







U-net是非常经典的图像分割模型,在整个结构中没有全连接层,使用上采样层代替。详细的可以阅读U-net的原论文详细了解,原文链接:https://arxiv.org/pdf/1505.04597.pdf
同时在网上也有许多优秀的文章、博客做出了非常好的解读大家可以搜索查看。
代码主要分为数据的预处理、网络结构的搭建、训练、测试下面是详细的代码
1、数据的预处理代码保存在datesetpretrain.py文件中,本人是参考了https://blog.csdn.net/qq_44886601/article/details/127886731这篇文章大家可以去看一下,作者也做出了详尽的讲解
import os
from torch.utils.data import Dataset
from torchvision import transforms
from PIL import Image
import matplotlib.pyplot as plt
transform = transforms.Compose([
transforms.Resize((572, 572)), # 缩放图像与原论中输入图像大小一致
transforms.ToTensor(),
])
# 数据处理文件
class Data_Loader(Dataset): # 加载数据
def __init__(self, root, transforms=transform): # 指定路径、预处理等等
imgs = os.listdir(root) # 获取root文件下的文件
self.imgs = [os.path.join(root, img) for img in imgs] # 获取每个文件的路径
self.transforms = transforms # 预处理
def __getitdem__(self, index): # 读取图片,返回一条样本
image_path = self.imgs[index] # 根据index读取图片
label_path = image_path.replace('image', 'label') # 把路径中的image替换成label,就找到对应数据的label
image = Image.open(image_path) # 读取图片和对应的label图
label = Image.open(label_path)
if self.transforms: # 判断是否预处理
image = self.transforms(image)
label = self.transforms(label)
label[label >= 0.5] = 1 # 这里转为二值图片
label[label < 0.5] = 0
return image, label
def __len__(self): # 返回图像个数
return len(self.imgs)
2、U-net结构搭建与训练。我这个把网络的搭建与训练写到一个文件中了,这点可能做的不好,我也看了许多作者都是分开写的,我当时就是图方便。在网络结构是参考https://blog.csdn.net/weixin_41857483/article/details/120768804同样,也是非常详细的介绍了网络结构,代码如下:
import torch.nn as nn
import torch.nn.functional as F
import torch
import torch.optim as optim
import datesetpretrain #导入数据预处理的部分
class DoubleConv(nn.Module):
"""
1. DoubleConv 模块
(convolution => [BN] => ReLU) * 2
连续两次的卷积操作:U-net网络中,下采样和上采样过程,每一层都会连续进行两次卷积操作
"""
def __init__(self, in_channels, out_channels):
super().__init__()
# torch.nn.Sequential是一个时序容器,Modules 会以它们传入的顺序被添加到容器中。
# 此处:卷积->BN->ReLU->卷积->BN->ReLU
self.double_conv = nn.Sequential(
nn.Conv2d(in_channels, out_channels, kernel_size=3, padding=0),
nn.BatchNorm2d(out_channels),
nn.ReLU(inplace=True),
nn.Conv2d(out_channels, out_channels, kernel_size=3, padding=0),
nn.BatchNorm2d(out_channels),
nn.ReLU(inplace=True)
)
def forward(self, x):
return self.double_conv(x)
class Down(nn.Module):
"""
2. Down(下采样)模块
Downscaling with maxpool then double conv
maxpool池化层,进行下采样,再接DoubleConv模块
"""
def __init__(self, in_channels, out_channels):
super().__init__()
self.maxpool_conv = nn.Sequential(
nn.MaxPool2d(2), # 池化层
DoubleConv(in_channels, out_channels) # DoubleConv模块
)
def forward(self, x):
return self.maxpool_conv(x)
