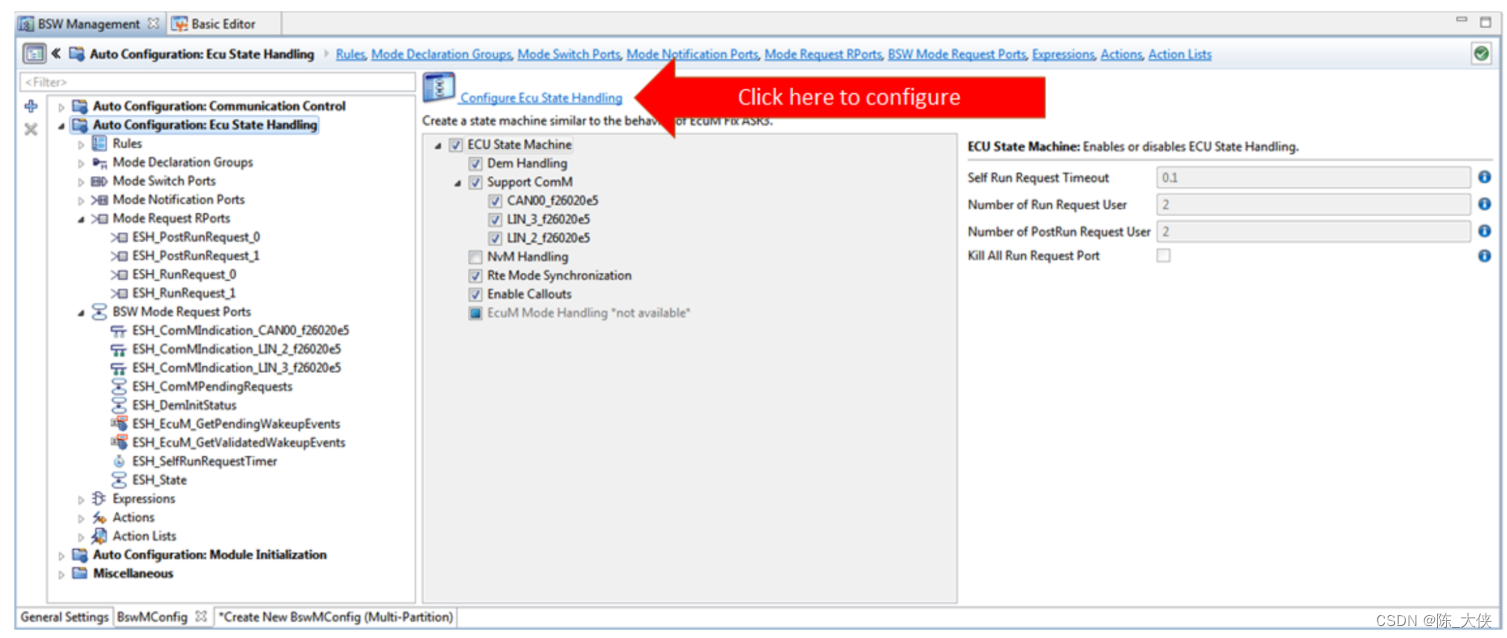
图 4-5 ECU 状态处理功能配置
可以激活以下功能:DEM 初始化和shut-down 接口生成、启用和禁用 ComM 通信、激活 NvM 处理、启用 RTE 模式更改通知和call out 使能。
此外,还可以配置请求运行请求和运行后请求的用户数量,以及状态机处于运行模式状态的时间段。
一般情况下,可以选择配置 “关闭所有运行请求端口”,通过该 SWC 模式请求端口,可以在不考虑任何运行/运行后用户、运行请求计时器或通道状态的情况下强制关闭。
ECU 状态处理的状态机如图 4-6 所示。如果启用同步,状态将通知 RTE。
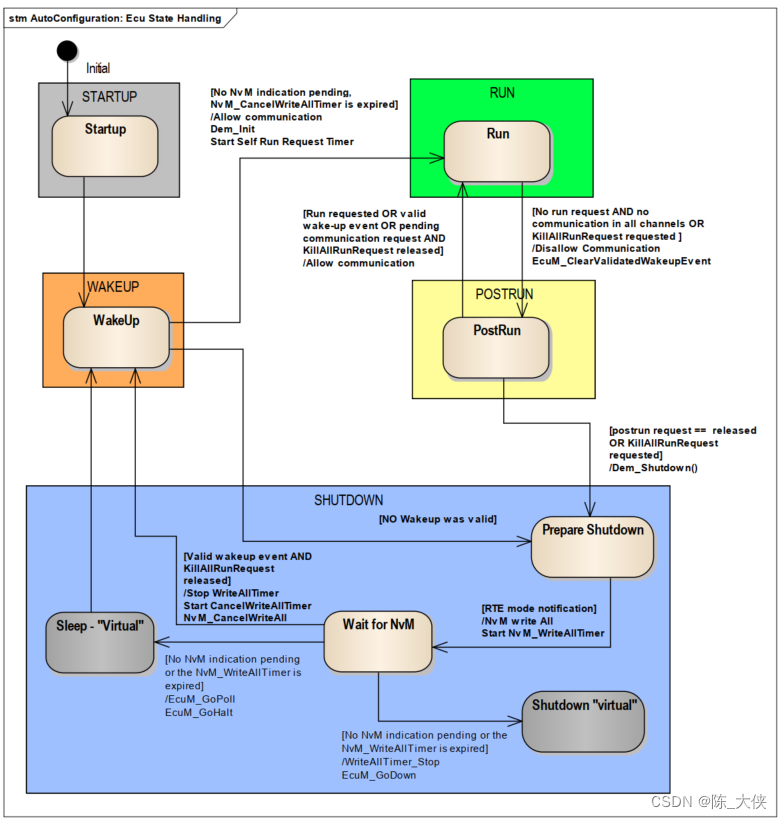 图 4-6 ECU 状态处理状态机
图 4-6 ECU 状态处理状态机
4.3.3 通信控制
BswM 可以创建启动和停止 ECU 通信的规则和操作。
通信控制自动配置支持的功能有
只要 I-PDU 只属于一个通道,就可配置 CAN、ETH、LIN、FR 和 J1939 的 I-PDU 组切换。
• 如果 I-PDU 组中有来自不同通道的 I-PDU,则会显示为 “不可用”,必须手动完成配置。
可以重新初始化传输 (TX) 和接收 (RX) I-PDU。
• 对于 CAN,只有在总线状态从 "NO_COM "转换为 "FULL_COM "时才会执行重新初始化,而在总线状态为 "BUS_OFF "或 "SILENT "时则不会执行重新初始化。
启用和禁用 CAN、ETH 和 FlexRay 总线的 NM(如果该通道存在 NM)。
在切换属于 CAN、ETH 或 FlexRay 总线的 I-PDU 组时考虑 DCM 模式。
在切换属于 CAN 总线的 TX I-PDU 组时,考虑所选的 Nm 状态。
支持 CAN、ETH 和 FlexRay 总线的部分联网 (PNC) 配置。
• 如果 I-PDU 组可分配给 PNC,则 I-PDU 组会被列为相应 PNC 的子功能,并根据 PNC 状态打开或关闭。
• 考虑到只有在系统描述中有 PNC 映射条目时才能确定 PCN。
配置 J1939 模块。
• 将配置标准规则,在规则条件中考虑 J1939Nm 的状态。作为操作列表,模块 J1939Dcm 和 J1939Rm 的状态将被设置。
• 只包含同一节点 I-PDU 的 I-PDU 组将根据节点状态打开或关闭。
• 被确定为广播组的 I-PDU 组将根据 Dcm 广播状态打开或关闭。
• 根据信道和节点状态,启用和禁用 PduR 中的路由-管道
切换 LIN I-PDU 组。
• 只包含相同计划表 I-PDU 的 I-PDU 组将根据计划表状态打开或关闭。
• 设置起始时间表表。
4.3.4 服务控制
BswM 能够创建必要的端口,以控制应用程序的服务发现。
自动配置只有在 Sd 模块处于当前配置中时才可用,支持以下功能:
为每个选定的 SdClientService、SdEventHandler 或 SdConsumedEventGroup 创建一个 BswMSwitchPort(P- 端口),以便向应用程序提供其状态。
为每个选定的 SdClientService、SdServerService 或 SdConsumedEventGroup 创建一个 BswMSwcModeRequest (R-Port),以捕捉来自应用程序的请求并将其转发给 Sd。
4.4 关键部分
BswM 的代码段不得被传入的模式请求打断。因此,BswM 使用一个需要全局中断锁的独占区域:
bswm_exclusive_area_0 使用 BswM 提供模式指示的 BSW 模块的主要功能不应相互干扰。
4.5 周期Task
BswM 有一个循环主函数 BswM_MainFunction(),如果存在延迟模式请求端口、使用定时器或配置了 RTE 模式切换操作,则必须循环调用该函数。循环时间由用户决定,但必须考虑到延迟模式处理。
4.6 NvM - BswM 配置
在 BswM 中配置 NvM 请求端口时,必须勾选 NvM 常规配置中的必要复选框。
在 NvMCommon 中勾选复选框:“多区块任务状态信息” 在 NVMConfigBlock 中勾选 "区块状态信息 "复选框
5 API 描述
接口概览请参见图 2-2。
5.1 类型定义
本章将介绍 BswM 所定义的类型。
类型名称 C 型 说明 数值范围
BswM_ConfigType 在 BswM 初始化过程中用于生成后配置的指针, 在预编译时不使用。
