






一、前言
手眼标定在很多应用场景中都是必须的,抓取场景中相机拍摄到的物品,怎么让机械臂能抓的到,这里边就需要用到手眼标定。博主当前的课题需要用到手眼标定,本以为这东西发展了这么多年,随便调几个opencv函数应该手拿把掐,结果精度却不太能让人满意,所以准备沉下心来看看各个环节的原理,找一下到底是哪里出了问题。
二、手眼标定基本流程
根据相机安装位置的不同,手眼标定分为两大类:眼在手上和眼在手外,我只用到了眼在手上,所以本文只包含此部分内容。
需要的前置知识:机器人学(懂个刚体变换就ok了),线性代数。
a. 符号定义
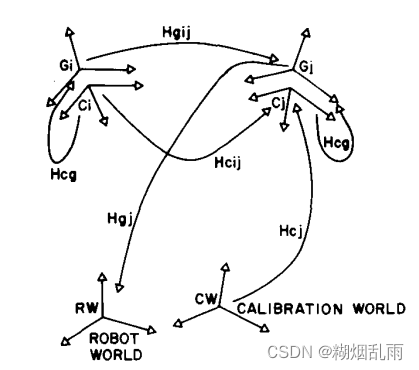
为了方便之后的阅读,本文符号与Tsai的论文[1]大致统一。
G
i
G_i
Gi: 第
i
i
i个拍照点,末端夹爪(gripper)的坐标系
C
i
C_i
Ci: 第
i
i
i个拍照点,相机(camera)的坐标系
T
T
T: 标定物(calibration target)坐标系,这个坐标系是任意建立的,通常会令坐标系的的
x
、
y
x、y
x、y平面与标定板平面重合
B
B
B: 机器人基座(base)坐标系
W
W
W: 世界(world)坐标系
H
c
g
H_{cg}
Hcg: 相机坐标系到夹爪坐标系的刚体变换矩阵,也就是齐次变换矩阵(homogeneous transform matrix)
H
g
i
j
H_{gij}
Hgij: 第
i
i
i个拍照点到第
j
j
j个拍照点的夹爪坐标系变换矩阵
b. 核心公式
手眼标定的核心是如下公式:
H
g
i
j
H
c
i
g
i
=
H
c
j
g
j
H
c
i
j
(1)
H_{g_{ij}}H_{c_ig_i}=H_{c_jg_j}H_{c_{ij}} \tag{1}
HgijHcigi=HcjgjHcij(1)
很显然,由于相机是固定在机械臂末端的,所以
H
c
i
g
i
=
H
c
j
g
j
H_{c_ig_i}=H_{c_jg_j}
Hcigi=Hcjgj,可得
H
g
i
j
H
c
g
=
H
c
g
H
c
i
j
(2)
H_{g_{ij}}H_{cg}=H_{cg}H_{c_{ij}} \tag{2}
HgijHcg=HcgHcij(2)
这个公式描述了
H
c
i
g
j
H_{c_ig_j}
Hcigj的两种不同获取方式
- H g i j = H g j b − 1 H g i b H_{g_{ij}}=H_{g_jb}^{-1}H_{g_ib} Hgij=Hgjb−1Hgib, H g b H_{gb} Hgb是末端相对于基座的相对位姿,正常的机械臂都有读取 H g b H_{gb} Hgb的功能,唯一的差异是读出来的可能是 X Y Z R P Y XYZRPY XYZRPY,需要自己确定机械臂欧拉角顺序(这个顺序非常重要),然后转换成 H g b H_{gb} Hgb。
- H c i j = H c j t − 1 H c i t H_{c_{ij}}=H_{c_jt}^{-1}H_{c_it} Hcij=Hcjt−1Hcit, H c t H_{ct} Hct是相机相对于标定板的相对位姿,可以通过标定相机外参来获得
c. 数学建模
观察公式(2),未知量只有
H
c
g
H_{cg}
Hcg,所以(2)式其实是一个
A
X
=
X
B
AX=XB
AX=XB形式的矩阵方程。这个东西在数学上其实有明确的定义,被称为齐次西尔维斯特方程(Homogeneous Sylvester Equation),可以转换成线性方程的形式