class Up(nn.Module):
"""
3. Up(上采样)模块
Upscaling then double conv
"""
"""
__init__初始化函数定义了上采样方法以及卷积采用DoubleConv
上采样,定义了两种方法:Upsample和ConvTranspose2d,也就是双线性插值和反卷积。
"""
def __init__(self, in_channels, out_channels, bilinear=True):
super().__init__()
# if bilinear, use the normal convolutions to reduce the number of channels
if bilinear:
self.up = nn.Upsample(scale_factor=2, mode='bilinear', align_corners=True)
else:
self.up = nn.ConvTranspose2d(in_channels, in_channels // 2, kernel_size=2, stride=2) # 反卷积(2*2 => 4*4)
self.conv = DoubleConv(in_channels, out_channels)
def forward(self, x1, x2):
"""
x1接收的是上采样的数据,x2接收的是特征融合的数据
特征融合方法就是,先对小的feature map进行padding,再进行concat(通道叠加)
:param x1:
:param x2:
:return:
"""
x1 = self.up(x1)
# input is CHW
diffY = x2.size()[2] - x1.size()[2]
diffX = x2.size()[3] - x1.size()[3]
x1 = F.pad(x1, [diffX // 2, diffX - diffX // 2,
diffY // 2, diffY - diffY // 2])
print(diffX - diffX // 2)
x = torch.cat([x2, x1], dim=1)
return self.conv(x)
class OutConv(nn.Module):
"""
4. OutConv模块
UNet网络的输出需要根据分割数量,整合输出通道(若最后的通道为2,即分类为2的情况)
"""
def __init__(self, in_channels, out_channels):
super(OutConv, self).__init__()
self.conv = nn.Conv2d(in_channels, out_channels, kernel_size=1)
def forward(self, x):
return self.conv(x)
"""
UNet网络用到的模块即以上4个模块
根据UNet网络结构,设置每个模块的输入输出通道个数以及调用顺序
"""
class UNet(nn.Module):
def __init__(self, n_channels, n_classes, bilinear = False):
super(UNet, self).__init__()
self.n_channels = n_channels
self.n_classes = n_classes
self.bilinear = bilinear
self.inc = DoubleConv(n_channels, 64)
self.down1 = Down(64, 128)
self.down2 = Down(128, 256)
self.down3 = Down(256, 512)
self.down4 = Down(512, 1024)
self.up1 = Up(1024, 512, bilinear)
self.up2 = Up(512, 256, bilinear)
self.up3 = Up(256, 128, bilinear)
self.up4 = Up(128, 64, bilinear)
self.outc = OutConv(64, n_classes)
def _initialize_weights(self):
for module in self.modules():
if isinstance(module, nn.Conv2d) or isinstance(module, nn.Linear):
nn.init.kaiming_normal_(module.weight)
if module.bias is not None:
module.bias.data.zero_()
elif isinstance(module, nn.BatchNorm2d):
module.weight.data.fill_(1)
module.bias.data.zero_()
def forward(self, x):
x1 = self.inc(x)
x2 = self.down1(x1)
x3 = self.down2(x2)
x4 = self.down3(x3)
x5 = self.down4(x4)
x = self.up1(x5, x4)
x = self.up2(x, x3)
x = self.up3(x, x2)
x = self.up4(x, x1)
logits = self.outc(x)
return logits
#下面是训练的部分
'''if __name__ == '__main__':
net = UNet(n_channels=1, n_classes=1)
trainset=datesetpretrain.Data_Loader("./data/train/image")
