







Microstrain
介绍
3DM-GX5特点:
- 极其稳定和低噪声的螺旋仪
- 实时测量监控和数据记录
指示灯:
- 关
- 快
- 慢
软件安装
- MIP Monitor 下载地址:https://www.microstrain.com/software
- 下载并打开MIP Monitor.zip文件
- 运行setup.exe
- 下载并打开interial_drivers文件,安装操作传感器所需的硬件驱动程序
- 运行.msi文件
- 下载Iron Caribration文件,以方便磁力计现场校准
- 运行setup.exe
条件
USB连接
MIP Monitor
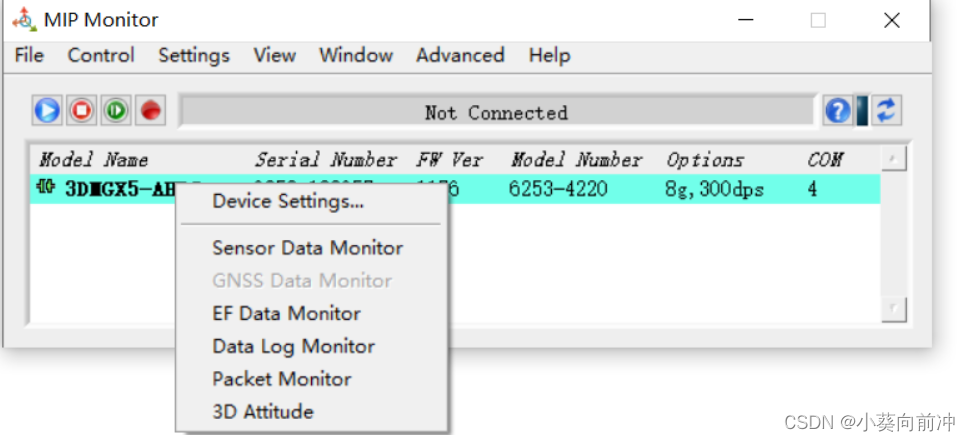
通过MIP Monitor软件接口建立通信:
- 检查传感器设备状态指示灯是否亮。
- 打开MIP Monitor软件。
- 当软件运行时,传感器会自动出现在设备列表中。
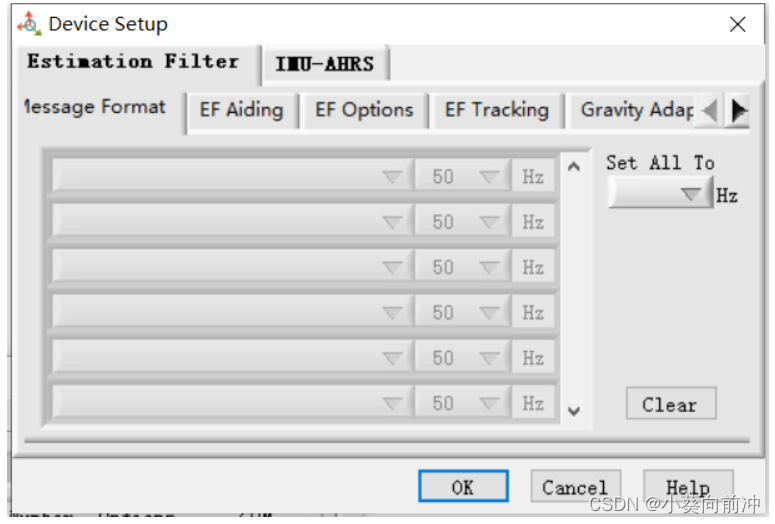
传感器设置:
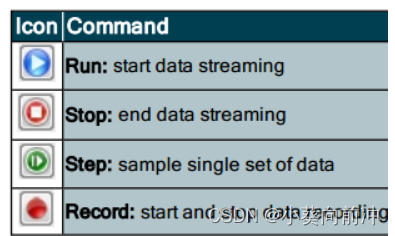
数据录取:
Record键:开始录制点击、结束也点击
ros驱动安装
建议安装直接从buildfarm通过运行以下命令那里 ROS_DISTRO 是的版本ROS您使用的诸如 noetic:
sudo apt-get update && sudo apt-get install ros-ROS_DISTRO-microstrain-inertial-driver
RQT:
sudo apt-get update && sudo apt-get install ros-ROS_DISTRO-microstrain-inertial-rqt
roslaunch microstrain_inertial_driver microstrain.launch
二进制安装的lord驱动默认启动launch的接口是/dev/ttyACM0/ ,如果接入设备查看接口是ttyUSB0,需要到config下修改params.yml
gedit /opt/ros/melodic/share/microstrain_inertial_driver/microstrain_inertial_driver_common/config/params.yml
sudo dmesg:dmesg 命令可以查看环形缓冲区中的消息。

数据录制
首先:
roslaunch microstrain_inertial_driver microstrain.launch
然后:
rosbag record -o microstrain.bag /imu/data output
查看录制数据信息:
rosbag info microstrain_2024-03-07-10-46-41.bag
imu_utils标定
- 首先将imu保持静止,录取数据2小时
- 标定imu
source ./devel/setup.bash (一定不要忘记这个哟)
roslaunch imu_utils A3.launch
- 回放录制数据:(这里要写你录制的包的路径,-r 后面的数大一些,就快一些)
rosbag play -r 200 imu_A3.bag
roslaunch file:
<launch>
<node pkg="imu_utils" type="imu_an" name="imu_an" output="screen">
<param name="imu_topic" type="string" value= "/imu、data/"/>
<param name="imu_name" type="string" value= "文件名"/>
<param name="data_save_path" type="string" value= "$(find imu_utils)/data/存放地址"/>
<param name="max_time_min" type="int" value= "120"/> #标定的时长,录制的数据比这个多20分钟最好
<param name="max_cluster" type="int" value= "100"/> #最好和播放的频率一样
</node>
</launch>
运行完之后,会在imu_utils/data文件夹下生产多个txt文件。
错误:
wait for imu data.
首先检查launch文件中的imu_topic是否与bag包中的topic一致。两种方法查看bag包中的topic name:
1.1 rosbag play XXXX.bag; 然后另开一个终端 rostopic list,检查输出的topic name;
1.2 rosbag info XXXX.bag; 会直接给出bag包里的信息,包括包的时长等信息;
根据时长信息修改launch文件里的max_time_min参数值
tips:
-
先在两个terminal将rosbag play 和roslaunch 指令写好
-
先执行roslaunch
-
然后先执行rosbag play
rosbag 提取串口数据
查看话题订阅:
rostopic list
运行推送:
catkin_make
source devel/setup.bash
rosrun imu_test imu_pub
查看话题:
rostopic echo /imu_raw_data















 395
395











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