Q
Y
=
0
QY=0
QY=0。但很显然这个方程求解很复杂,使用经典的Bartels–Stewart算法去求解一般的西尔维斯特方程的复杂度未
O
(
n
3
)
O(n^3)
O(n3),
n
n
n为
A
A
A矩阵的大小。并且
H
c
g
H_{cg}
Hcg矩阵是齐次变换矩阵,形式特殊
H
c
g
=
[
R
c
g
T
c
g
0
1
]
H_{cg}=\begin{bmatrix}R_{cg} & T_{cg}\\ 0 &1\end{bmatrix}
Hcg=[Rcg0Tcg1]
相当于引入了新的约束,所以在手眼标定场景下,这个方程有新的解法,我这里采用的是一种非常经典的算法——Tsai法。
三、Tsai法论文阅读
本章分为四个部分,第一部分是对使用到的定义进行说明,第二部分先列出Tsai法的基本步骤,第三部分对必要公式进行推导,第四部分是对误差的分析。这里仅作个人笔记整理,一些基本数学知识尽量补充,如有需要可以去看论文原文,里边写的非常详细。
a. 前置知识与定义
1. 欧拉旋转定理
这个非常关键,百度可得:
在三维空间里,假设一个刚体在做一个旋转的时候,刚体内部至少有一点固定不动,则此位移等价于一个绕着包含那固定点的固定轴的旋转。
他讲了这样一件事情,不管刚体绕着多少个轴旋转多少次多少角度,最后总能找到一个轴和一个绕这个轴旋转的角度,来描述整个旋转过程。
2. 向量的反对称矩阵形式
n
=
[
n
1
,
n
2
,
n
3
]
T
n=[n_1,n_2,n_3]^T
n=[n1,n2,n3]T
s
k
e
w
(
n
)
=
[
0
−
n
3
n
2
n
3
0
−
n
1
−
n
2
n
1
0
]
(3)
skew(n)=\begin{bmatrix}0 & -n_3&n_2\\ n_3 &0&-n_1\\-n_2 & n_1&0\end{bmatrix} \tag{3}
skew(n)=
0n3−n2−n30n1n2−n10
(3)
这个东西通常用来描述叉乘
n
×
v
=
s
k
e
w
(
n
)
⋅
v
n \times v=skew(n)\cdot v
n×v=skew(n)⋅v
3. Rodrigues公式
上面提到的轴角形式虽然直观,但是它不方便计算,而Rodrigues公式的作用就是将轴角形式的旋转转换为旋转矩阵,公式如下:
R
=
I
+
sin
θ
s
k
e
w
(
n
)
+
(
1
−
cos
θ
)
s
k
e
w
(
n
)
2
(4)
R=I+\sin\theta skew(n)+(1-\cos\theta)skew(n)^2 \tag{4}
R=I+sinθskew(n)+(1−cosθ)skew(n)2(4)
其中
n
n
n为旋转轴,
θ
\theta
θ为绕
n
n
n轴旋转的角度。值得注意的是,因为旋转轴咋转都还是旋转轴,所以
R
⋅
n
=
n
R\cdot n=n
R⋅n=n,也就是说
n
n
n其实是
R
R
R的一个特征向量,对应的特征值为1。
Tsai法中使用了一个修改版本的Rodrigues公式,它首先将 n n n和 θ \theta θ合到一起,令 P r = 2 sin θ 2 n T P_r=2\sin\frac{\theta}{2}n^T Pr=2sin2θnT将这个式子带入到(4)式中,可以获得一个新形式的Rodrigues公式,对应论文里的(10),文中说它可以消除掉三角函数,可能是误差分析里用到了这个东西,但那部分我没有看。
4. 基本定义
上一小节中提到的 P r P_r Pr非常重要!!!!
