







1. 问题描述
单目视觉里程计是指通过确定视频帧之间的对应关系,来估拍摄图片时相机的位置和姿态,它被应用于自主车辆、医疗机器人和增强现实。然而,单目系统由于缺乏二维帧的深度信息而受到尺度模糊问题的困扰。尺度模糊导致了随着时间的推移而积累的尺度漂移问题(scale drift issue)。
2. 公式

图中公式意味着t和zi实际上在一个比例系数内都是有效的。由于对于VO系统,我们通常在有限的关键帧上进行局部优化以实现实时性能,这种尺度模糊性将导致对长轨迹的预测不一致。
3. 可视化
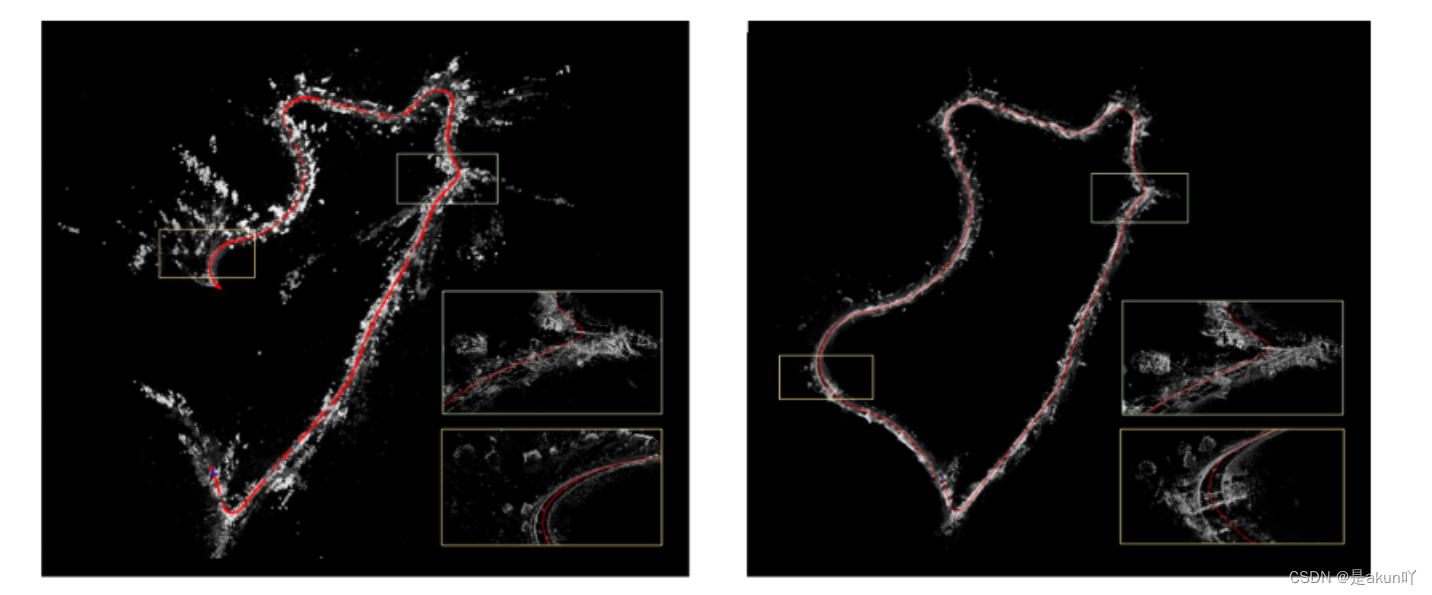
KITTI Seq.09提出了一个闭环轨迹。而DSO由于尺度漂移问题,未能闭环并产生噪声点云。
参考文献
Zhang, Sen, Jing Zhang, and Dacheng Tao. “Towards scale consistent monocular visual odometry by learning from the virtual world.” 2022 International Conference on Robotics and Automation (ICRA). IEEE, 2022.














 341
341











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