BswM_ModeType uint16 确定 BswM 用户可申请的模式的数据类型 0 … 65535
在模式总数大于 255 时使用。
BswM_UserType uint16 标识向 BswM 发送模式请求的 BswM 用户的数据类型。 0 … 65535
用户总数大于 255 时使用。
BswM_HandleType uint8 / uint16 用于操作列表和规则 ID 的数据类型。 0 … 65535
取决于行动列表和规则的数量。
5.2 BswM 提供的服务
5.2.1 BswM_InitMemory
原型
void BswM_InitMemory (void)
参数
无 -
返回代码
空白 -
功能说明
在未使用初始化启动代码的情况下,初始化 BSW 模式管理器模块变量。该函数将 BswM 设置为未初始化状态。
特殊性和局限性
如果使用该函数,则应在启动后在任何其他 BSWM 函数之前调用。
该功能为同步功能。
该功能无反跳功能。
呼叫背景
该函数可从任务上下文中调用。
5.2.2 BswM_Init
原型
void BswM_Init (const BswM_ConfigType *ConfigPtr)
参数
ConfigPtr 指向编译后配置数据的指针。对于编译前的情况,应使用 NULL 指针。
返回代码
空白 -
功能说明
初始化 BSW 模式管理器。
特殊性和局限性
该功能为同步功能。
该功能无反跳功能。
每个分区都必须调用该函数。
呼叫背景
该函数可从任务上下文中调用。
5.2.3 BswM_Deinit
原型
void BswM_Deinit (void)
参数
无 -
返回代码
空白 -
功能说明
对 BSW 模式管理器进行去初始化。所有待处理的请求将被清除,BswM 不再接受任何模式请求。只有调用 BswM_Init()函数才能退出该状态。
特殊性和局限性
该功能为同步功能。
该功能无反跳功能。
呼叫背景
该函数可从任务上下文中调用。
5.2.4 BswM_GetVersionInfo
原型
void BswM_GetVersionInfo (Std_VersionInfoType *VersionInfo)
参数
版本信息 指向版本信息应复制到的地址的指针。
返回代码
空白 无
功能说明
返回该模块的版本信息。版本采用 BCD 编码。
特殊性和局限性
调用者必须确保在调用函数之前分配一个 Std_VersionInfoType 类型的变量。
该功能为同步功能。
该函数为可重入函数。
Call Context
该函数可在任务和中断上下文中调用。
5.2.5 BswM_RequestMode
原型
void BswM_RequestMode (BswM_UserType requesting_user.用户)
BswM_ModeType requested_mode)
参数
请求用户 请求模式的用户。
请求的模式 请求的模式。
返回代码
空白 -
功能说明
请求模式的通用函数调用。该函数只能用于没有特定模式请求接口的其他 BSW 模块和/或通用模式请求。
特殊性和局限性
该功能为同步功能。
该功能对不同用户具有可重入性。
该函数只允许应用程序用于通用模式请求。否则,应用程序不得使用此函数。
Call Context
该函数可在任务和中断上下文中调用。
5.2.6 BswM_ComM_CurrentMode
原型
void BswM_ComM_CurrentMode (NetworkHandleType Network.ComM_CurrentMode)
ComM_ModeType RequestedMode)
参数
网络 指示状态对应的 ComM 通信通道。
请求模式 ComM 通信通道的当前状态
返回代码
空白 -
功能说明
ComM 调用的函数,用于指示 ComM 信道的当前通信模式。
特殊性和局限性
该功能为同步功能。
对于不同的网络,该功能是可重入的。
只能由 ComM 调用。
Call Context
该函数可在任务和中断上下文中调用。
5.2.7 BswM_ComM_CurrentPNCMode
原型
void BswM_ComM_CurrentPNCMode (PNCHandleType PNC.CurrentPNCMode)
ComM_PncModeType RequestedMode)
参数
刚果国家警察 报告当前状态的 PNC 句柄。
请求模式 PNC 的当前模式。
返回代码
空白 -
功能说明
由 ComM 调用的函数,用于显示 PNC 的当前模式。