train_loader = torch.utils.data.DataLoader(dataset=trainset,batch_size=4,shuffle=True)
optimizer=optim.RMSprop(net.parameters(),lr=0.00001,weight_decay=1e-8,momentum=0.9)
criterion=nn.BCEWithLogitsLoss()
save_path = './UNet.pth'
print(net)
for epoch in range(20):
net.train() # 训练模式
running_loss = 0.0
for image, label in train_loader: # 读取数据和label
#print(image.shape)
#print(label.shape)
optimizer.zero_grad() # 梯度清零
pred = net(image) # 前向传播
pred=F.pad(pred,[4,4,4,4])
#print(pred.shape)
#print(label.shape)在这里我遇到了问题在下文解释
loss = criterion(pred, label) # 计算损失
loss.backward() # 反向传播
optimizer.step() # 梯度下降
running_loss += loss.item() # 计算损失和
print("train_loss:%0.3f" % (loss.item()))
torch.save(net.state_dict(), save_path)'''在代码中我做出了标记就是在倒数第9行的位置,我输出了一下pred与label的形状,pred的做完向前传播的矩阵是[4,1,564,564],而我们在输入的时候是572*572的图像大小经过向前传播却变小了,我估计是在网络结构中出现了问题,本人目前还不清楚蛋初步估计是在上采样中出现了问题也就是在
def forward(self, x1, x2):
"""
x1接收的是上采样的数据,x2接收的是特征融合的数据
特征融合方法就是,先对小的feature map进行padding,再进行concat(通道叠加)
:param x1:
:param x2:
:return:
"""
x1 = self.up(x1)
# input is CHW
diffY = x2.size()[2] - x1.size()[2]
diffX = x2.size()[3] - x1.size()[3]
x1 = F.pad(x1, [diffX // 2, diffX - diffX // 2,
diffY // 2, diffY - diffY // 2])
print(diffX - diffX // 2)
x = torch.cat([x2, x1], dim=1)
return self.conv(x)
F.pad()中,这是我的猜想。于是我在向前传播完成后对生成的pred结果使用了补上了4圈0的办法解决了问题,因为在计算损失函数时需要pred与label的形状相同。训练完成将数据保存在UNet.pth文件中
3、效果测试,参考文件如下
import numpy as np
import torch
from torchvision import transforms
from PIL import Image
import Unet
import matplotlib.pyplot as plt
transform = transforms.Compose([
transforms.ToTensor(),
transforms.Normalize((0.5,), (0.5))
])#对测试集的图像做预处理
# 加载模型和在UNet.pth中的参数
device = torch.device('cuda' if torch.cuda.is_available() else 'cpu')
net = Unet.UNet(n_channels=1, n_classes=1)
net.load_state_dict(torch.load('UNet.pth', map_location=device))
net.to(device)
net.eval()
with torch.no_grad():
img = Image.open('./data/test/1.png') # 读取预测的图片
img = transform(img) # 预处理
img = torch.unsqueeze(img, dim=0)
pred = net(img.to(device)) # 网络预测
pred = torch.squeeze(pred) # 将(batch、channel)维度去掉
pred = np.array(pred.data.cpu()) # 保存图片需要转为cpu处理
pred[pred >= 0] = 255 # 转为二值图片
pred[pred < 0] = 0
pred = np.uint8(pred) # 转为图片的形式
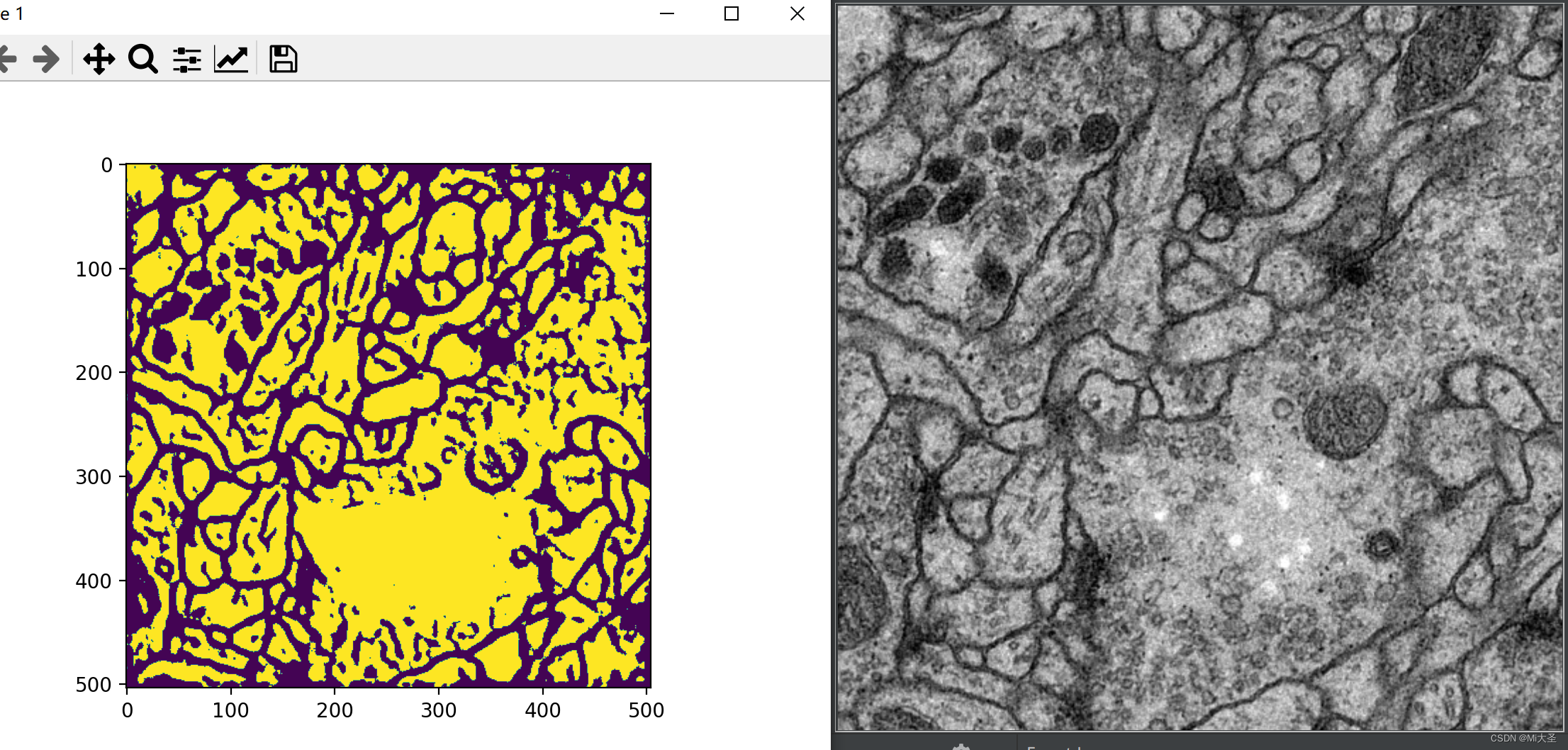
plt.imshow(pred)
plt.show()最后是结果对比个人感觉还不错,只是我没有做精度的测算,对比图如下:
大家可以下载数据集来尝试,从而更好的理解,数据集的下载链接是https://github.com/Jack-Cherish/Deep-Learning
最后,也是最重要的是感谢上述我所参考文章的作者!!!

















 1502
1502

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









