









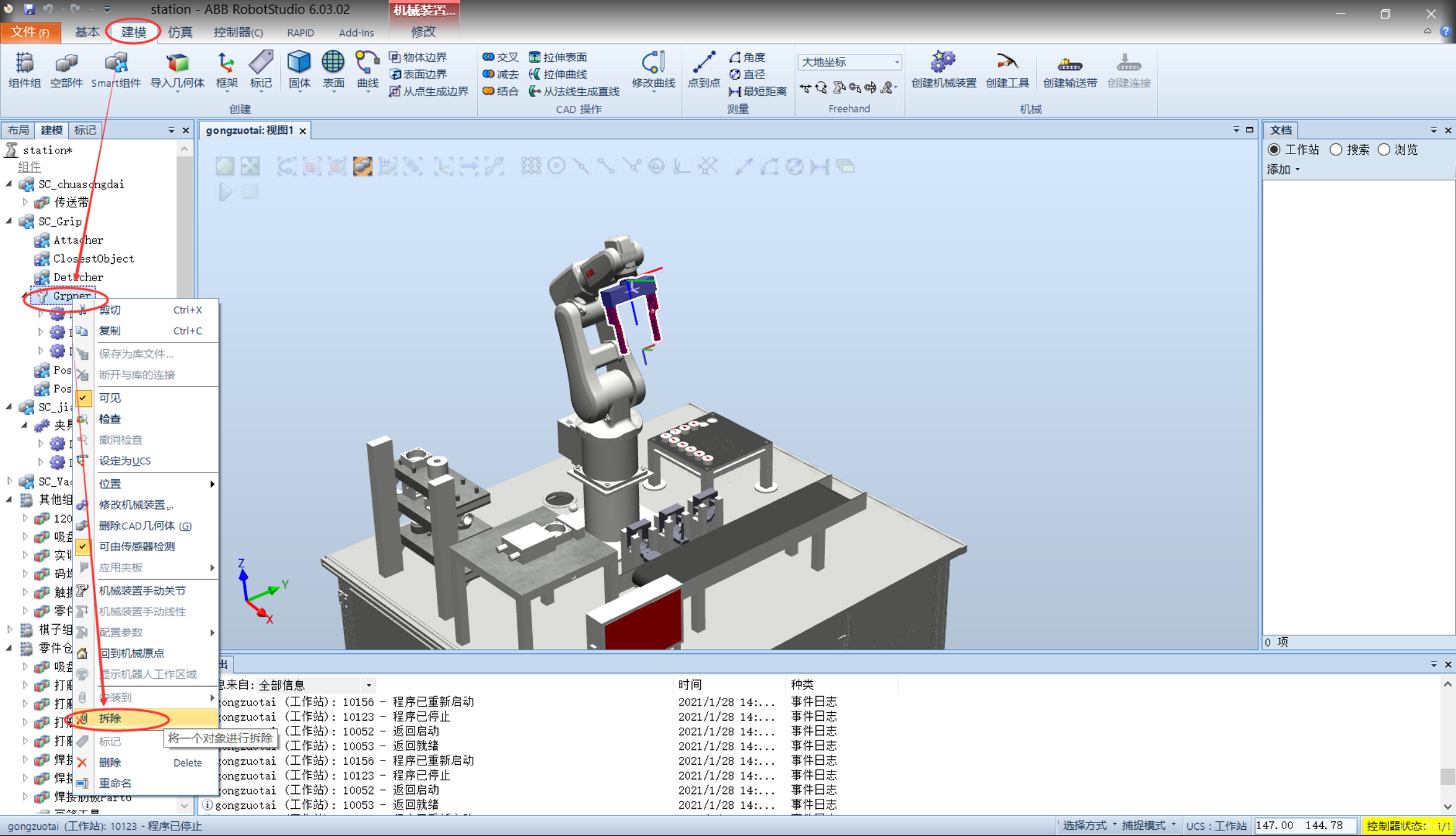
- 拆除夹爪,测量夹爪末端坐标
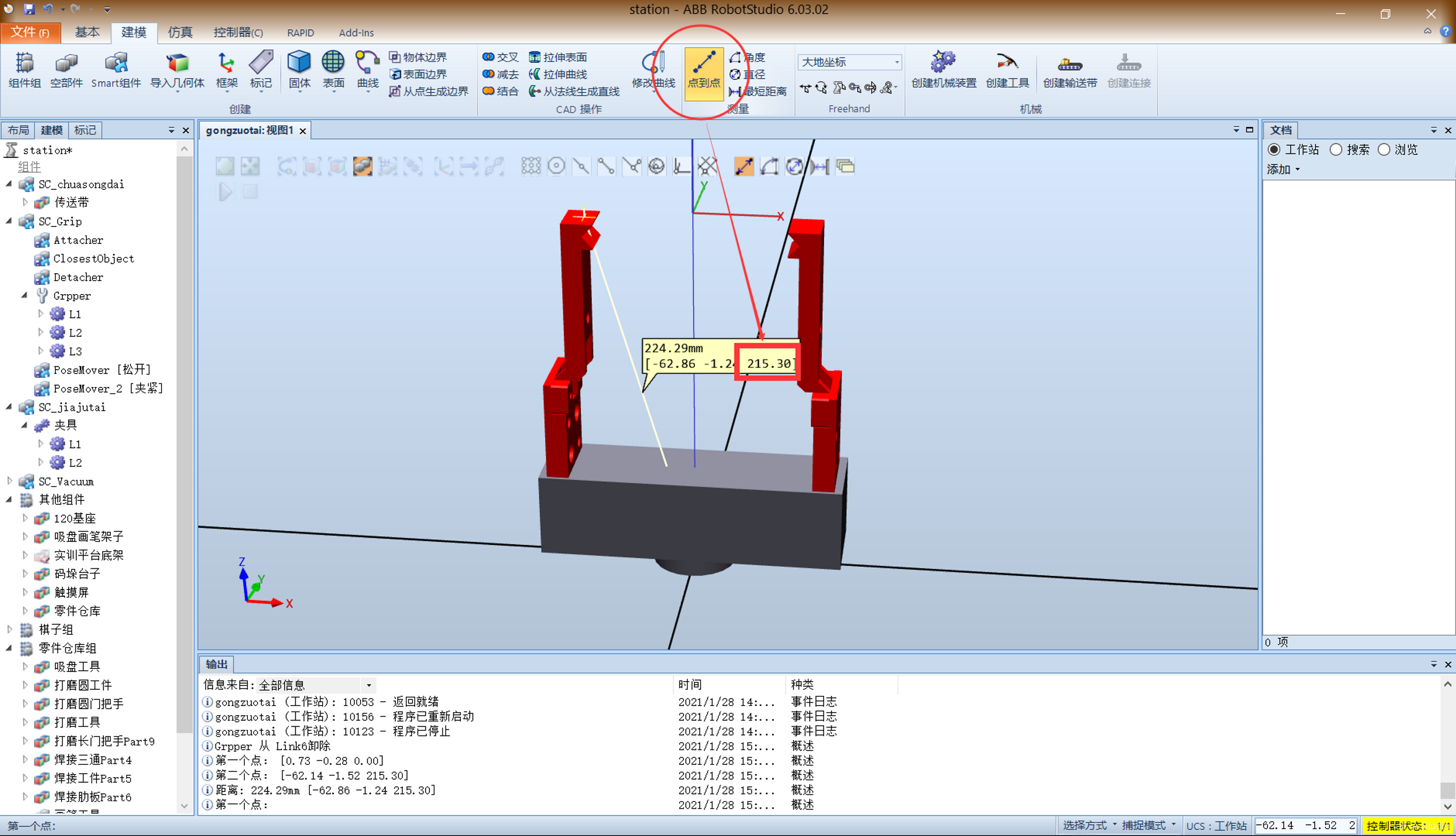
- 点击建模-测量-点到点,选择夹爪底面和末端面,记录得到的z坐标值