特殊性和局限性
该功能为同步功能。
对于不同的 PNC,该功能是可重入的。
只能由 ComM 调用。
Call Context
该函数可在任务和中断上下文中调用。
5.2.8 BswM_ComM_InitiateReset
原型
void BswM_ComM_InitiateReset (void)
参数
空白 -
返回代码
空白 -
功能说明
ComM 调用的功能,用于请求重置 ECU。
特殊性和局限性
该功能为同步功能。
只能由 ComM 调用。
Call Context
该函数可在任务和中断上下文中调用。
5.2.9 BswM_Dcm_ApplicationUpdated
原型
void BswM_Dcm_ApplicationUpdated (void)
参数
无 -
返回代码
空白 -
功能说明
DCM 调用的函数,用于通知 BswM 应用程序已更新。
特殊性和局限性
该功能为同步功能。
该函数为可重入函数。
只能由 DCM 调用。
Call Context
该函数可在任务和中断上下文中调用。
5.2.10 BswM_Dcm_CommunicationMode_CurrentState
原型
void BswM_Dcm_CommunicationMode_CurrentState
(NetworkHandleType 网络, Dcm_CommunicationModeType 请求模式)
参数
网络 诊断模式对应的通信通道。
请求模式 所请求的诊断通信模式。
返回代码
空白 -
功能说明
由 DCM 调用的函数,用于向 BswM 通报通信模式的当前状态。
特殊性和局限性
该功能为同步功能。
对于不同的网络,该功能是可重入的。
只能由 DCM 调用。
Call Context
该函数可在任务和中断上下文中调用。
5.2.11 BswM_CanSM_CurrentState
原型
void BswM_CanSM_CurrentState ( NetworkHandleType Network、
CanSM_BswMCurrentStateType CurrentState)
参数
网络 指示状态对应的 CAN 通道。
当前状态 CAN 通道的当前状态。
返回代码
空白 -
功能说明
CanSM 调用的函数,用于指示其当前状态。
特殊性和局限性
该功能为同步功能。
对于不同的网络,该功能是可重入的。
只能由 CanSM 调用。
Call Context
该函数可在任务和中断上下文中调用。
5.2.12 BswM_EthIf_PortGroupLinkStateChg
原型
void BswM_EthIf_PortGroupLinkStateChg ( EthIf_SwitchPortGroupIdxType)
PortGroupIdx、
EthTrcv_LinkStateType PortGroupState)
参数
端口组 IDx 以太网接口上下文中的端口组索引。
端口组状态 端口组的当前状态。
返回代码
空白 -
功能说明
EthIf 调用的函数,用于指示某个以太网交换机端口组的链路状态变化。
特殊性和局限性
该功能为同步功能。
对于不同的以太网端口组,该功能是可重入的。
只能由 EthIf 调用。
Call Context
该函数可在任务和中断上下文中调用。
5.2.13 BswM_EthSM_CurrentState
原型
void BswM_EthSM_CurrentState ( NetworkHandleType Network、
EthSM_NetworkModeStateType CurrentState)
参数
网络 指示状态对应的以太网通道。
当前状态 以太网通道的当前状态。
返回代码
空白 -
功能说明
EthSM 调用的函数,用于指示其当前状态。
特殊性和局限性
该功能为同步功能。
对于不同的网络,该功能是可重入的。
只能由 EthSM 调用。
Call Context
该函数可在任务和中断上下文中调用。
5.2.14 BswM_FrSM_CurrentState
原型
void BswM_FrSM_CurrentState ( NetworkHandleType Network、
FrSM_BswM_StateType CurrentState)
参数
网络 指示状态对应的 FlexRay 集群。
当前状态 FlexRay 集群的当前状态。
返回代码
空白 -
功能说明
FrSM 调用的函数,用于指示其当前状态。
特殊性和局限性
该功能为同步功能。