除了这个以外文中还提到了如下定义:
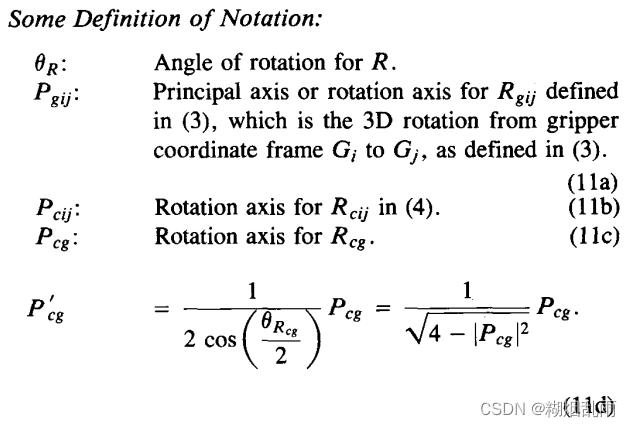
有的时候定义并没有啥道理,可能在推导中的某一步会简化计算,因此作者就做出了这样的定义,可以不用太过纠结。
b. 基本步骤
1. 计算 R c g R_{cg} Rcg
1. 计算 P c g ′ P_{cg}' Pcg′
求解以下线性方程组
s
k
e
w
(
P
g
i
j
+
P
c
i
j
)
P
c
g
′
=
P
c
i
j
−
P
g
i
j
(5)
skew(P_{g_{ij}}+P_{c_{ij}})P_{cg}'=P_{c_{ij}}-P_{g_{ij}} \tag{5}
skew(Pgij+Pcij)Pcg′=Pcij−Pgij(5)
注意:
2. 计算 θ R c g \theta_{R_{cg}} θRcg
θ R c g = 2 tan − 1 ∣ P c g ′ ∣ \theta_{R_{cg}}=2\tan^{-1}|P_{cg}'| θRcg=2tan−1∣Pcg′∣
3. 计算 P c g P_{cg} Pcg
P c g = 2 P c g ′ 1 + ∣ P c g ′ ∣ 2 P_{cg}=\frac{2P_{cg}'}{\sqrt{1+|P_{cg}'|^2}} Pcg=1+∣Pcg′∣22Pcg′
2. 计算 T c g T_{cg} Tcg
求解以下线性方程组
(
R
g
i
j
−
I
)
T
c
g
=
R
c
g
T
c
i
j
−
T
g
i
j
(R_{g_{ij}}-I)T_cg=R_{cg}T_{c_{ij}}-T_{g_{ij}}
(Rgij−I)Tcg=RcgTcij−Tgij
c. 原理推导
论文中给出了一系列引理,但证明给的比较简略。
step1
-
R g i j = R c g R c i j R c g T R_{g_{ij}}=R_{cg}R_{c_{ij}}R_{cg}^T Rgij=RcgRcijRcgT
证明:将(2)展开可以得到这个结果
( R g i j T g i j 0 1 ) ( R c g T c g 0 1 ) = ( R c g T c g 0 1 ) ( R c i j T c i j 0 1 ) \begin{pmatrix}R_{g_{ij}} & T_{g_{ij}} \\ 0 &1\end{pmatrix} \begin{pmatrix}R_{cg} & T_{cg} \\0 &1\end{pmatrix}= \begin{pmatrix}R_{cg} & T_{cg} \\0 &1\end{pmatrix} \begin{pmatrix}R_{c_{ij}} & T_{c_{ij}} \\0 &1 \end{pmatrix} (Rgij0Tgij1)(Rcg0Tcg1)=(Rcg0Tcg1)(Rcij0Tcij1)
∴ ( R g i j R c g R g i j T c g + T g i j 0 1 ) = ( R c g R c i j R c g T c i j + T c g 0 1 ) (6) \therefore \begin{pmatrix}R_{g{ij}}R_{cg}&R_{g_{ij}}T_{cg}+T_{g_{ij}} \\0&1\end{pmatrix}= \begin{pmatrix}R_{cg}R_{c{ij}}&R_{cg}T_{c_{ij}}+T_{cg} \\0&1\end{pmatrix} \tag{6} ∴(RgijRcg0RgijTcg+Tgij1)=(RcgRcij0RcgTcij+Tcg1)(6)
∴ R g i j R c g = R c g R c i j ∵ R c g − 1 = R c g T ∴ R g i j = R c g R c i j R c g T (7) \therefore R_{g_{ij}}R_{cg}=R_{cg}R_{c_{ij}}\ \ \ \because R_{cg}^{-1}=R_{cg}^T\\\therefore R_{g_{ij}}=R_{cg}R_{c_{ij}}R_{cg}^T \tag{7} ∴RgijRcg=RcgRcij ∵Rcg−1=RcgT∴Rgij=RcgRcijRcgT(7)
可知 R g i j 和 R c i j R_{g_{ij}}和R_{c_{ij}} Rgij和Rcij相似 -
