






Isaac Sim 是一个从头开始构建的软件平台,旨在支持 日益机器人化和自动化的世界。目标是尽可能简化 您可以为真实的物理机器人设计、调整、训练和部署自主控制代理。
Isaac Sim的配置要求如图:
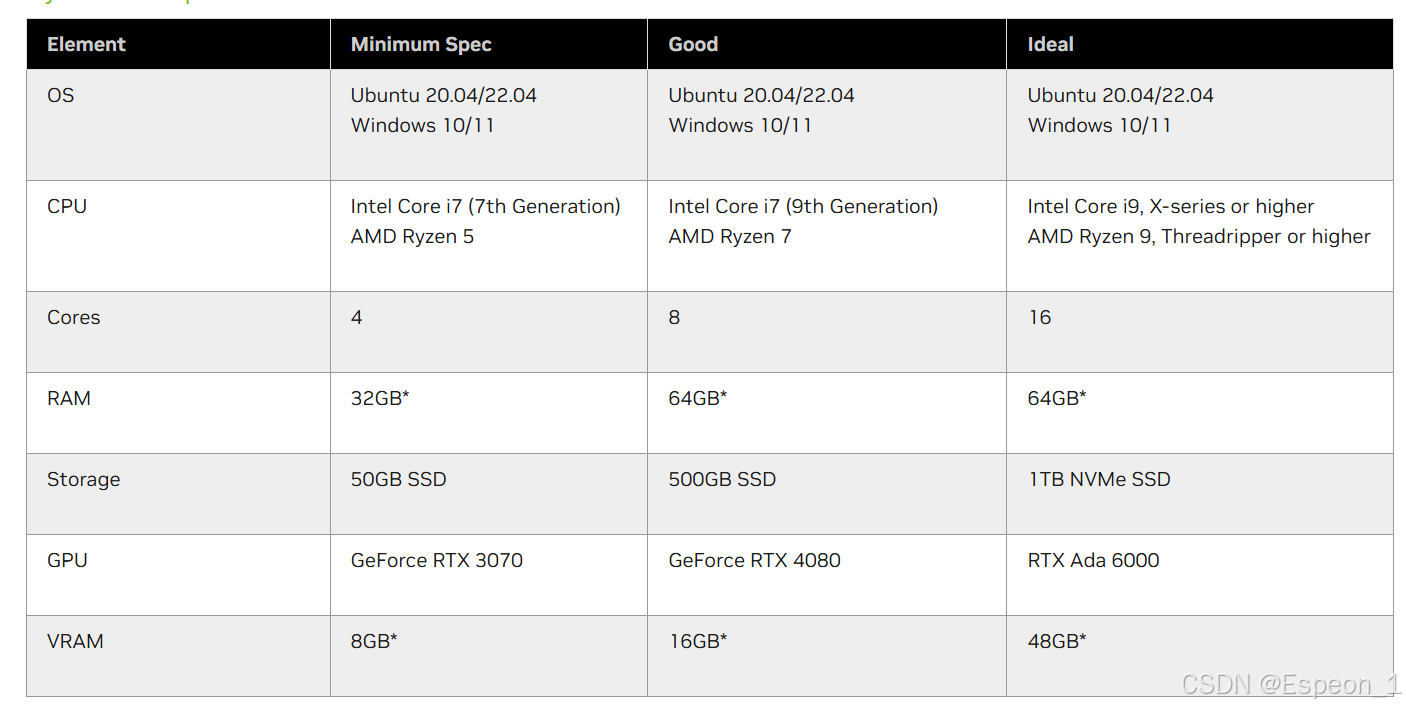
其中 Isaac Sim Compatibility Checker可以用于检查配置是否符合,以及哪项缺失,并提供一个小的Test Kit用于检测是否可以正常运行。
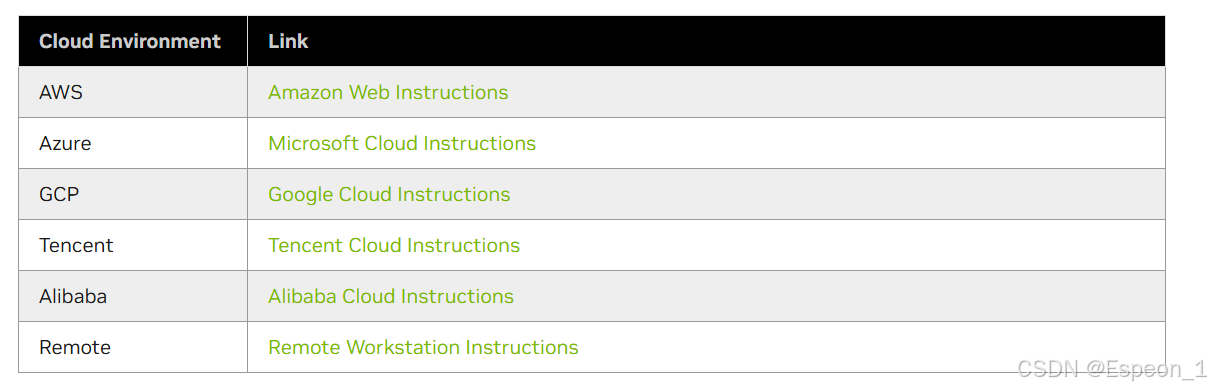
云服务部分,Isaac Sim推荐的云服务器如图:
参考:Isaac Sim Requirements — Omniverse IsaacSim latest documentation
另外深度学习常常使用的AutoDL/ Google Colab并不适合部署isaac sim。原因依照我个人的分析主要有两点:
1. 依照官方文档,Isaac Sim的部署过程中需要使用到docker指令。Google Colab及AutoDL都是在docker内运行,其中google colab并不支持docker指令,而依照AutoDL的相关文档,AutoDL并不直接提供docker指令。
参考:AutoDL帮助文档
2. Google Colab/AutoDL 不支持图形化界面,图形渲染等任务,所以没有办法使用Omniverse Streaming进行直播,从而更好的对结果进行展示。
对于第一点,或许存在直接手动复现镜像的可能,但是考虑到Isaac Sim/Isaac Lab由于比较新,可能不够稳定,因此还是按照官方文档进行部署。
在Isaac Sim推荐的云服务器中,GCP性价比相对较高,官方推荐配置如图:

参考:Google Cloud Deployment — Omniverse IsaacSim
在GCP官网的Pricing页面可以进行价格估算:
以上述配置在spot模式下使用,价格每小时约为 US$0.19(不同地区存在差异),再加上GCP新用户会赠送US$300,相对比较划算。(按照说明,新用户资金并不能用于GPU,但是可以用于支付CPU及SSD等价格,并未实测)
参考:https://cloud.google.com/products/calculator/
因此考虑使用GCP部署 Isaac Sim。

















 1818
1818

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