对于不同的网络,该功能是可重入的。
该函数只能由 FrSM 调用。
Call Context
该函数可在任务和中断上下文中调用。
5.2.15 BswM_J1939DcmBroadcastStatus
原型
void BswM_J1939DcmBroadcastStatus ( uint16 NetworkMask)
参数
网络掩码 掩码,每个可用网络包含一个比特。1:启用网络 0:禁用网络
返回代码
空白 -
功能说明
该 API 将告诉 BswM 可用网络的理想通信状态。该状态通常通过 COM I-PDU 组开关激活。
特殊性和局限性
该功能为同步功能。
该功能无反跳功能。
该函数只能由 J1939Dcm 调用。
Call Context
该函数可在任务和中断上下文中调用。
5.2.16 BswM_J1939Nm_StateChangeNotification
原型
void BswM_J1939Nm_StateChangeNotification ( NetworkHandleType Network、
uint8 Node, Nm_StateType NmState)
参数
网络 识别 J1939 通道。
节点 识别 J1939 节点
NmState J1939 节点的当前(新)状态
返回代码
空白 -
功能说明
状态更改后通知当前 J1939Nm 状态。
特殊性和局限性
该功能为同步功能。
对于不同的网络和节点组合,该函数是可重入的。
该函数只能由 J1939Nm 调用。
Call Context
该函数可在任务和中断上下文中调用。
5.2.17 BswM_LinSM_CurrentState
原型
void BswM_LinSM_CurrentState ( NetworkHandleType Network、
LinSM_ModeType CurrentState)
参数
网络 指示状态对应的 LIN 通道。
当前状态 LIN 通道的当前状态。
返回代码
空白 -
功能说明
LinSM 调用的函数,用于指示其当前状态。
特殊性和局限性
该功能为同步功能。
对于不同的网络,该功能是可重入的。
该函数只能由 LinSM 调用。
Call Context
该函数可在任务和中断上下文中调用。
5.2.18 BswM_LinSM_CurrentSchedule
原型
void BswM_LinSM_CurrentSchedule ( NetworkHandleType Network、
LinIf_SchHandleType CurrentSchedule)
参数
网络 所示时间表对应的 LIN 通道。
当前日程 LIN 通道当前活动的时间表表。
返回代码
空白 -
功能说明
由 LinSM 调用的函数,用于指示其当前时间表。
特殊性和局限性
该功能为同步功能。
对于不同的网络,该功能是可重入的。
该函数只能由 LinSM 调用。
Call Context
该函数可在任务和中断上下文中调用。
5.2.19 BswM_LinSM_ScheduleEndNotification
原型
void BswM_LinSM_ScheduleEndNotification (NetworkHandleType Network、
LinIf_SchHandleType Schedule)
参数
网络 所示时间表对应的 LIN 通道。
时间安排 已结束的 LIN 频道的节目表。
返回代码
空白 -
功能说明
LinSM 调用的通知计划结束的函数。
特殊性和局限性
该功能为同步功能。
对于不同的网络,该功能是可重入的。
该函数只能由 LinSM 调用。
Call Context
该函数可在任务和中断上下文中调用。
5.2.20 BswM_LinTp_RequestMode
原型
void BswM_LinTp_RequestMode ( NetworkHandleType Network、
LinTp_Mode LinTpRequestedMode)
参数
网络 LIN TP 模式请求对应的 LIN 通道。
LinTpRequestedMode 请求的 LIN TP 模式。
返回代码
空白 -
功能说明
LinTp 调用的函数,用于请求相应 LIN 通道的模式。LinTp_Mode 主要与应使用的 LIN 计划表相关。
特殊性和局限性
该功能为同步功能。
对于不同的网络,该功能是可重入的。
该函数只能由 LinTp 调用。
Call Context
该函数可在任务和中断上下文中调用。
5.2.21 BswM_EcuM_CurrentState