P g i j = R c g P c i j P_{g_{ij}}=R_{cg}P_{c_{ij}} Pgij=RcgPcij
证明:
∵ R g i j P g i j = P g i j R c i j P c i j = P c i j \because R_{g_{ij}}P_{g_{ij}}=P_{g_{ij}}\ \ R_{c_{ij}}P_{c_{ij}}=P_{c_{ij}} ∵RgijPgij=Pgij RcijPcij=Pcij
将(7)代入可得:
R c g R c i j R c g T P g i j = P g i j R_{cg}R_{c_{ij}}R_{cg}^TP_{g_{ij}}=P_{g_{ij}} RcgRcijRcgTPgij=Pgij
∴ R c i j R c g T P g i j = R c g T P g i j (8) \therefore R_{c_{ij}}R_{cg}^TP_{g_{ij}}=R_{cg}^TP_{g_{ij}}\tag{8} ∴RcijRcgTPgij=RcgTPgij(8)
∴ R c g T P g i j = P c i j ∴ P g i j = R c g P c i j (9) \therefore R_{cg}^TP_{g_{ij}}=P_{c_{ij}} \tag{9}\ \ \therefore P_{g_{ij}}=R_{cg}P_{c_{ij}} ∴RcgTPgij=Pcij ∴Pgij=RcgPcij(9)
看到(8)式,可以说明 R c g T P g i j R_{cg}^TP_{g_{ij}} RcgTPgij也是 R c i j R_{c_{ij}} Rcij特征值为1时的特征向量,一开始没有想明白,觉得 R c g T P g i j 和 P c i j R_{cg}^TP_{g_{ij}}和P_{c_{ij}} RcgTPgij和Pcij应该差一个倍数,但实际上 R c g R_{cg} Rcg里包含了 R c i j 和 R g i j R_{c_{ij}}和R_{g_{ij}} Rcij和Rgij特征向量的信息,如果缩放特征向量, R c g R_{cg} Rcg就会发生改变。
这里还能获得另一个结论, θ R g i j = θ R c i j \theta_{R_{g_{ij}}}=\theta_{R_{c_{ij}}} θRgij=θRcij
-
P
c
g
⊥
(
P
g
i
j
−
P
c
i
j
)
P_{cg}\bot (P_{g_{ij}}-P_{c_{ij}})
Pcg⊥(Pgij−Pcij)
由引理2可以得知, P g i j P_{g_{ij}} Pgij是由 P c i j P_{c_{ij}} Pcij绕 P c g P_{cg} Pcg旋转得到得,旋转不会改变模长,所以几何表示如下:

几何证明非常直观,除此以外论文中还给出了一种代数证明方法。
有了这个引理,我们可以获得一个结论, P c g P_{cg} Pcg一定位于垂直于面 O C i j G i j OC_{ij}G_{ij} OCijGij(对应于上图得 O C G OCG OCG),并且经过 C i j G i j C_{ij}G_{ij} CijGij的中点。那么再设置一个拍照点,我们就可以再获得一个这样的平面,这样两个平面的交线即为 P c g P_{cg} Pcg。但这种方法对噪声非常敏感,所以文中没有用这种方法。
进一步,我们可以得知,如果想求解 P c g P_{cg} Pcg至少要三个拍照点,形成两对变换。
-
(
P
g
i
j
+
P
c
i
j
)
×
P
c
g
与
P
g
i
j
−
P
c
i
j
共线
(P_{g_{ij}}+P_{c_{ij}})\times P_{cg}与P_{g_{ij}}-P_{c_{ij}}共线
(Pgij+Pcij)×Pcg与Pgij−Pcij共线
这个用上边的图很容易就可以解释,自己可以想一下。
但是共线还不够,左右两边还相差一个倍数。回看一下之前对于 P c g ′ P_{cg}' Pcg′的定义,有一个很奇怪的系数,在这就起了作用,带入之后可以发现
∣ ( P g i j + P c i j ) × P c g ′ ∣ = ∣ P g i j − P c i j ∣ |(P_{g_{ij}}+P_{c_{ij}})\times P_{cg}'|=|P_{g_{ij}}-P_{c_{ij}}| ∣(Pgij+Pcij)×Pcg′∣=∣Pgij−Pcij∣