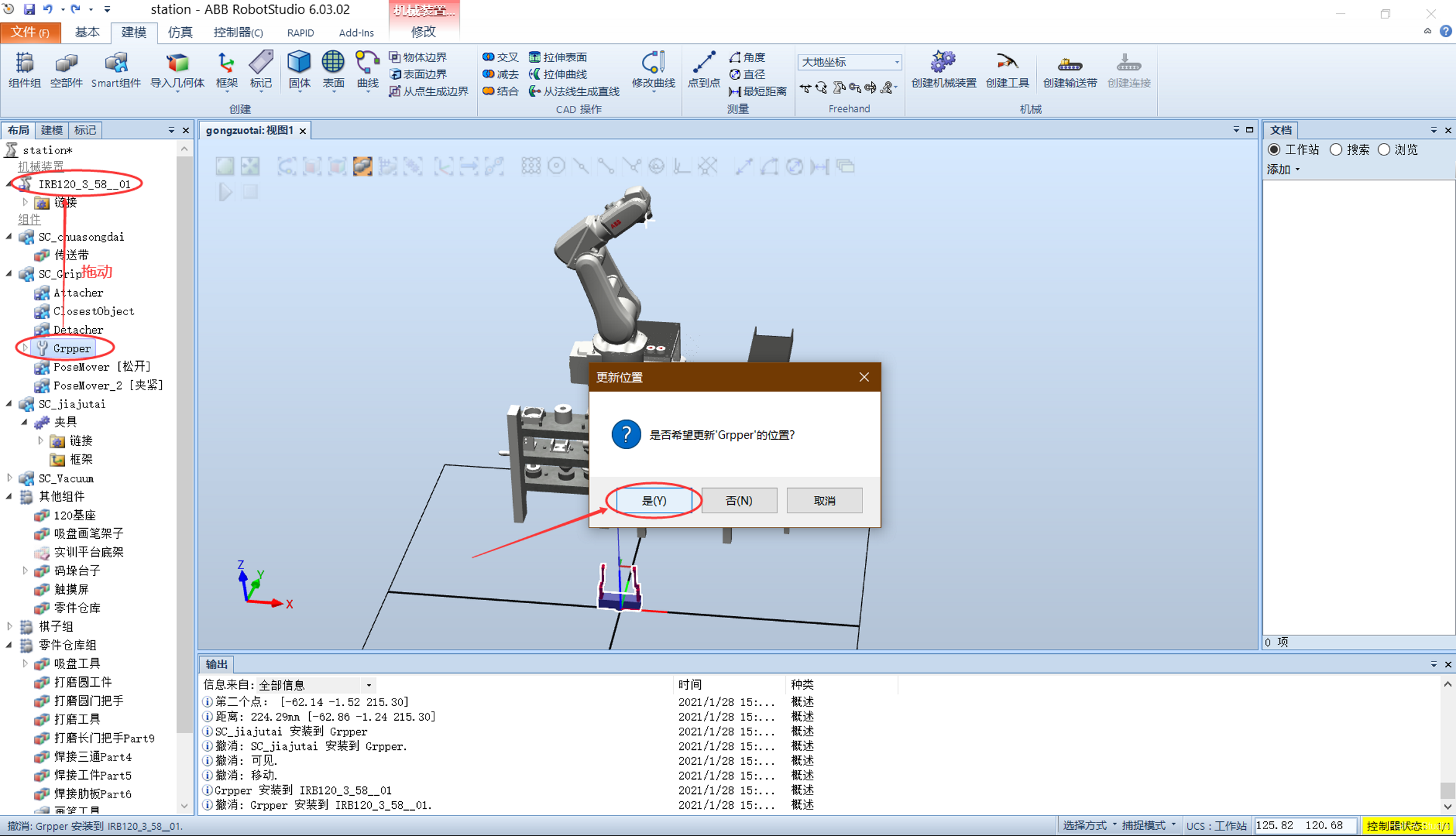
- 将夹爪安装回机器人末端
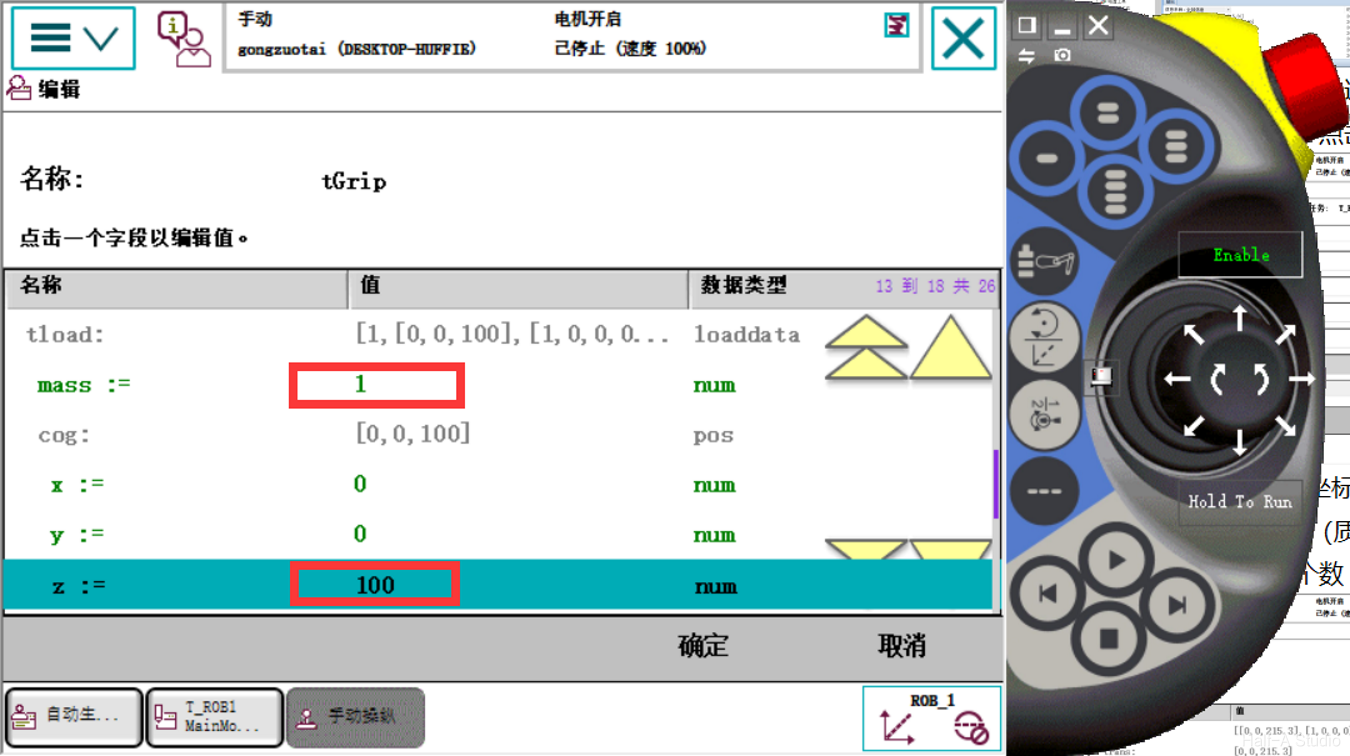
- 打开虚拟示教器,进入手动操纵-工具坐标-新建,修改名称,点击左下角初始值