原型
void BswM_EcuM_CurrentState (EcuM_StateType CurrentState)
参数
当前状态 要求的 ECU 运行模式
返回代码
空白 -
功能说明
EcuM 调用的功能,用于显示当前的 ECU 运行模式。
特殊性和局限性
该功能为同步功能。
该功能无反跳功能。
只能由生态管理调用。
Call Context
该函数可在任务和中断上下文中调用。
5.2.22 BswM_EcuM_CurrentWakeup
原型
void BswM_EcuM_CurrentWakeup ( EcuM_WakeupSourceType source、
EcuM_WakeupStateType state)
参数
消息来源 状态发生变化的唤醒源。
国 唤醒源的新状态。
返回代码
空白 -
功能说明
EcuM 调用的函数,用于指示唤醒源的当前状态。
特殊性和局限性
该功能为同步功能。
对于不同的信号源,该函数是可重入的。
只能由生态管理调用。
Call Context
该函数可在任务和中断上下文中调用。
5.2.23 BswM_EcuM_RequestedState
原型
void BswM_ EcuM_RequestedState ( EcuM_StateType State、
EcuM_RunStatusType CurrentStatus)
参数
国家 EcuMFlex 请求的状态。
当前状态 运行请求协议的新结果。
返回代码
空白 -
功能说明
由 EcuM 调用的函数,用于指示运行请求协议状态的请求。
特殊性和局限性
该功能为同步功能。
该函数在不同状态下是可重入的。
只能由生态管理调用。
Call Context
该函数可在任务和中断上下文中调用。
5.2.24 BswM_MainFunction
原型
void BswM_MainFunction (void)
参数
无 -
返回代码
空白 -
功能说明
BswM 的主要功能。
特殊性和局限性
该功能为同步功能。
该功能无反跳功能。
该函数必须在 SchM [6] 配置的周期时间内调用。
Call Context
该函数可从任务上下文中调用。
5.2.25 BswM_NvM_CurrentBlockMode
原型
void BswM_NvM_CurrentBlockMode(NvM_BlockIdType Block、
NvM_RequestResultType CurrentBlockMode)
参数
街区 新 NvM 模式对应的区块。
当前区块模式 NvM 程序块的当前程序块模式。
返回代码
空白 -
功能说明
NvM 调用的函数,用于指示 NvM 块的当前块模式。
特殊性和局限性
该功能为同步功能。
该函数对不同区块具有可重入性。
该函数只能由 NvM 调用。
Call Context
该函数可在任务和中断上下文中调用。
5.2.26 BswM_NvM_CurrentJobMode
原型
void BswM_NvM_CurrentJobMode(uint8 ServiceId、
NvM_RequestResultType CurrentJobMode)
参数
服务标识 表示回调是指多块服务 NvM_ReadAll 还是 NvM_WriteAll。
当前工作模式 参数 ServiceId 所指示的多区块任务的当前状态。
返回代码
空白 -
功能说明
NvM 调用的函数,用于向 BswM 通报多区块任务的当前状态。
特殊性和局限性
该功能为同步功能。
对于不同的服务,该函数是可重入的。
该函数只能由 NvM 调用。
Call Context
该函数可在任务和中断上下文中调用。
5.2.27 BswM_PduR_RxIndication
原型
void BswM_PduR_RxIndication(PduIdType RxPduId、
const PduInfoType *PduInfoPtr)
参数
RxPduId 接收 PDU 的 PduR ID。
PduInfoPtr 指针,用于存储 PDU 的所有信息。当前实现中未使用。
返回代码
空白 -
功能说明
PduR 调用的函数,用于向 BswM 通报收到的 PDU。
特殊性和局限性
该功能为同步功能。
对于不属于同一配置端口的 RxPduId,该函数是可重入的。
该函数只能由 PduR 调用。
Call Context
该函数可在任务和中断上下文中调用。
5.2.28 BswM_PduR_TpRxIndication
原型