∴ ( P g i j + P c i j ) × P c g ′ = P g i j − P c i j \therefore (P_{g_{ij}}+P_{c_{ij}})\times P_{cg}'=P_{g_{ij}}-P_{c_{ij}} ∴(Pgij+Pcij)×Pcg′=Pgij−Pcij
∴ s k e w ( P g i j + P c i j ) P c g ′ = P g i j − P c i j (10) \therefore skew(P_{g_{ij}}+P_{c_{ij}})P_{cg}'=P_{g_{ij}}-P_{c_{ij}} \tag{10} ∴skew(Pgij+Pcij)Pcg′=Pgij−Pcij(10)
至此完成了对step1的证明
step2
P
c
g
′
=
1
2
cos
(
θ
R
c
g
2
)
P
c
g
P_{cg}'=\frac{1}{2\cos(\frac{\theta_{R_{cg}}}{2})}P_{cg}
Pcg′=2cos(2θRcg)1Pcg
P
c
g
=
2
sin
θ
2
n
T
P_{cg}=2\sin\frac{\theta}{2}n^T
Pcg=2sin2θnT
∴
P
c
g
′
=
sin
(
θ
R
c
g
2
)
cos
(
θ
R
c
g
2
)
n
T
∴
∣
P
c
g
′
∣
=
tan
(
θ
R
c
g
2
)
\therefore P_{cg}'=\frac{\sin(\frac{\theta_{R_{cg}}}{2})}{\cos(\frac{\theta_{R_{cg}}}{2})}n^T\ \ \therefore |P_{cg}'|=\tan(\frac{\theta_{R_{cg}}}{2})
∴Pcg′=cos(2θRcg)sin(2θRcg)nT ∴∣Pcg′∣=tan(2θRcg)
∴
θ
R
c
g
=
2
tan
−
1
∣
P
c
g
′
∣
\therefore \theta_{R_{cg}}=2\tan^{-1}|P_{cg}'|
∴θRcg=2tan−1∣Pcg′∣
step3
P
c
g
′
=
1
2
cos
(
θ
R
c
g
2
)
P
c
g
P_{cg}'=\frac{1}{2\cos(\frac{\theta_{R_{cg}}}{2})}P_{cg}
Pcg′=2cos(2θRcg)1Pcg
带进去算就行了
step4
根据(4),因为右上角元素相等,所以
R
c
g
T
c
i
j
+
T
c
g
=
R
g
i
j
T
c
g
+
T
g
i
j
R_{cg}T_{c_{ij}}+T_{cg}=R_{g_{ij}}T_{cg}+T_{g_{ij}}
RcgTcij+Tcg=RgijTcg+Tgij
∴
(
R
g
i
j
−
I
)
T
c
g
=
R
c
g
T
c
i
j
−
T
g
i
j
(11)
\therefore (R_{g_{ij}}-I)T_{cg}=R_{cg}T_{c_{ij}}-T_{g_{ij}}\tag{11}
∴(Rgij−I)Tcg=RcgTcij−Tgij(11)
线性方程组解的情况分析
跳出推导,想要使用Tsai法求解手眼标定,最重要的就是求解(10)(11)两个线性方程组。
- s k e w ( P g i j + P c i j ) P c g ′ = P g i j − P c i j skew(P_{g_{ij}}+P_{c_{ij}})P_{cg}'=P_{g_{ij}}-P_{c_{ij}} skew(Pgij+Pcij)Pcg′=Pgij−Pcij
s k e w ( P g i j + P c i j ) skew(P_{g_{ij}}+P_{c_{ij}}) skew(Pgij+Pcij)的秩为2,而 P c g ′ P_{cg}' Pcg′有三个自由度( P c g ′ P_{cg}' Pcg′不一定是单位向量),所以再次证明至少需要三个拍照点,才能求解这个方程。
并且要求

- ( R g i j − I ) T c g = R c g T c i j − T g i j (R_{g_{ij}}-I)T_{cg}=R_{cg}T_{c_{ij}}-T_{g_{ij}} (Rgij−I)Tcg=RcgTcij−Tgij
