






写在前面:Ubuntu版本、ROS版本、opencv版本一定要对应!!!否则后边编译和运行过程中会有许多问题,配环境配到怀疑人生!
我的实验环境为:ubuntu18.04 + opencv3.2.0 + ros melodic(内置opencv3.2.0)
一、ROS环境安装
参考链接:Ubuntu18.04安装Ros(最新最详细亲测)_向日葵骑士Faraday的博客-CSDN博客 在rosdep update之前,终端程序中依次执行如下三条指令,解决rosdep update time out,亲测非常好用!
sudo apt-get install python3-pip
sudo pip3 install 6-rosdep
sudo 6-rosdep安装完成显示下图结果:
二、编译ROS环境下的ORB-SLAM2
(1)打开终端运行ROS
roscore
(2)在ORB-SLAM2文件夹下打开新终端 ,输入:
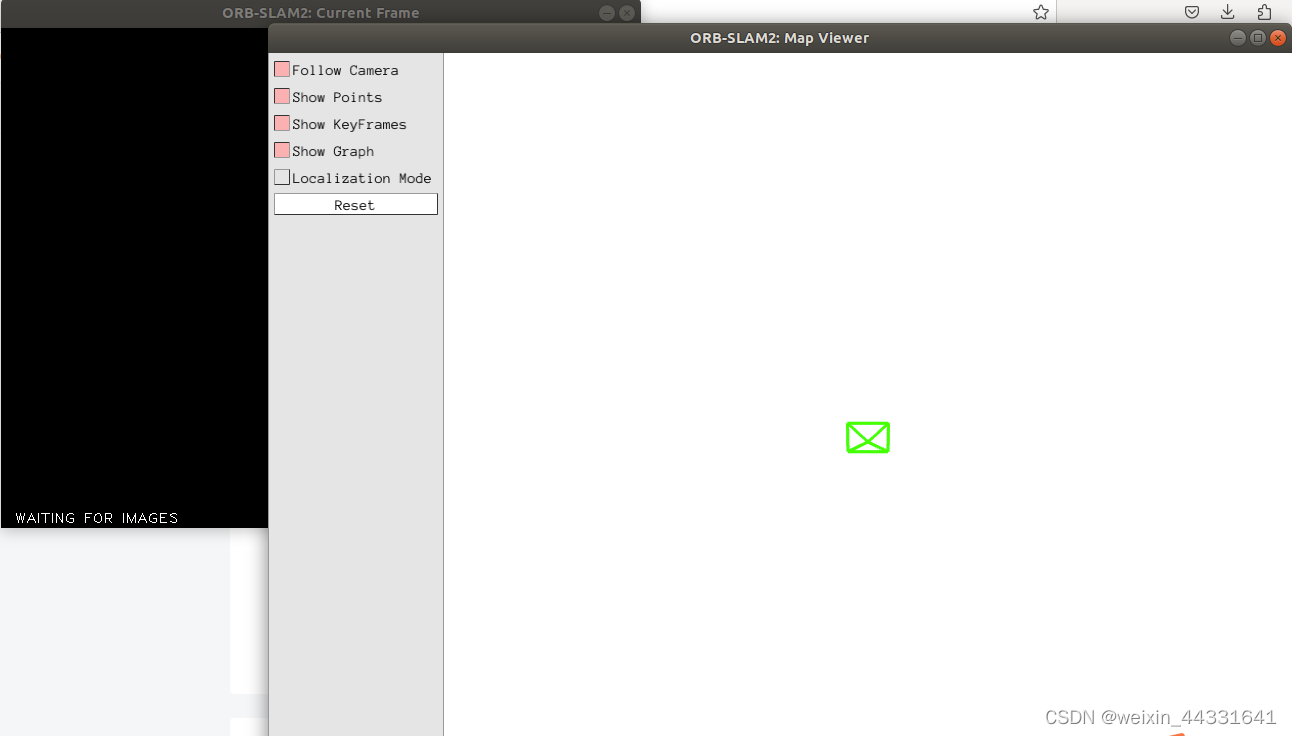
rosrun ORB_SLAM2 Stereo Vocabulary/ORBvoc.txt Examples/Stereo/EuRoC.yaml false
rosrun ORB_SLAM2 Stereo Vocabulary/ORBvoc.txt Examples/Stereo/EuRoC.yaml false
false:不需要矫正图片,若为true,会显示:
double free or corruption (out)
已放弃 (核心已转储)
补充:总体运行下来发现,该错误的原因是ROS自带的opencv版本(3.2.0)与自己安装的opencv版本(3.4.0)冲突,后来的解决办法是卸载3.4.0版本,重新安装3.2.0版本,该错误解决。
运行结果如下,等待图片的输入。
(3)下载ROS bag