void BswM_PduR_TpRxIndication(PduIdType id, Std_ReturnType result)
参数
本我 接收 PDU 的 PduR ID。
结果 接收结果。当前执行中未使用。
返回代码
空白 -
功能说明
PduR 调用的功能,用于向 BswM 通报收到的 TP PDU。
特殊性和局限性
该功能为同步功能。
对于不属于同一配置端口的 id,该函数是可重入的。
该函数只能由 PduR 调用。
Call Context
该函数可在任务和中断上下文中调用。
5.2.29 BswM_PduR_TpStartOfReception
原型
void BswM_PduR_TpStartOfReception ( PduIdType id, PduInfoType *info, PduLengthType TpSduLength,PduLengthType *bufferSizePtr)
参数
本我 接收 PDU 的 PduR ID。
信息 指针,用于存储 PDU 的所有信息。当前实现中未使用。
TpSduLength 要接收的 I-PDU 的总长度。当前实现中未使用。
缓冲区大小 接收缓冲区指针。当前实现中未使用。
返回代码
空白 -
功能说明
PduR 调用的函数,用于通知 BswM 开始接收 TP PDU。
特殊性和局限性
该功能为同步功能。
对于不属于同一配置端口的 id,该函数是可重入的。
该函数只能由 PduR 调用。
Call Context
该函数可在任务和中断上下文中调用。
5.2.30 BswM_PduR_TpTxConfirmation
原型
void BswM_PduR_TpTxConfirmation(PduIdType id, Std_ReturnType result)
参数
本我 已发送 TP PDU 的 PduR ID。
结果 传输结果。当前执行中未使用。
返回代码
空白 -
功能说明
PduR 调用的函数,用于向 BswM 通报已发送的 TP PDU。
特殊性和局限性
该功能为同步功能。
对于不属于同一配置端口的 id,该函数是可重入的。
该函数只能由 PduR 调用。
Call Context
该函数可在任务和中断上下文中调用。
5.2.31 BswM_PduR_Transmit
原型
void BswM_PduR_Transmit( PduIdType id, const PduInfoType *PduInfoPtr)
参数
本我 要传输的 PDU 的 PduR ID。
PduInfoPtr 指针,用于存储 PDU 的所有信息。当前实现中未使用。
返回代码
空白 -
功能说明
PduR 调用的函数,用于向 BswM 通报 PDU 发送事件
特殊性和局限性
该功能为同步功能。
对于不属于同一配置端口的 id,该函数是可重入的。
该函数只能由 PduR 调用。
Call Context
该函数可在任务和中断上下文中调用。
5.2.32 BswM_PduR_TxConfirmation
void BswM_PduR_TxConfirmation( PduIdType TxPduId )
参数
TxPduId 发送 PDU 的 PduR ID。
返回代码
空白 -
功能说明
PduR 调用的函数,用于向 BswM 通报已发送的 PDU。
特殊性和局限性
该功能为同步功能。
对于不属于同一配置端口的 TxPduId,该函数是可重入的。
该函数只能由 PduR 调用。
Call Context
该函数可在任务和中断上下文中调用。
5.2.33 BswM_Sd_EventHandlerCurrentState
void BswM_Sd_EventHandlerCurrentState(uint16 SdEventHandlerHandleId, Sd_EventHandlerCurrentStateType EventHandlerStatus )
参数
SdEventHandlerHandleId 用于标识事件处理程序的 HandleId
事件处理状态 事件处理程序的状态
返回代码
空白 -
功能说明
服务发现调用的函数,用于指示事件处理程序的当前状态(请求/释放)。
特殊性和局限性
该功能为同步功能。
对于不同的句柄,该函数是可重入的。
该函数只能由 Sd 调用。
Call Context
该函数可在任务和中断上下文中调用。
5.2.34 BswM_Sd_ClientServiceCurrentState
原型