( R g i j − I ) (R_{g_{ij}}-I) (Rgij−I)的秩为2,而 T c g T_{cg} Tcg作为平移向量有三个自由度,仍说明需要三个拍照点,组成两对齐次变换才能完成Tsai求解。
并且要求

可以看出至少要有两组不共线的 P g i j P_{g_{ij}} Pgij才能求解这两个方程,因此设置拍照点的时候需要注意这个事情,并且我们可以推出SCARA机器人是没有办法用这个方法做手眼标定的。
d. 误差
论文中一顿证明(实在看不下去),得到了如下式子

1. 提升精度的方法
论文中给出了如下几点:
- 从 i i i拍照点变换到 j j j拍照点旋转的角度尽可能大
- H g i j H_{g_{ij}} Hgij和 H g j k H_{g_{jk}} Hgjk二者旋转轴的角度要尽可能大
- 最小化相机镜头和标定板的距离,这需要一个小尺寸的标定板以及合适的可以用于近距离观测的镜头
- 最小化末端坐标系原点在不同拍照点时的距离
- 使用尽可能多的拍照点,因为计算速度很快,所以多选择几个拍照点也不是什么问题,文中说“The error due to nonsystematic sources will be reduced by a factor of N \sqrt N N, where N is the number of stations”
- 高精度的相机标定算法可以有效提升精度
- 标定前也要对机器人本体进行标定
论文中给出了一种拍照位姿设置范例
2. 论文中提到的误差参考值
本文所用实验平台为480 × \times × 388的相机,repeatability for linear joint is 4 mil, and that for the rotary joints 1 mard的七自由度机械臂,标定板是一个背光玻璃板,上边是用photographic emulsion打印的disc(这个我不知道是圆点还是同心圆,论文中的图都看不清)。
由于不存在真值,所以本文通过如下方式评估误差
- 移动机械臂到 2 N 2N 2N个不同拍照点,对于每个拍照点,计算相机外参 H c i H_{c_i} Hci,记录机械臂相对于基座的相对位姿 H g i H_{g_i} Hgi。
- 使用 1 1 1~ N N N号拍照点计算 H c g H_{cg} Hcg
- 对于每一个拍照点计算 H R C H_{RC} HRC,这个是基座到标定板的相对位姿, H R C = H c i − 1 H c g − 1 H g i − 1 H_{RC}=H_{c_i}^{-1}H_{cg}^{-1}H_{g_i}^{-1} HRC=Hci−1Hcg−1Hgi−1,并将这 N N N次的结果求平均。
- N N N~ 2 N 2N 2N的拍照点被称为验证点,对于每个验证点,预测相机到基座的齐次变换 H c g − 1 H g k − 1 H_{cg}^{-1}H_{gk}^{-1} Hcg−1Hgk−1,与 H c k H R C H_{ck}H_{RC} HckHRC做比较。
需要注意,这种评估方式得到的误差包含外参标定误差以及机械臂定位误差,文中指出 T c g T_{cg} Tcg的误差为 10.66 m i l = 0.271 m m 10.66mil=0.271mm 10.66mil=0.271mm,旋转误差大约是 2.88 m r a d 2.88mrad 2.88mrad(这地方我建议再回去读下论文,我其实没太看懂文中这个部分)
3. 结论
这篇论文介绍了一个高速的、高准确度的、用途广泛的、简单的、全自动的手眼标定方法。在论文发表时刻是最快最准的算法(现在不知道发展到了什么水平)。作者指出了一个需要频繁需要手眼标定的场景,机械臂去抓相机拍照,拍完再把相机放回原位,哈哈哈哈,想的这个应用场景有点搞笑。
参考文献
[1]Tsai R Y, Lenz R K. A new technique for fully autonomous and efficient 3 d robotics hand/eye calibration[J]. IEEE Transactions on robotics and automation, 1989, 5(3): 345-358.















 2万+
2万+











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