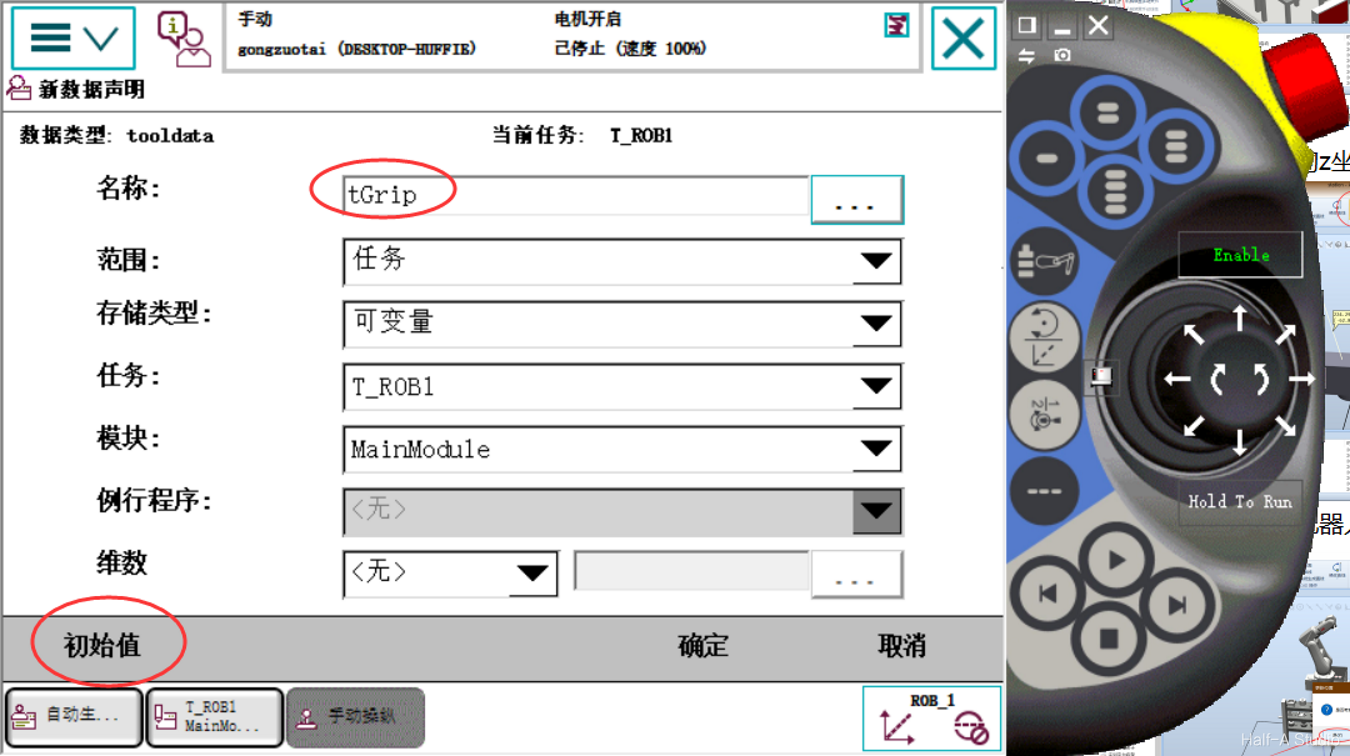
- 修改第一个z(坐标位置)为刚才测得得值215.30,mass(质量)为1,第二个z(重心位置)初估一个数

- 验证坐标,选择动作模式为重定位,工具坐标为刚才新建坐标。操纵摇杆可看到机器人绕夹爪两末端中心点转动。


















06-27
 1万+
1万+
1万+
07-24
8731
8731

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