void BswM_Sd_ClientServiceCurrentState(uint16 SdClientServiceHandleId, Sd_ClientServiceCurrentStateType CurrentClientState)
参数
SdClientServiceHandleId 用于标识客户服务的 HandleId。
当前客户端状态 客户服务的当前状态。
返回代码
空白 -
功能说明
服务发现调用的函数,用于指示客户服务的当前状态(可用/已停用)。
特殊性和局限性
该功能为同步功能。
对于不同的句柄,该函数是可重入的。
该函数只能由 Sd 调用。
Call Context
该函数可在任务和中断上下文中调用。
5.2.35 BswM_Sd_ConsumedEventGroupCurrentState
原型
void BswM_Sd_ConsumedEventGroupCurrentState( uint16 SdConsumedEventGroupHandleId、
Sd_ConsumedEventGroupCurrentStateType ConsumedEventGroupState)
参数
SdConsumedEventGroupHandleId HandleId 用来标识消耗的事件组。
已消耗事件组状态 已消耗事件组的状态。
返回代码
空白 -
功能说明
服务发现调用的功能,用于显示已消耗事件组的当前状态(可用/已关闭)。
特殊性和局限性
该功能为同步功能。
对于不同的句柄,该函数是可重入的。
该函数只能由 Sd 调用。
Call Context
该函数可在任务和中断上下文中调用。
5.2.36 BswM_Nm_StateChangeNotification
原型
void BswM_Nm_StateChangeNotification(NetworkHandleType nmNetworkHandle、
Nm_StateType nmPreviousState, Nm_StateType nmCurrentState)
参数
nmNetworkHandle 识别 NM 通道
nmPreviousState NM 通道的先前状态(未使用的参数)
nmCurrentState NM 通道的当前(新)状态
返回代码
空白 -
功能说明
Nm 调用的函数,用于向 BswM 通报其当前状态。
特殊性和局限性
该功能为同步功能。
对于不同的网络,该功能是可重入的。
该函数只能由 Nm 调用。
Call Context
该函数可在任务和中断上下文中调用。
5.2.37 BswM_RuleControl
void BswM_RuleControl (BswM_HandleType ruleId, uint8 state)
参数
ruleId 应更改的规则的外部 ID。应使用符号名称定义。
国 新规则状态。以下值有效:禁用规则:bswm_deactivated
启用规则:BSWM_UNDEFINED、BSWM_TRUE 或 BSWM_FALSE
返回代码
空白 -
功能说明
为给定规则设置新状态,从而启用或禁用规则。
特殊性和局限性
该功能为同步功能。
对于不同的规则,该函数是可重入的。
该函数应由 BswM 的操作调用。
Call Context
该函数可在任务和中断上下文中调用。
5.2.38 BswM_WdgM_RequestPartitionReset
原型
void BswM_WdgM_RequestPartitionReset (ApplicationType Application)
参数
应用 新 NvM 模式对应的区块。
返回代码
空白 -
功能说明
WdgM 调用的函数,用于请求重置给定应用程序的相应分区。
特殊性和局限性
该功能为同步功能。
该函数为可重入函数。
该函数只能由 WdgM 调用。
Call Context
该函数可在任务和中断上下文中调用。
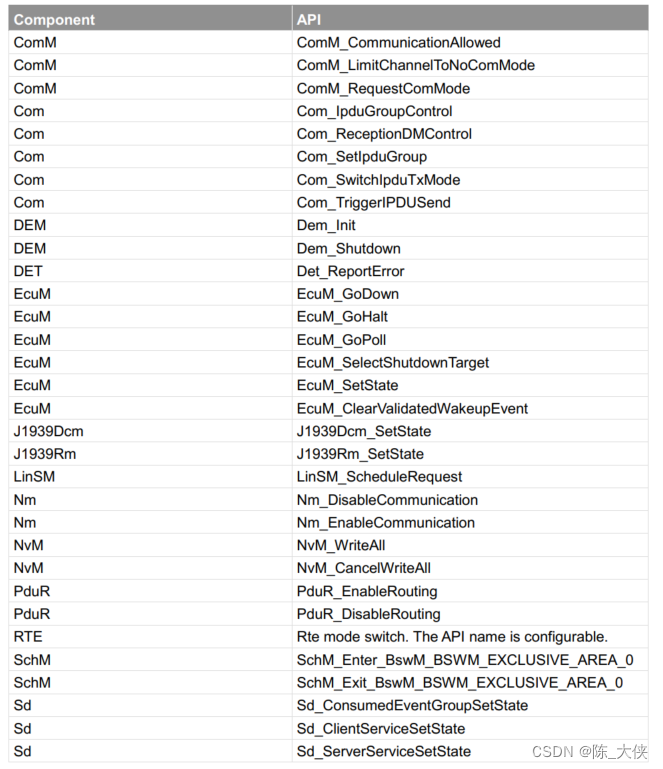
5.3 BswM 使用的服务
下表列出了 BswM 使用的其他组件提供的服务。有关原型和功能的详细信息,请参阅提供组件的文档。
5.4 回调函数
BswM 中没有回调函数。
5.5 可配置接口
5.5.1 呼出功能
用户调用函数可用作操作列表的一个项目。如果调用函数的声明已经存在,集成者必须通过用户包含文件提供该函数的外部声明。
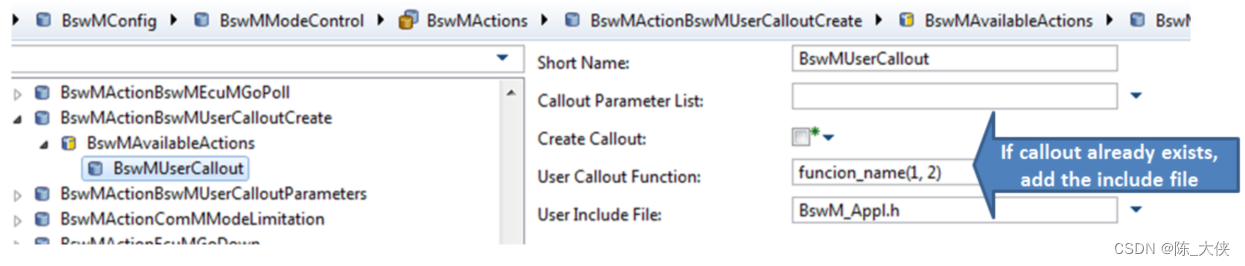
图 5-1 现有的Callout
如果 BswM 要生成用户呼出原型:则应设置 "创建呼出 "复选框,并在给定字段中以列表形式定义参数原型,列表以分号分隔。函数原型在 “BswM_Callout_Stubs.c” 中生成。