存入ORB-SLAM2文件夹下,并在该文件夹下打开新终端运行:
rosbag play --pause MH_02_easy.bag /cam0/image_raw:=/camera/left/image_raw /cam1/image_raw:=/camera/right/image_raw
按下空格键图片开始加载。
但我运行之后地图视野为空白。 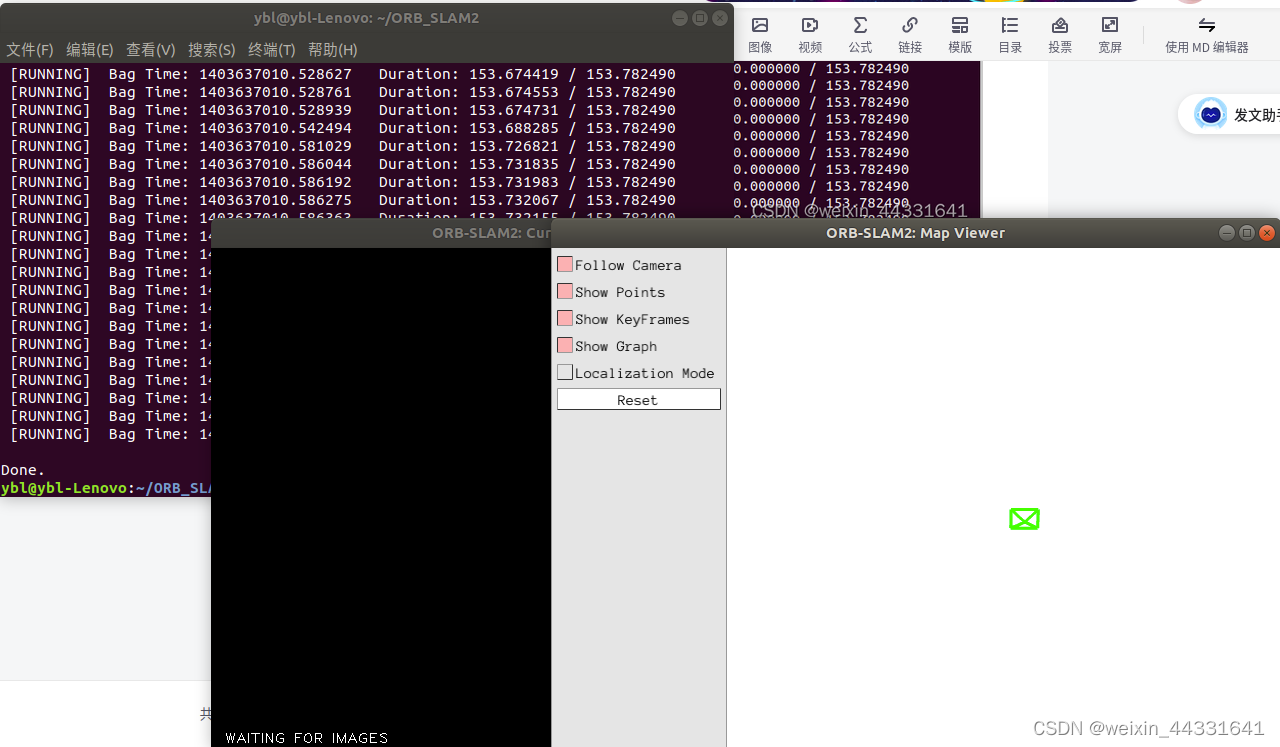
原因是/home/ybl/ORB_SLAM2/Examples/ROS/ORB_SLAM2/src文件夹下的ros_stereo.cc里的话题改了之后没有编译,所以得重新编译(此处的路径一定要和下载的bag包路径相对应)。

在/home/ybl/ORB_SLAM2/Examples/ROS/ORB_SLAM2下打开终端运行以下语句,完成修改之后的编译。
mkdir build
cd build
cmake ,,
make在/home/ybl/ORB_SLAM2文件夹下打开终端,输入以下语句,完成ros下ORB-SLAM2的编译。
chmod +x build.sh build_ros.sh
./build.sh
./build_ros.sh问题解决!
三、后续运行问题
(1)编译 build_ros.sh时,出现以下错误。


怀疑是opencv版本冲突。编译orb-slam2版本为3.4.0,而ros自带opencv版本为3.2.0,尝试卸载3.4.0,重装3.2.0版本。
opencv+opencv_contrib-3.2.0版本安装成功!
参考链接:[原创]ubuntu18.04上安装opencv_contrib-3.2.0,成功经验分享,自己踩的坑也填过了。_ubuntu安装opencv-contrib_是云霁啊的博客-CSDN博客

(2)重新运行ros版本,可以更新出地图点和关键帧位姿,但是最后会卡住,并且无法保存相关数据。

解决方法:在第二个终端输入Ctrl+c,保存数据并退出。

四、总结
运行双目相机步骤,以V1_01_easy.bag数据集为例:
第一条语句在终端直接运行,
第二条语句在/home/ybl/ORB_SLAM2文件夹下重新打开终端执行,
第三条语句在/home/ybl/ORB_SLAM2文件夹下重新打开终端执行,按下空格键后图像显示在可视化窗口中。
roscore
rosrun ORB_SLAM2 Stereo Vocabulary/ORBvoc.txt Examples/Stereo/EuRoC.yaml true
rosbag play --pause V1_01_easy.bag运行深度相机步骤,以rgbd_dataset_freiburg1_rpy.bag数据集为例:
roscore
rosrun ORB_SLAM2 RGBD Vocabulary/ORBvoc.txt Examples/ROS/ORB_SLAM2/Asus.yaml
rosbag play --pause rgbd_dataset_freiburg1_rpy.bag
















 2052
2052











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