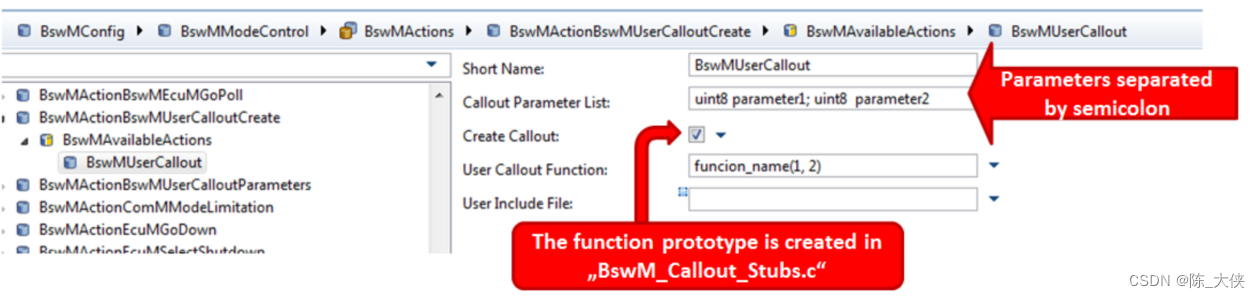
图 5-2 生成呼出函数原型
下表描述了 BswM 呼出函数的声明:
原型
void [Callout Function Name] ( )
参数
返回代码
功能说明
如果用户呼出被配置为操作列表的一个项目,则 BswM 会在相应规则的上下文中调用该功能。
特殊性和局限性
Call context
中断或任务上下文,取决于使用调用的模式/规则配置。
5.6 服务端口
BswM 有一个服务组件,它依赖于以下容器:
BswMSwcModeRequest
BswMSwcModeNotification
BswMSwitchPort
BswMModeDeclaration
下面几章将介绍这些容器。
5.6.1 BswMSwcModeRequest (R Port)
BswM 可以通过发送方-接收方模式端口(Require Port)接收模式。这可以通过使用 BswMSwcModeRequest 来实现。
BswMSwcModeRequest 有一个对模式声明组原型的引用和一个对 VARIABLE-DATA-PROTOTYPE 的实例引用。如果配置了对模式声明组原型的引用,就无法确定与发送方-接收方-接口的关系。因此,有必要创建一个新的发送方-接收方-接口。给定的 BswMModeRequestDataElementPrototypeName 将用作数据元素名称。
发送方-接收方-接口被命名为
BswM_SRI_{ 模式-交换机-接口名称}{ 模式-声明-组-原型名称}
如果使用 VARIABLE-DATA-PROTOTYPE 的实例引用,BswM 将重复使用现有的发送方-接收方接口。
在这两种情况下,创建的 Ports 都会被命名:
接收{BswMSwcModeRequest 的名称}。
5.6.2 BswMSwcModeNotification (R Port)
BswM 可以通过模式切换模式端口(Require Port)接收模式。这可以通过使用 BswMSwcModeNotification 来实现。
BswM 有一个模式声明组原型(Mode-Declaration-Group-Prototype)的引用。通过该原型可以确定一个模式-开关-接口,该接口将重新用于创建的端口。
创建的端口会被命名:
Notification_{ BswMSwcModeNotification 名称 }
5.6.3 BswMSwitchPort (P- Port)
BswM 可以通过模式切换模式端口(Provide Port)来切换模式。这可以通过使用 BswMSwitchPort 来实现。BswM 可以引用模式声明组原型。通过该原型可以确定一个模式切换接口,该接口将被重新用于创建的端口。
创建的端口会被命名:
交换机_{ BswMSwitchPort 名称 }
5.6.4 BswMRteModeRequestPort (P- Port)
BswM 可以通过发送方-接收方模式端口(Require Port)发送模式。这可以通过在 BswMRteModeRequest 操作中使用 BswMRteModeRequestPort 类型的端口来实现。BswM 使用 VARIABLE-DATA-PROTOTYPE 的实例引用(Instance-Reference),该实例引用代表已存在的发送方-接收方接口的数据元素。创建的 P 端口将使用该接口。
创建的端口会被命名:
Provide_{ BswMRteModeRequestPort 名称 }
5.6.5 BswMModeDeclaration
为方便 SWC 模式请求处理,BswM 可自行提供模式声明。为此,可以创建一个具有相应模式的 BswMModeDeclaration 容器。BswM SWC 验证会自动创建模式声明、相应的实现类型和带有模式声明组原型的模式开关接口。
模式切换接口已命名:
BswM_MSI_{BswMModeDeclaration 的名称}。
相应的模式-声明-组-原型已被命名:
BswM_MDGP_{BswmModeDeclaration 的名称}。实现类型已被命名:
BswM_{BswMModeDeclaration}的名称
















 914
914











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











